img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation

Table of contents
Paper details
Vítor Albiero, Xingyu Chen, Xi Yin, Guan Pang, Tal Hassner, "img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation," arXiv:2012.07791, Dec., 2020
Abstract
We propose real-time, six degrees of freedom (6DoF), 3D face pose estimation without face detection or landmark localization. We observe that estimating the 6DoF rigid transformation of a face is a simpler problem than facial landmark detection, often used for 3D face alignment. In addition, 6DoF offers more information than face bounding box labels. We leverage these observations to make multiple contributions: (a) We describe an easily trained, efficient, Faster R-CNN--based model which regresses 6DoF pose for all faces in the photo, without preliminary face detection. (b) We explain how pose is converted and kept consistent between the input photo and arbitrary crops created while training and evaluating our model. (c) Finally, we show how face poses can replace detection bounding box training labels. Tests on AFLW2000-3D and BIWI show that our method runs at real-time and outperforms state of the art (SotA) face pose estimators. Remarkably, our method also surpasses SotA models of comparable complexity on the WIDER FACE detection benchmark, despite not been optimized on bounding box labels.
Citation
If you use any part of our code or data, please cite our paper.
@article{albiero2020img2pose,
title={img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation},
author={Albiero, Vítor and Chen, Xingyu and Yin, Xi and Pang, Guan and Hassner, Tal},
journal={arXiv preprint arXiv:2012.07791},
year={2020}
}
Installation
Install dependecies with Python 3.
pip install -r requirements.txt
Install the renderer, which is used to visualize predictions. The renderer implementation is forked from here.
cd Sim3DR
sh build_sim3dr.sh
Training
Prepare WIDER FACE dataset
First, download our annotations as instructed in Annotations.
Download WIDER FACE dataset and extract to datasets/WIDER_Face.
Then, to create the train and validation files (LMDB), run the following scripts.
python3 convert_json_list_to_lmdb.py
--json_list ./annotations/WIDER_train_annotations.txt
--dataset_path ./datasets/WIDER_Face/WIDER_train/images/
--dest ./datasets/lmdb/
-—train
This first script will generate a LMDB dataset, which contains the training images along with annotations. It will also output a pose mean and std deviation files, which will be used for training and testing.
python3 convert_json_list_to_lmdb.py
--json_list ./annotations/WIDER_val_annotations.txt
--dataset_path ./datasets/WIDER_Face/WIDER_val/images/
--dest ./datasets/lmdb
This second script will create a LMDB containing the validation images along with annotations.
Train
Once the LMDB train/val files are created, to start training simple run the script below.
CUDA_VISIBLE_DEVICES=0 python3 train.py
--pose_mean ./datasets/lmdb/WIDER_train_annotations_pose_mean.npy
--pose_stddev ./datasets/lmdb/WIDER_train_annotations_pose_stddev.npy
--workspace ./workspace/
--train_source ./datasets/lmdb/WIDER_train_annotations.lmdb
--val_source ./datasets/lmdb/WIDER_val_annotations.lmdb
--prefix trial_1
--batch_size 2
--lr_plateau
--early_stop
--random_flip
--random_crop
--max_size 1400
For now, only single GPU training is tested. Distributed training is partially implemented, PRs welcome.
Testing
To evaluate with the pretrained model, download the model from Model Zoo, and extract it to the main folder. It will create a folder called models, which contains the model weights and the pose mean and std dev that was used for training.
If evaluating with own trained model, change the pose mean and standard deviation to the ones trained with.
Visualizing trained model
To visualize a trained model on the WIDER FACE validation set run the notebook visualize_trained_model_predictions.
WIDER FACE dataset evaluation
If you haven't done already, download the WIDER FACE dataset and extract to datasets/WIDER_Face.
python3 evaluation/evaluate_wider.py
--dataset_path datasets/WIDER_Face/WIDER_val/images/
--dataset_list datasets/WIDER_Face/wider_face_split/wider_face_val_bbx_gt.txt
--pretrained_path models/img2pose_v1.pth
--output_path results/WIDER_FACE/Val/
To check mAP and plot curves, download the eval tools and point to results/WIDER_FACE/Val.
AFLW2000-3D dataset evaluation
Download the AFLW2000-3D dataset and unzip to datasets/AFLW2000.
Run the notebook aflw_2000_3d_evaluation.
BIWI dataset evaluation
Download the BIWI dataset and unzip to datasets/BIWI.
Run the notebook biwi_evaluation.
Testing on your own images
Run the notebook test_own_images.
Output customization
For every face detected, the model outputs by default:
- Pose: pitch, yaw, roll, horizontal translation, vertical translation, and scale
- Projected bounding boxes: left, top, right, bottom
- Face scores: 0 to 1
Since the projected bounding box without expansion ends at the start of the forehead, we provide a way of expanding the forehead invidually, along with default x and y expansion.
To customize the size of the projected bounding boxes, when creating the model change any of the bounding box expansion variables as shown below (a complete example can be seen at visualize_trained_model_predictions).
# how much to expand in width
bbox_x_factor = 1.1
# how much to expand in height
bbox_y_factor = 1.1
# how much to expand in the forehead
expand_forehead = 0.3
img2pose_model = img2poseModel(
...,
bbox_x_factor=bbox_x_factor,
bbox_y_factor=bbox_y_factor,
expand_forehead=expand_forehead,
)
Align faces
To align the detected faces, call the function bellow passing the reference points, the image with the faces to align, and the poses outputted by img2pose. The function will return a list with PIL images containing one aligned face per give pose.
from utils.pose_operations import align_faces
# load reference points
threed_points = np.load("pose_references/reference_3d_5_points_trans.npy")
aligned_faces = align_faces(threed_points, img, poses)
Resources
License
Check license for license details.




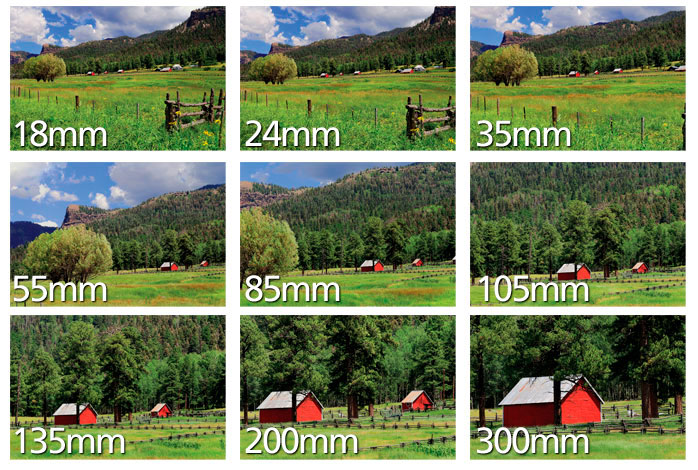
 because the larger focal length means a smaller field of view,
because the larger focal length means a smaller field of view,

 a) The rendered result of the img2pose.
a) The rendered result of the img2pose.
 b) The rendered result using the GT values that are obtained in the train.py using below additional codes:
b) The rendered result using the GT values that are obtained in the train.py using below additional codes:




 722 Dec 27, 2022
722 Dec 27, 2022
 4 Nov 3, 2022
4 Nov 3, 2022
 5.8k Dec 31, 2022
5.8k Dec 31, 2022
 3.4k Jan 2, 2023
3.4k Jan 2, 2023
 104 Dec 8, 2022
104 Dec 8, 2022
 75 Dec 13, 2022
75 Dec 13, 2022
 4 Dec 15, 2022
4 Dec 15, 2022
 99 Dec 30, 2022
99 Dec 30, 2022
 256 Dec 24, 2022
256 Dec 24, 2022
 328 Dec 17, 2022
328 Dec 17, 2022
 52 Nov 25, 2022
52 Nov 25, 2022
 99 Dec 31, 2022
99 Dec 31, 2022
 3 Oct 7, 2022
3 Oct 7, 2022
 1.2k Dec 21, 2022
1.2k Dec 21, 2022
 450 Dec 28, 2022
450 Dec 28, 2022
 42 Nov 24, 2022
42 Nov 24, 2022
 42 Dec 30, 2022
42 Dec 30, 2022
 51 Oct 14, 2022
51 Oct 14, 2022
 367 Dec 27, 2022
367 Dec 27, 2022