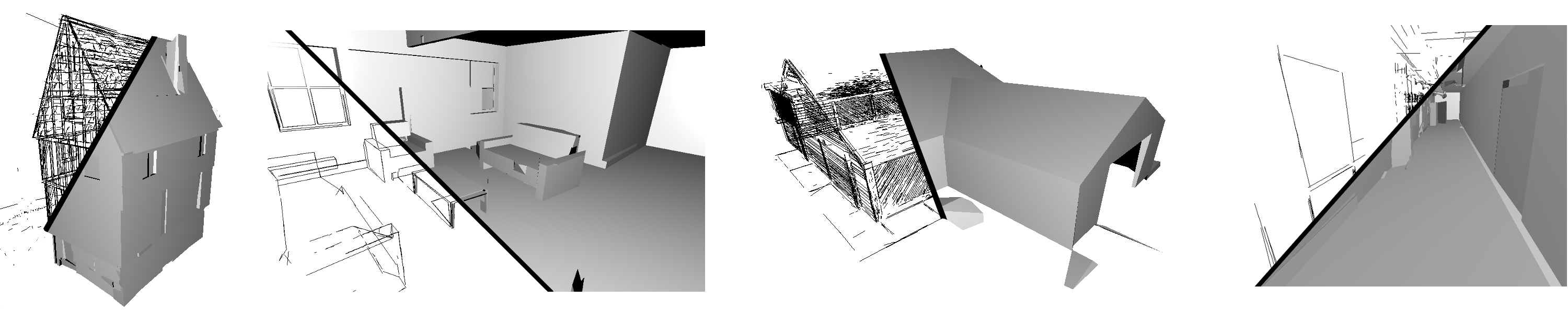
Surface Reconstruction from 3D Line Segments
Surface reconstruction from 3d line segments.
Langlois, P. A., Boulch, A., & Marlet, R.
In 2019 International Conference on 3D Vision (3DV) (pp. 553-563). IEEE.
Installation
-
[IMPORTANT NOTE] The plane arrangement is given as a Linux x64 binary. Please let us know if you need it for an other platform/compiler or if you have issues with it.
-
MOSEK 8 :
- Download
- Installation instructions.
- Request a license (free for academics), and put it in ~/mosek/mosek.lic.
- Set the mosek directory in the MOSEK_DIR environment variable such that <MOSEK_DIR>/8/tools/platform/linux64x86/src/fusion_cxx is a valid path:
export MOSEK_DIR=/path/to/mosek- Make sure that the binaries are available at runtime:
export LD_LIBRARY_PATH=$MOSEK_DIR/8/tools/platform/linux64x86/bin:$LD_LIBRARY_PATH -
Clone this repository:
git clone https://github.com/palanglois/line-surface-reconstruction.git -
Go to the directory:
cd line-surface-reconstruction -
CGAL : Version 4.11 is required:
git clone https://github.com/CGAL/cgal.git external/cgal
cd external/cgal
git checkout releases/CGAL-4.11.3
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make
cd ../../..
- Make a build directory:
mkdir build - Go to the build directory:
cd build - Prepare the project with cmake:
cmake -DCMAKE_BUILD_TYPE=Release .. - Compile the project:
make
Examples
-
Out of the box examples are available in demo.sh
-
An example of a full reconstruction procedure from a simple set of images is available here
-
A benchmark example for an artificial textureless scene (with quantitative evaluation) is available here.
Programs
For every program, a simple documentation is available by running ./<program_name> -h
ransac_on_linesdetects planes in a line set.line_based_recons_paramperforms reconstruction out of a set of lines and detected planes. Computing the linear program is time consuming, but optimizing is way faster. Therefore, this program 1st computes the linear program and enters a loop in which you can manually set the optimization parameters in order to find the optimal ones for your reconstruction.line_based_reconsdoes the same asline_based_recons_parambut the optimization parameters are set directly in the command line. Use it only if you know the optimal parameters for the reconstruction.mesh_metricsprovides evaluation metrics between two meshes.
Visualization
Reconstruction .ply files can be visualized directly in programs such as Meshlab or CloudCompare.
A simple OpenGL viewer is available to directly visualize the json line files.
Raw data
The raw data for Andalusian and HouseInterior is available here. For both examples, it includes the raw images as well as the full calibration in .nvm (VisualSFM) format.
For HouseInterior, a ground truth mesh is also available.
License
Apart from the code located in the external directory, all the code is provided under the GPL license.
The binaries and code provided in the external/PolyhedralComplex directory is provided under the Creative Commons CC-BY-SA license.
If these licenses do not suit your needs, please get in touch with us.
Citing this work
@inproceedings{langlois:hal-02344362,
TITLE = {{Surface Reconstruction from 3D Line Segments}},
AUTHOR = {Langlois, Pierre-Alain and Boulch, Alexandre and Marlet, Renaud},
URL = {https://hal.archives-ouvertes.fr/hal-02344362},
BOOKTITLE = {{2019 International Conference on 3D Vision (3DV)}},
ADDRESS = {Qu{\'e}bec City, Canada},
PUBLISHER = {{IEEE}},
PAGES = {553-563},
YEAR = {2019},
MONTH = Sep,
DOI = {10.1109/3DV.2019.00067},
}






 18 Oct 6, 2022
18 Oct 6, 2022
 29 Dec 28, 2022
29 Dec 28, 2022
 3.9k Jan 5, 2023
3.9k Jan 5, 2023
 364 Dec 28, 2022
364 Dec 28, 2022
 101 Nov 25, 2022
101 Nov 25, 2022
 49 Nov 23, 2022
49 Nov 23, 2022
 72 Nov 9, 2022
72 Nov 9, 2022
 66 Nov 28, 2022
66 Nov 28, 2022
 212 Dec 25, 2022
212 Dec 25, 2022
 272 Dec 28, 2022
272 Dec 28, 2022
 95 Jan 2, 2023
95 Jan 2, 2023
 112 Dec 16, 2022
112 Dec 16, 2022
 201 Dec 21, 2022
201 Dec 21, 2022
 364 Dec 14, 2022
364 Dec 14, 2022
 585 Jan 4, 2023
585 Jan 4, 2023
 86 Dec 20, 2022
86 Dec 20, 2022
 111 Dec 31, 2022
111 Dec 31, 2022
 35 Dec 6, 2022
35 Dec 6, 2022
 14 Nov 25, 2021
14 Nov 25, 2021