TOQ-Nets-PyTorch-Release
Pytorch implementation for the Temporal and Object Quantification Networks (TOQ-Nets).
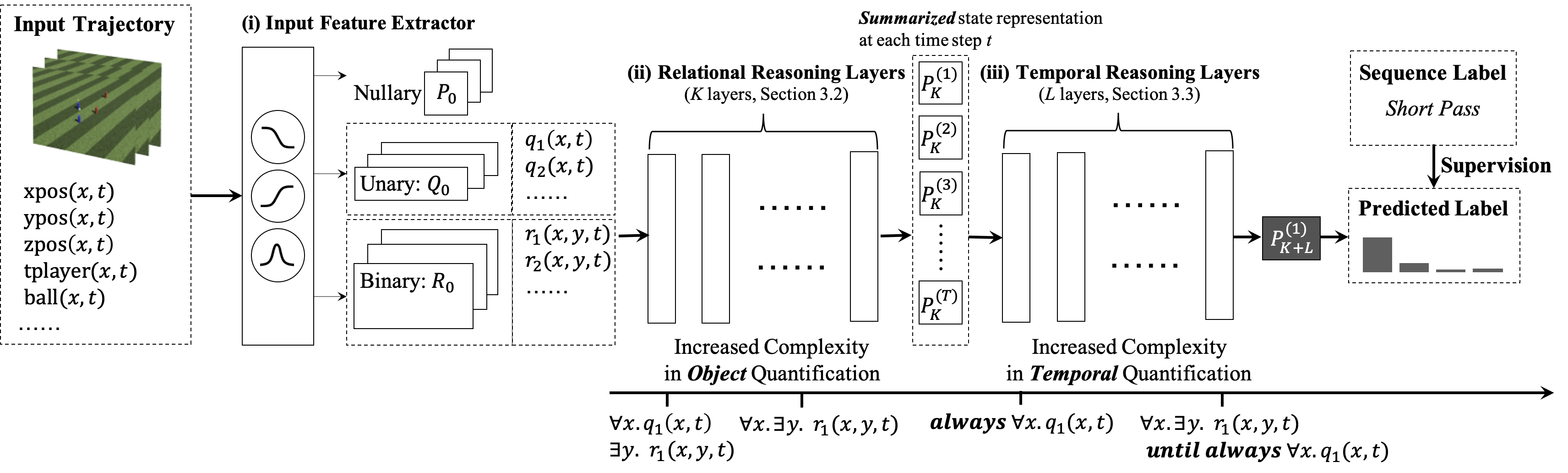
Temporal and Object Quantification Networks
Jiayuan Mao, Zhezheng Luo, Chuang Gan, Joshua B. Tenenbaum, Jiajun Wu, Leslie Pack Kaelbling, and Tomer D. Ullman
In International Joint Conference on Artificial Intelligence (IJCAI) 2021 (Poster)
[Paper] [Project Page] [BibTex]
@inproceedings{Mao2021Temporal,
title={{Temporal and Object Quantification Networks}},
author={Mao, Jiayuan and Luo, Zhezheng and Gan, Chuang and Tenenbaum, Joshua B. and Wu, Jiajun and Kaelbling, Leslie Pack and Ullman, Tomer D.},
booktitle={International Joint Conferences on Artificial Intelligence},
year={2021}
}
Prerequisites
- Python 3
- PyTorch 1.0 or higher, with NVIDIA CUDA Support
- Other required python packages specified by
requirements.txt. See the Installation.
Installation
Install Jacinle: Clone the package, and add the bin path to your global PATH environment variable:
git clone https://github.com/vacancy/Jacinle --recursive
export PATH=<path_to_jacinle>/bin:$PATH
Clone this repository:
git clone https://github.com/vacancy/TOQ-Nets-PyTorch --recursive
Create a conda environment for TOQ-Nets, and install the requirements. This includes the required python packages from both Jacinle TOQ-Nets. Most of the required packages have been included in the built-in anaconda package:
conda create -n nscl anaconda
conda install pytorch torchvision -c pytorch
Dataset preparation
We evaluate our model on four datasets: Soccer Event, RLBench, Toyota Smarthome and Volleyball. To run the experiments, you need to prepare them under NSPCL-Pytorch/data.
Soccer Event
RLBenck
Toyota Smarthome
Dataset can be obtained from the website: Toyota Smarthome: Real-World Activities of Daily Living
@InProceedings{Das_2019_ICCV,
author = {Das, Srijan and Dai, Rui and Koperski, Michal and Minciullo, Luca and Garattoni, Lorenzo and Bremond, Francois and Francesca, Gianpiero},
title = {Toyota Smarthome: Real-World Activities of Daily Living},
booktitle = {The IEEE International Conference on Computer Vision (ICCV)},
month = {October},
year = {2019}
}
Volleyball
Dataset can be downloaded from this github repo.
@inproceedings{msibrahiCVPR16deepactivity,
author = {Mostafa S. Ibrahim and Srikanth Muralidharan and Zhiwei Deng and Arash Vahdat and Greg Mori},
title = {A Hierarchical Deep Temporal Model for Group Activity Recognition.},
booktitle = {2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2016}
}
Training and evaluation.
Standard 9-way classification task
To train the model on the standard 9-way classification task on the soccer dataset:
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1001 --run_name 9_way_classification -Mmodel-name "'NLTL_SAv3'" -Mdata-name "'LongVideoNvN'" -Mn_epochs 200 -Mbatch_size 128 -Mhp-train-estimate_inequality_parameters "(1,1)" -Mmodel-both_quantify False -Mmodel-depth 0
The hyper parameter estimate_inequality_parameters is to estimate the distribution of input physical features, and is only required when training TOQ-Nets (but not for baselines).
Few-shot actions
To train on regular actions and test on new actions:
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1002 --run_name few_shot -Mdata-name "'TrajectorySingleActionNvN_Wrapper_FewShot_Softmax'" -Mmodel-name "'NLTL_SAv3'" -Mlr 3e-3 -Mn_epochs 200 -Mbatch_size 128 -Mdata-new_actions "[('interfere', (50, 50, 2000)), ('sliding', (50, 50, 2000))]" -Mhp-train-finetune_period "(1,200)" -Mhp-train-estimate_inequality_parameters "(1,1)"
You can set the split of few-shot actions using -Mdata-new_actions, and the tuple (50, 50, 2000) represents the number of samples available in training validation and testing.
Generalization to more of fewer players and temporally warped trajectories.
To test the generalization to more or fewer players, as well as temporal warpped trajectories, first train the model on the standard 6v6 games:
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1003 --run_name generalization -Mmodel-name "'NLTL_SAv3'" -Mdata-name "'LongVideoNvN'" -Mdata-n_players 6 -Mn_epochs 200 -Mbatch_size 128 -Mhp-train-estimate_inequality_parameters "(1,1)" -Mlr 3e-3
Then to generalize to games with 11 players:
jac-crun 3 scripts/action_classification_softmax.py -t 1003 --run_name generalization_more_players --eval 200 -Mdata-name "'LongVideoNvN'" -Mdata-n_train 0.1 -Mdata-temporal "'exact'" -Mdata-n_players 11
The number 200 after --eval should be equal to the number of epochs of training. Note that 11 can be replace by any number of players from [3,4,6,8,11].
Similarly, to generalize to temporally warped trajectoryes:
jac-crun 3 scripts/action_classification_softmax.py -t 1003 --run_name generalization_time_warp --eval 200 -Mdata-name "'LongVideoNvN'" -Mdata-n_train 0.1 -Mdata-temporal "'all'" -Mdata-n_players 6
Baselines
We also provide the example commands for training all baselines:
STGCN
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1004 --run_name stgcn -Mmodel-name "'STGCN_SA'" -Mdata-name "'LongVideoNvN'" -Mdata-n_players 6 -Mmodel-n_agents 13 -Mn_epochs 200 -Mbatch_size 128
STGCN-LSTM
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1005 --run_name stgcn_lstm -Mmodel-name "'STGCN_LSTM_SA'" -Mdata-name "'LongVideoNvN'" -Mdata-n_players 6 -Mmodel-n_agents 13 -Mn_epochs 200 -Mbatch_size 128
Space-Time Region Graph
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1006 --run_name strg -Mmodel-name "'STRG_SA'" -Mdata-name "'LongVideoNvN'" -Mn_epochs 200 -Mbatch_size 128
Non-Local
jac-crun <gpu_ids> scripts/action_classification_softmax.py -t 1007 --run_name non_local -Mmodel-name "'NONLOCAL_SA'" -Mdata-name "'LongVideoNvN'" -Mn_epochs 200 -Mbatch_size 128
 1.1k Dec 29, 2022
1.1k Dec 29, 2022

 81 Dec 25, 2022
81 Dec 25, 2022

 2.2k Jan 9, 2023
2.2k Jan 9, 2023
 4 Dec 26, 2021
4 Dec 26, 2021
![[NeurIPS 2021] Well-tuned Simple Nets Excel on Tabular Datasets](https://github.com/releaunifreiburg/WellTunedSimpleNets/raw/main/figures/all_baselines_diagram.png)
 52 Jan 4, 2023
52 Jan 4, 2023
 111 Dec 28, 2022
111 Dec 28, 2022

 305 Dec 16, 2022
305 Dec 16, 2022
 55 Dec 21, 2022
55 Dec 21, 2022
 1k Jan 3, 2023
1k Jan 3, 2023

 75 Dec 15, 2022
75 Dec 15, 2022
 115 Dec 26, 2022
115 Dec 26, 2022
 63 Nov 14, 2022
63 Nov 14, 2022
 1.4k Dec 28, 2022
1.4k Dec 28, 2022
 207 Dec 30, 2022
207 Dec 30, 2022
 5 Sep 16, 2022
5 Sep 16, 2022
 4 Dec 11, 2022
4 Dec 11, 2022
 443 Dec 6, 2022
443 Dec 6, 2022
 63 Sep 27, 2022
63 Sep 27, 2022
 56 Jan 2, 2023
56 Jan 2, 2023