inverted-pendulum-fuzzy-control-
inverted pendulum fuzzy control python code (python 2.7.18)
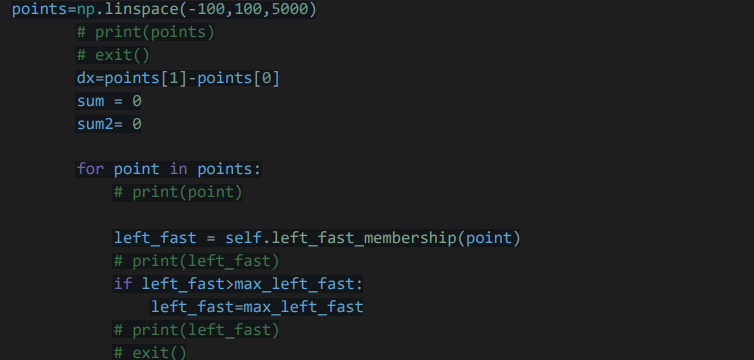
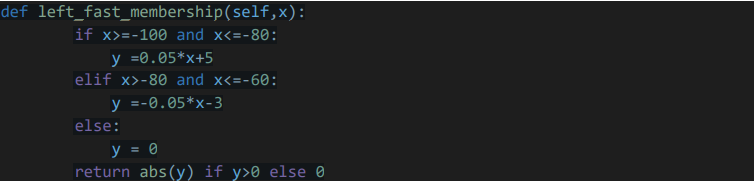
We have 3 general functions for 3 main steps: fuzzification function 1 In this function the input is received and given by the given figures and the calculation of the line equation We each calculate the function of their belonging to the fuzzy set. pa: REAL; (* description = 'pendulum angle', min = 0, max = 360, unit = 'degrees' ) pv: REAL; ( description = 'pendulum angular velocity', min = - 200, max = 200, unit = 'degrees per second' *) The output of this function is 15 functions belonging to pa and pv. [up_more_right, up_right, up, up_left, up_more_left, down_more_left, do wn_left, down, down_right, down_more_right] [cw_fast_pv, cw_slow_pv, stop_pv, ccw_slow_pv, ccw_fast_pv] inference function 2 In this function, 15 outputs of the previous function are given as input. Using the 43 rules mentioned 5 lists of the output belonging function of these 43 rules as power We set the fuzzy belonging set to force and give it a maximum of 5 lists of belonging functions Return the output title. function 3 Using the 5 inputs of the center of mass function of the shape resulting from the collision of this maximum We get the inputs and the fuzzy force set by the integration method and get it We return in the form of output force. Example To check a membership to a fuzzy force set:
Finally, our output is as follows: 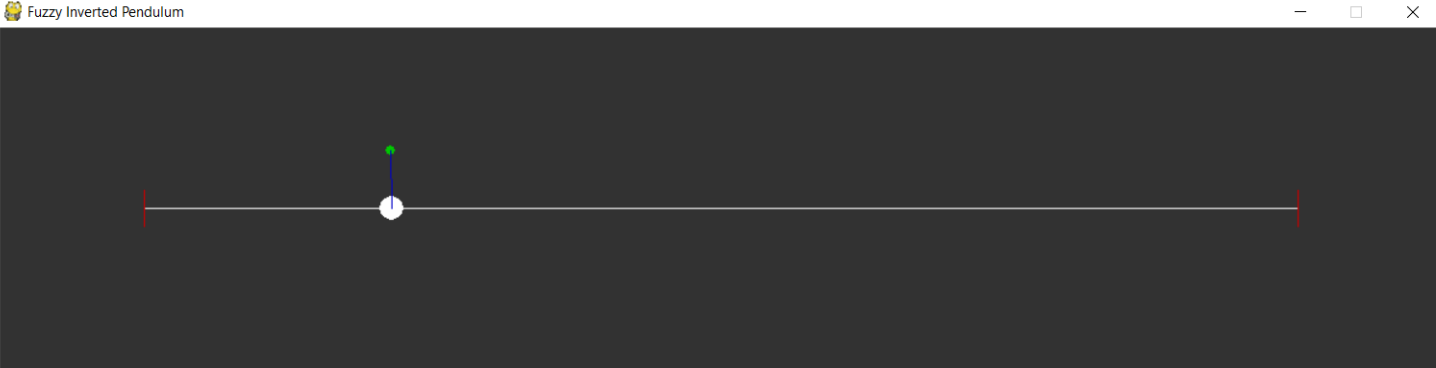
 57k Jan 2, 2023
57k Jan 2, 2023

 0 Jul 19, 2022
0 Jul 19, 2022

 138 Jan 7, 2023
138 Jan 7, 2023

 6 Feb 16, 2022
6 Feb 16, 2022
 1 Oct 24, 2021
1 Oct 24, 2021
 1 Nov 24, 2021
1 Nov 24, 2021
 0 Feb 23, 2022
0 Feb 23, 2022

 4 Aug 22, 2022
4 Aug 22, 2022

 3 May 4, 2022
3 May 4, 2022

 62 Dec 14, 2022
62 Dec 14, 2022
 3 Sep 19, 2022
3 Sep 19, 2022
 4 Aug 3, 2022
4 Aug 3, 2022
 31 Sep 15, 2022
31 Sep 15, 2022
 1 Jan 22, 2022
1 Jan 22, 2022
 68 Nov 2, 2022
68 Nov 2, 2022
 1 Nov 2, 2021
1 Nov 2, 2021
 8 Sep 22, 2022
8 Sep 22, 2022
 1 Dec 27, 2021
1 Dec 27, 2021
 2 Mar 1, 2022
2 Mar 1, 2022