ICCVW21-TradiCV-Survey-of-LiDAR-Cluster
Motivation
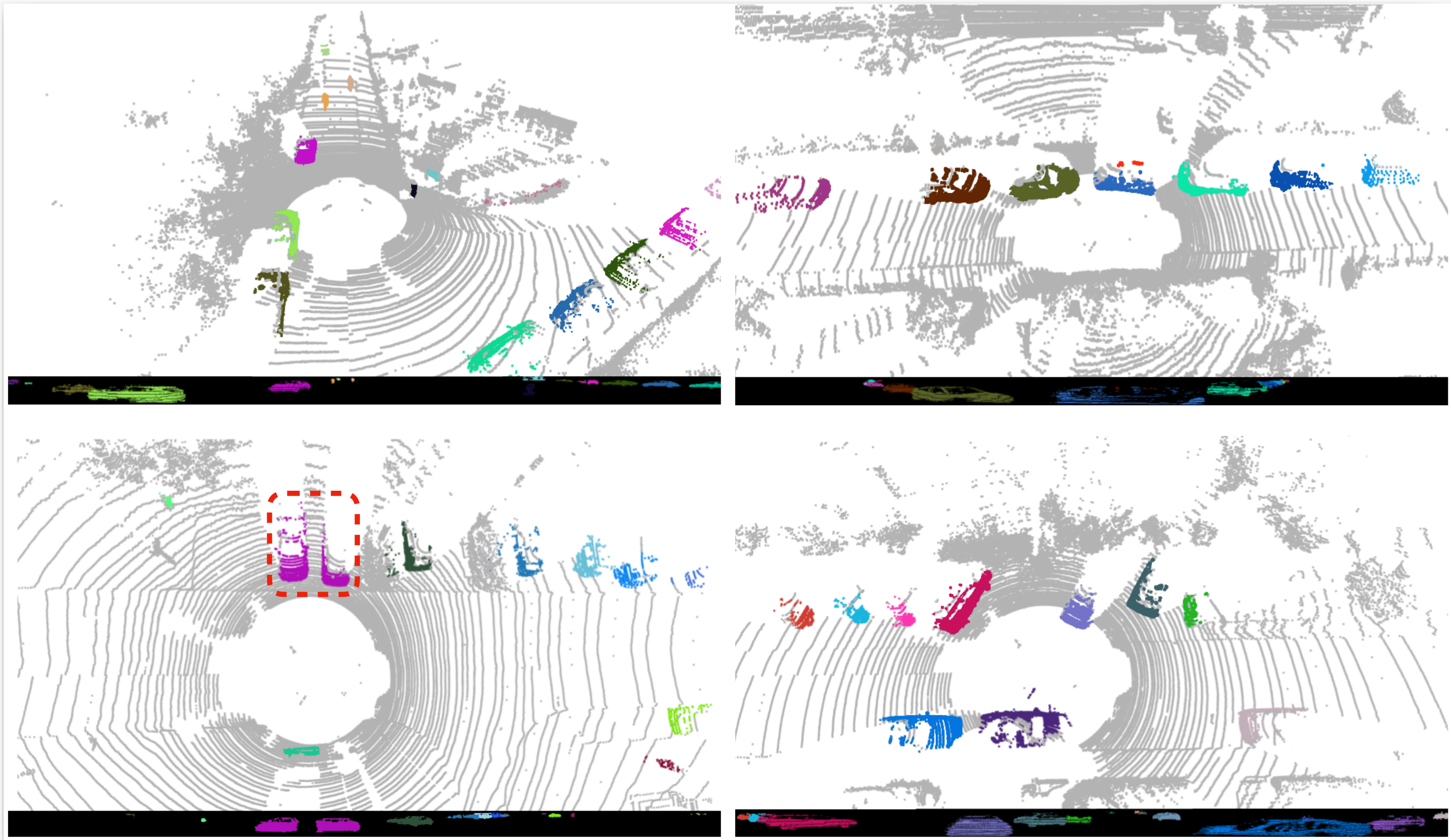
In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a hybrid method with an existing semantic segmentation network to extract semantic information and a traditional LiDAR point cloud cluster algorithm to split each instance object. We argue geometry-based traditional clustering algorithms are worth being considered by showing a state-of-the-art performance among all published end-to-end deep learning solutions on the panoptic segmentation leaderboard of the SemanticKITTI dataset. To our best knowledge, we are the first to attempt the point cloud panoptic segmentation with clustering algorithms. Therefore, instead of working on new models, we give a comprehensive technical survey in this paper by implementing four typical cluster methods and report their performances on the benchmark. Those four cluster methods are the most representative ones with real-time running speed. They are implemented with C++ in this paper and then wrapped as a python function for seamless integration with the existing deep learning frameworks.
Dataset Organization
ICCVW21-LiDAR-Panoptic-Segmentation-TradiCV-Survey-of-Point-Cloud-Cluster
├── Dataset
├ ├── semanticKITTI
├ ├── semantic-kitti-api-master
├ ├── semantic-kitti.yaml
├ ├── data_odometry_velodyne ── dataset ── sequences ── train, val, test # each folder contains the corresponding sequence folders 00,01...
├ ├── data_odometry_labels ── dataset ── sequences ── train, val, test # each folder contains the corresponding sequence folders 00,01...
├ └── data_odometry_calib
├── method_predictions ── sequences
How to run
```
docker pull pytorch/pytorch:1.7.1-cuda11.0-cudnn8-runtime
```
Install dependency packages:
```
bash install_dependency.sh
```
Compile specific clusters
```
cd PC_cluster
cd ScanLineRun_cluster/Euclidean_cluster/depth_cluster/SuperVoxel_cluster
bash prepare_packages.sh/prepare_pybind.sh
bash build.sh
```
Note, prepare_packages.sh may redundantly install packages as clusters are supposed to be used independently.
One can download the predicted validation results of Cylinder3D from here: https://drive.google.com/file/d/1QkV8zmRaOAgAZse5CGtlmijcLJVnh7XP/view?usp=sharing
We get the prediction of validation 08 sequence by using the provided checkpoint of Cylinder3D. Thanks for sharing the code!
After downloading, unzip the 08 file, put it inside ./method_predictions/sequences/
It looks like ./method_predictions/sequences/08/predictions/*.label
Run the cluster algorithm
```
python semantic_then_instance_post_inferece.py
```
It should keep updating the visualization figure output_example.png, and overwrite predicted labels in ./method_predictions/sequences/08/predictions/
One can unzip 08 again if wants to run the cluster algorithm again.
Some parameters can be tuned in args parser.
After generating the predicted panoptic label on validation set, one can simply run:
```
bash evaluation_panoptic.sh
```
Some changes of local path may need to be done. Just follow the error to change them, should be easy.
The reported numbers should be exactly the same as the paper since traditional methods have no randomness.
Publication
Please cite the paper if you use this code:
@inproceedings{zhao2021technical,
title={A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation},
author={Zhao, Yiming and Zhang, Xiao and Huang, Xinming},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={2464--2473},
year={2021}
}

 5 Dec 10, 2022
5 Dec 10, 2022

 159 Dec 22, 2022
159 Dec 22, 2022
 21.8k Jan 9, 2023
21.8k Jan 9, 2023

 308 Jan 4, 2023
308 Jan 4, 2023

 114 Dec 29, 2022
114 Dec 29, 2022

 119 Jan 2, 2023
119 Jan 2, 2023

 63 Dec 9, 2022
63 Dec 9, 2022

![[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer](https://github.com/AllenXiangX/SnowflakeNet/raw/main/pics/network.png)
 65 Dec 26, 2022
65 Dec 26, 2022


 111 Dec 16, 2022
111 Dec 16, 2022
 48 Nov 27, 2022
48 Nov 27, 2022
 78 Dec 27, 2022
78 Dec 27, 2022
 704 Dec 27, 2022
704 Dec 27, 2022
 4 Jul 15, 2022
4 Jul 15, 2022
 259 Dec 25, 2022
259 Dec 25, 2022
 12.6k Jan 9, 2023
12.6k Jan 9, 2023
 81 Nov 26, 2022
81 Nov 26, 2022