JAXDL: JAX (Flax) Deep Learning Library
Simple and clean JAX/Flax deep learning algorithm implementations:
- Soft-Actor-Critic (arXiv:1812.05905)
- Transformer (arXiv:1706.03762; planned)
- Unified Graph Network Blocks (arXiv:1806.01261; planned)
If you use JAXDL in your work, please cite this repository as follows:
@misc{jaxdl,
author = {Hart, Patrick},
month = {10},
doi = {10.5281/zenodo.5596512},
title = {{JAXDL: JAX Deep Learning Algorithm Implementations.}},
url = {https://github.com/patrickhart/jaxdl},
year = {2021}
}
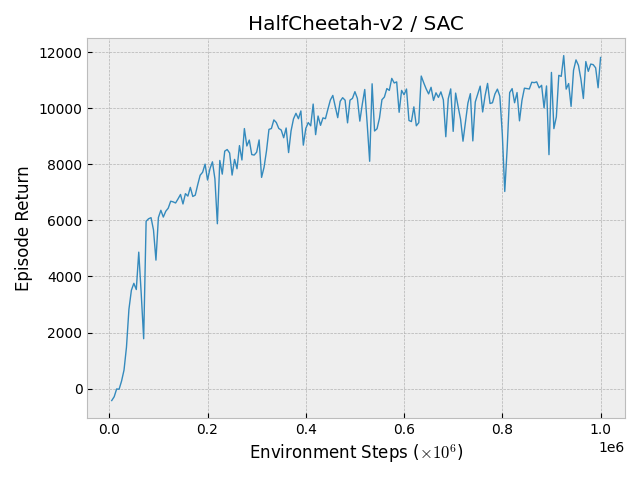
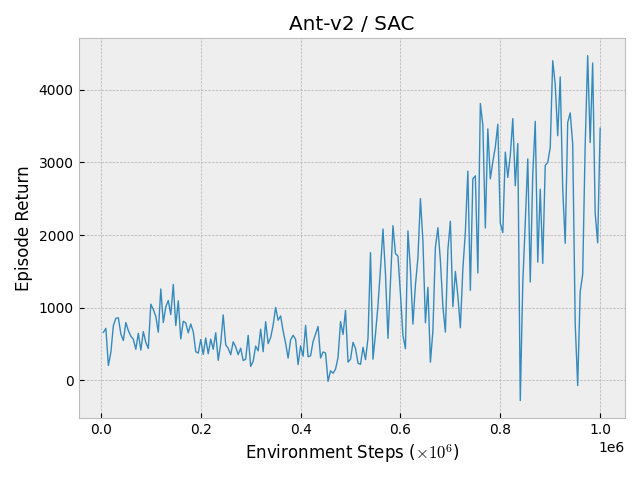
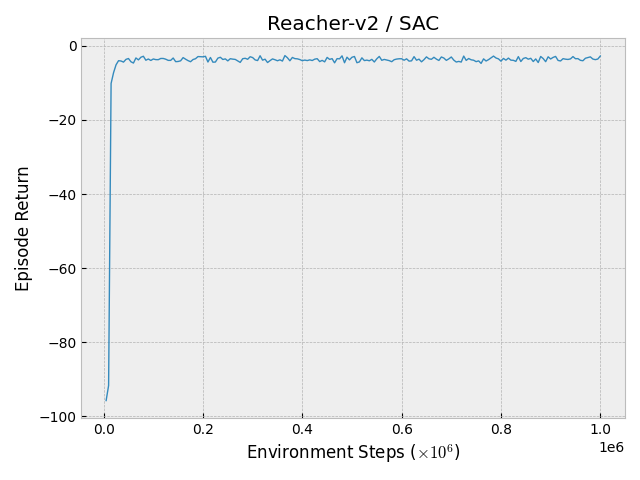
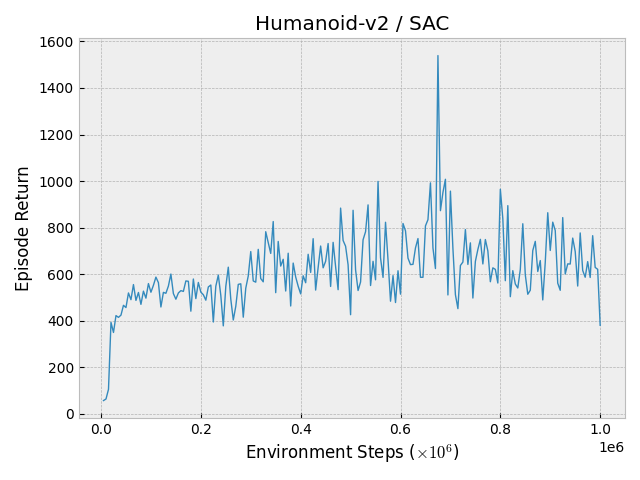
Results / Benchmark
Continous Control From States
| HalfCheetah-v2 | Ant-v2 |
|---|---|
 |
 |
| Reacher-v2 | Humanoid-v2 |
 |
 |
Installation
Install JAXDL using PyPi pip install jaxdl.
To use MuJoCo 2.1 you need to run pip install git+https://github.com/nimrod-gileadi/mujoco-py and place the binaries of MuJoCo in ~/.mujoco/mujoco210.
Examples / Getting Started
To get started have a look in the examples folder.
To train a reinforcement learning agent run
python examples/run_rl.py \
--mode=train \
--env_name=Ant-v2 \
--save_dir=./tmp/
To visualize the trained agent use
python examples/run_rl.py \
--mode=visualize \
--env_name=Ant-v2 \
--save_dir=./tmp/
Tensorboard
Monitor the training run using:
tensorboard --logdir=/save_dir/
Contributing
Contributions are welcome! This repository is meant to provide clean and simple implementations – please consider this when contributing.
 64 Nov 27, 2022
64 Nov 27, 2022
 23 Oct 19, 2022
23 Oct 19, 2022
 6.2k Jan 1, 2023
6.2k Jan 1, 2023

 216 Dec 20, 2022
216 Dec 20, 2022
 208 Dec 14, 2022
208 Dec 14, 2022
 21 Dec 14, 2022
21 Dec 14, 2022

 8 Nov 7, 2022
8 Nov 7, 2022
 2.3k Jan 4, 2023
2.3k Jan 4, 2023
 0 Nov 2, 2021
0 Nov 2, 2021

 3.9k Jan 2, 2023
3.9k Jan 2, 2023
 169 Dec 26, 2022
169 Dec 26, 2022
 26 Nov 28, 2022
26 Nov 28, 2022
 16 Jun 16, 2022
16 Jun 16, 2022
 62 Nov 25, 2022
62 Nov 25, 2022
 26 Oct 5, 2022
26 Oct 5, 2022
 7 Dec 1, 2022
7 Dec 1, 2022
 3 Jan 23, 2022
3 Jan 23, 2022
 14 Nov 29, 2022
14 Nov 29, 2022
 6 Mar 3, 2022
6 Mar 3, 2022