Filter By
327 Repositories
Python Hardware
This Home Assistant custom component adds support for controlling Midea dehumidiferes on local network.
This is a custom component for Home assistant that adds support for Midea dehumidifier appliances via the local area network. midea-dehumidifier-lan H
 97 Jan 8, 2023
97 Jan 8, 2023
Examples to accompany the
Examples to accompany the "Raspberry Pi Pico Python SDK" book published by Raspberry Pi Trading, which forms part of the technical documentation in support of Raspberry Pi Pico and the MicroPython port to RP2040.
 589 Jan 8, 2023
589 Jan 8, 2023
Scapy: the Python-based interactive packet manipulation program & library. Supports Python 2 & Python 3.
Scapy Scapy is a powerful Python-based interactive packet manipulation program and library. It is able to forge or decode packets of a wide number of
 8.3k Jan 8, 2023
8.3k Jan 8, 2023

Activate Numpad inside the touchpad with top right corner switch or F8 key
This is a python service which enables switching between numpad and touchpad for the Asus UX433. It may work for other models.
 230 Jan 8, 2023
230 Jan 8, 2023
Isaac Gym Environments for Legged Robots
Isaac Gym Environments for Legged Robots This repository provides the environment used to train ANYmal (and other robots) to walk on rough terrain usi
 372 Jan 8, 2023
372 Jan 8, 2023
🔆 A Python module for controlling power and brightness of the official Raspberry Pi 7
rpi-backlight A Python module for controlling power and brightness of the official Raspberry Pi 7" touch display. Note: This GIF was created using the
 238 Jan 8, 2023
238 Jan 8, 2023
Volkswagen ID component for Home Assistant
Volkswagen ID component for Home Assistant This folder contains both a generic Python 3 library for the Volkswagen ID API and a component for Home Ass
 55 Jan 7, 2023
55 Jan 7, 2023

Provide Unifi device info via api to Home Assistant that will give ap sensors
Unifi AP Device info Provide Unifi device info via api to Home Assistant that will give ap sensors
 12 Jan 7, 2023
12 Jan 7, 2023
My 500 LED xmas tree
xmastree2020 This repository contains the code used for Matt's Christmas tree, as featured in "I wired my tree with 500 LED lights and calculated thei
 581 Jan 7, 2023
581 Jan 7, 2023

Better support for Nuki devices to the Home Assistant
Another attempt to add a better support for Nuki devices to the Home Assistant Features: Lock interface implementation Uses local webhook from bridge
 105 Jan 7, 2023
105 Jan 7, 2023

A set of postprocessing scripts and macro to accelerate the gyroid infill print speed with Klipper
A set of postprocessing scripts and macro to accelerate the gyroid infill print speed with Klipper
 75 Jan 7, 2023
75 Jan 7, 2023

Skykettle ha - Redmond SkyKettle integration for Home Assistant
Redmond SkyKettle integration for Home Assistant This integration allows to cont
 48 Jan 6, 2023
48 Jan 6, 2023

Pinion — Nice-looking interactive diagrams for KiCAD PCBs
Pinion — Nice-looking interactive diagrams for KiCAD PCBs Pinion is a simple tool that allows you to make a nice-looking pinout diagrams for your PCBs
 297 Jan 6, 2023
297 Jan 6, 2023
Easyeda2kicad.py - Convert any LCSC components (including EasyEDA) to KiCad library
easyeda2kicad.py A Python script that convert any electronic components from LCSC or EasyEDA to a Kicad library Installation git clone https://github.
 150 Jan 6, 2023
150 Jan 6, 2023
This is the remake of the program PYOBD. It works on Python3 and all new libraries. It was tested on Linux, Windows, and it should work on MAC too.
This is the remake of the program PYOBD. It works on Python3 and all new libraries. It was tested on Linux, Windows, and it should work on MAC too. You just need an ELM327 USB or bluetooth device and a PC(laptop preferably).
 127 Jan 6, 2023
127 Jan 6, 2023
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments.
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments. ABR Control provides API's for the Mujoco, CoppeliaSim (formerly known as VREP), and Pygame simulation environments, and arm configuration files for one, two, and three-joint models, as well as the UR5 and Kinova Jaco 2 arms. Users can also easily extend the package to run with custom arm configurations. ABR Control auto-generates efficient C code for generating the control signals, or uses Mujoco's internal functions to carry out the calculations.
 277 Jan 5, 2023
277 Jan 5, 2023
DIY split-flap display
The goal is to make a low-cost display that's easy to fabricate at home in small/single quantities (e.g. custom materials can be ordered from Ponoko or similar, and other hardware is generally available).
 2.5k Jan 5, 2023
2.5k Jan 5, 2023

Raspberry Pi Spectrometer
PySpectrometer 2021-03-05 Raspberry Pi Spectrometer The PySpectrometer is a Python (OpenCV and Tkinter) implementation of an optical spectrometer. The
 538 Jan 5, 2023
538 Jan 5, 2023
A battery pack simulation tool that uses the PyBaMM framework
Overview of liionpack liionpack takes a 1D PyBaMM model and makes it into a pack. You can either specify the configuration e.g. 16 cells in parallel a
 40 Jan 5, 2023
40 Jan 5, 2023

🐱🖨Cat printer is a portable thermal printer sold on AliExpress for around $20.
Cat printer is a portable thermal printer sold on AliExpress for around $20. This repository contains Python code for talking to the cat printer over
 671 Jan 5, 2023
671 Jan 5, 2023
HACS gives you a powerful UI to handle downloads of all your custom needs.
HACS (Home Assistant Community Store) Manage (Install, track, upgrade) and discover custom elements for Home Assistant directly from the UI. What? HAC
 3.2k Jan 4, 2023
3.2k Jan 4, 2023
gdsfactory is an EDA (electronics design automation) tool to Layout Integrated Circuits.
gdsfactory 3.5.5 gdsfactory is an EDA (electronics design automation) tool to Layout Integrated Circuits. It is build on top of phidl gdspy and klayou
 147 Jan 4, 2023
147 Jan 4, 2023
Python module for controlling Broadlink RM2/3 (Pro) remote controls, A1 sensor platforms and SP2/3 smartplugs
Python module for controlling Broadlink RM2/3 (Pro) remote controls, A1 sensor platforms and SP2/3 smartplugs
 1.2k Jan 4, 2023
1.2k Jan 4, 2023

Home-Assistant MQTT bridge for Panasonic Comfort Cloud
Panasonic Comfort Cloud MQTT Bridge Home-Assistant MQTT bridge for Panasonic Comfort Cloud. Note: Currently this brige is a one evening prototype proj
 2 Jan 4, 2023
2 Jan 4, 2023
LED effects plugin for klipper
This plugin allows Klipper to run effects and animations on addressable LEDs, such as Neopixels, WS2812 or SK6812.
 238 Jan 4, 2023
238 Jan 4, 2023

A custom mechanical keyboard inspired by the CFTKB Mysterium
Env-KB A custom mechanical keyboard inspired by the CFTKB Mysterium Build Guide and Parts List What is to do? Right now for the first 5 PCBs I have, i
 203 Jan 4, 2023
203 Jan 4, 2023
A simple non-official manager interface I'm using for my Raspberry Pis.
My Raspberry Pi Manager Overview I have two Raspberry Pi 4 Model B devices that I hooked up to my two TVs (one in my bedroom and the other in my new g
 21 Jan 4, 2023
21 Jan 4, 2023
OctoPrint is the snappy web interface for your 3D printer!
OctoPrint OctoPrint provides a snappy web interface for controlling consumer 3D printers. It is Free Software and released under the GNU Affero Genera
 7.1k Jan 3, 2023
7.1k Jan 3, 2023
CPU benchmark by calculating Pi, powered by Python3
cpu-benchmark Info: CPU benchmark by calculating Pi, powered by Python 3. Algorithm The program calculates pi with an accuracy of 10,000 decimal place
 20 Jan 3, 2023
20 Jan 3, 2023
Home Assistant custom integration for Yi cameras: yi-hack-MStar, yi-hack-Allwinner and yi-hack-Allwinner-v2
yi-hack Home Assistant integration Overview yi-hack Home Assistant is a custom integration for Yi cameras (or Sonoff camera) with one of the following
 131 Jan 3, 2023
131 Jan 3, 2023
智能无人机路径规划仿真系统是一个具有操作控制精细、平台整合性强、全方向模型建立与应用自动化特点的软件
Drone智能无人机路径规划仿真系统是一个具有操作控制精细、平台整合性强、全方向模型建立与应用自动化特点的软件。它以A、B两国在C区开展无人机战争为背景,该系统的核心功能是通过仿真平台规划无人机航线,并进行验证输出,数据可导入真实无人机,使其按照规定路线精准抵达战场任一位置,支持多人多设备编队联合行动。
 349 Jan 3, 2023
349 Jan 3, 2023
OPNsense integration with Home Assistant
hass-opnsense Join OPNsense with home-assistant! hass-opnsense uses the built-in xmlrpc service of OPNsense for all interactions. This project is curr
 54 Jan 3, 2023
54 Jan 3, 2023
This is a collection of python modules that interact with the Ryze Tello drone.
This is a collection of python modules that interact with the Ryze Tello drone.
 1.2k Jan 3, 2023
1.2k Jan 3, 2023
This allows you to record keyboard and mouse input, and play it back using pynput.
Record and Play with Python! This allows you to record keyboard and mouse input, and play it back (with looping) using pynput. It allows for automatio
 45 Jan 2, 2023
45 Jan 2, 2023
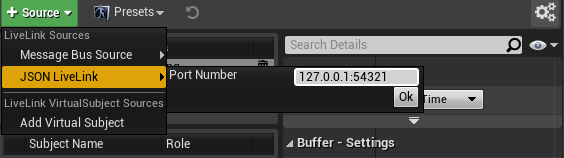
Intel Realsense t265 into Unreal Engine
t265_UE Intel Realsense t265 into Unreal Engine. Windows only, and Livelink plugin is 4.26.2 only at the moment. Might recompile it for different vers
 30 Jan 2, 2023
30 Jan 2, 2023
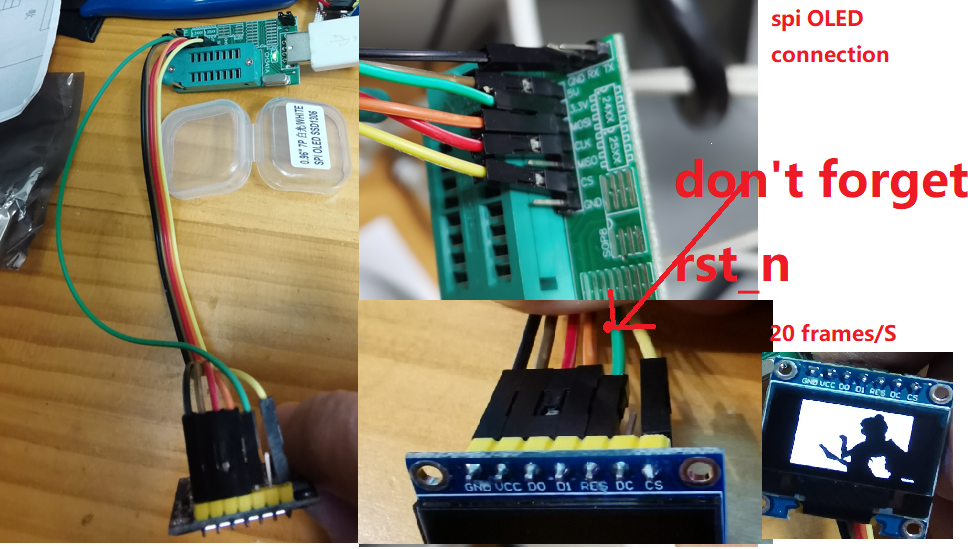
A ch341dll Wrap is for using in Python 32bits windows to access I2C SPI and MDIO (by GPIO), and Demo with display PC sreen on OLED by i2c or SPI .
ch341dll_wrap_typcal_app A ch341dll Wrap is for using in Python 32bits windows to access I2C SPI and MDIO (by GPIO). In addition, I provided 3 Demo. I
 13 Jan 2, 2023
13 Jan 2, 2023

Universal Xiaomi MIoT integration for Home Assistant
Xiaomi MIoT Raw 简体中文 | English MIoT 协议是小米智能家居从 2018 年起推行的智能设备通信协议规范,此后凡是可接入米家的设备均通过此协议进行通信。此插件按照 MIoT 协议规范与设备通信,实现对设备的状态读取及控制。
 1.9k Jan 2, 2023
1.9k Jan 2, 2023
Example code to sending USB Gadget multimedia keys via Python
Send Multimedia USB HID Keys via Python As an USB Gadget in Linux This gives a simple script with zero dependencies that can easily run on any Linux d
 2 Jan 2, 2023
2 Jan 2, 2023
LedFx is a network based LED effect controller with support for advanced real-time audio effects
Welcome to LedFx ✨ -Making music come alive! LedFx website: https://ledfx.app/ What is LedFx? What LedFx offers is the ability to take audio input, an
 786 Jan 2, 2023
786 Jan 2, 2023
Custom component for interacting with Octopus Energy
Home Assistant Octopus Energy ** WARNING: This component is currently a work in progress ** Custom component built from the ground up to bring your Oc
 116 Jan 2, 2023
116 Jan 2, 2023
Inykcal is a software written in python for selected E-Paper displays.
Inykcal is a software written in python for selected E-Paper displays. It converts these displays into useful information dashboards. It's open-source, free for personal use, fully modular and user-friendly. Despite all this, Inkycal can run well even on the Raspberry Pi Zero W. Oh, and it's open for third-party modules! Hooray!
 727 Jan 2, 2023
727 Jan 2, 2023

GUI wrapper designed for convenient service work with TI CC1352/CC2538/CC2652 based Zigbee sticks or gateways. Packed into single executable file
ZigStar GW Multi tool is GUI wrapper firtsly designed for convenient service work with Zig Star LAN GW, but now supports any TI CC1352/CC2538/CC2652 b
 133 Jan 1, 2023
133 Jan 1, 2023
Open source home automation that puts local control and privacy first.
Home Assistant Open source home automation that puts local control and privacy first. Powered by a worldwide community of tinkerers and DIY enthusiast
 57k Jan 1, 2023
57k Jan 1, 2023
Example code and projects for FeatherS2 and FeatherS2 Neo
FeatherS2 & FeatherS2 Neo This repo is a collection of code, firmware, and files
 5 Jan 1, 2023
5 Jan 1, 2023

Huawei Solar sensors for Home Assistant
Huawei Solar Sensors This integration splits out the various values that are fetched from your Huawei Solar inverter into separate HomeAssistant senso
 151 Dec 31, 2022
151 Dec 31, 2022

This repo uses a stereo camera and gray-code-based structured light to realize dense 3D reconstruction.
Structured-light-stereo This repo uses a stereo camera and gray-code-based structured light to realize dense 3D reconstruction. . How to use: STEP 1:
 20 Dec 31, 2022
20 Dec 31, 2022
Python Wrapper for Homeassistant's REST API
HomeassistantAPI Python Wrapper for Homeassistant's REST API Please ⭐️ the repo if you find this project useful or cool! Here is a quick example. from
 29 Dec 31, 2022
29 Dec 31, 2022
A low power 1U Raspberry Pi cluster server for inexpensive colocation.
Raspberry Pi 1U Server There are server colocation providers that allow hosting a 1U server for as low as $30/month, but there's a catch: There are re
 627 Dec 31, 2022
627 Dec 31, 2022
FERM: A Framework for Efficient Robotic Manipulation
Framework for Efficient Robotic Manipulation FERM is a framework that enables robots to learn tasks within an hour of real time training.
 111 Dec 31, 2022
111 Dec 31, 2022
Hook and simulate global mouse events in pure Python
mouse Take full control of your mouse with this small Python library. Hook global events, register hotkeys, simulate mouse movement and clicks, and mu
 722 Dec 31, 2022
722 Dec 31, 2022
Unofficial Playdate reverse-engineering notes/tools - covers file formats, server API and USB commands
Unofficial Playdate reverse-engineering notes/tools - covers file formats, server API and USB commands ⚠️ This documentation is unofficial and is not
 106 Dec 31, 2022
106 Dec 31, 2022
Home Assistant integration for energy consumption data from UK SMETS (Smart) meters using the Hildebrand Glow API.
Hildebrand Glow (DCC) Integration Home Assistant integration for energy consumption data from UK SMETS (Smart) meters using the Hildebrand Glow API. T
 153 Dec 30, 2022
153 Dec 30, 2022
Hook and simulate global keyboard events on Windows and Linux.
keyboard Take full control of your keyboard with this small Python library. Hook global events, register hotkeys, simulate key presses and much more.
3.2k Dec 30, 2022

E-Ink Magic Calendar that automatically syncs to Google Calendar and runs off a battery powered Raspberry Pi Zero
E-Ink Magic Calendar that automatically syncs to Google Calendar and runs off a battery powered Raspberry Pi Zero
 2.8k Dec 30, 2022
2.8k Dec 30, 2022