PCAT点云标注工具-使用手册
-
Demo项目,请自行魔改
-
This is the open source version:
Author: WenwenDuTEL: 18355180339E-mail: [email protected] -
Video tutorial:
-
https://v.youku.com/v_show/id_XNDYxNjY4MDExMg==.html?spm=a2h0k.11417342.soresults.dtitle -
https://v.youku.com/v_show/id_XNDYxNjY4MDI5Mg==.html?spm=a2hzp.8244740.0.0
I. 配置使用环境及安装
配置要求:ubuntu16.04 + ROS Kinetic full注意:请务必保证系统使用原生python2.7,在使用Anaconda2的情况下,请在~/.bashrc环境变量中临时关闭Anaconda2,避免冲突。(如果你长期使用ROS,强烈建议在虚拟环境下使用anaconda,避免冲突。)
1. 安装ROS-Kinetic
参考ROS WiKi-安装说明, 安装步骤如下:
/etc/apt/sources.list.d/ros-latest.list'
添加ROS源秘钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新源
sudo apt-get update
">
添加ROS源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加ROS源秘钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新源
sudo apt-get update
安装ROS完整版:(由于使用Rviz,PCL等模块,请务必安装完整版)
sudo apt-get install ros-kinetic-desktop-full
sudo apt-cache search ros-kinetic
初始化ROS:
sudo rosdep init
rosdep update
> ~/.bashrc
source ~/.bashrc
更新ROS环境变量
source /opt/ros/kinetic/setup.bash
">
添加环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
更新ROS环境变量
source /opt/ros/kinetic/setup.bash
测试ROS是否成功安装:
开启一个新的Teminnal,输入:
roscore
测试Rviz
开启一个新的Teminnal,输入:
rviz
成功显示rviz界面如下: 
2. 安装PCAT标注工具
(1) 进入文件夹PCAT
(2) 开启终端,运行安装命令: sh install.sh
(3) 显示 install successful 后,home文件夹下出现lidar_annotation文件夹,安装成功
II. 导入pcd文件
- 导入待标注点云pcd文件
Copy 待标注的点云.pcd格式文件到 lidar_annotation/pcd/ 文件夹下
注意:标注工具默认支持激光雷达pcd格式点云,Field为[x,y,z,intensity],如果使用XYZRGB等其他pcd format,请在src/rviz_cloud_annotation/launch/annotation.launch中更改pcd_type参数的value.
常见issue
[1] 如何支持其他类型pcd或其他3Dpoints? 修改以下code...
// src/rviz_cloud_annotation/src/rviz_cloud_annotation_class.cpp
void RVizCloudAnnotation::LoadCloud(const std::string &filename,
const std::string &normal_source,
PointXYZRGBNormalCloud &cloud);
- 开始标注
打开 Teminnal, 运行: sh run.sh
显示标注界面如下: 
III. 标注手册正篇
首次使用请务必仔细阅读
1. 标注面板详解
下面就上图中 A, B, C, D, E 5个模块做详细说明:
- A. 标注菜单栏
标注菜单栏由 [文件], [编辑],[视图],[标记],[选择] 5部分组成
文件:(1)切换新文件,(2)清除当前帧标记,(3)保存
编辑:(1)取消,(2)恢复
视图:(1)增加点的尺寸,(2)减小点的尺寸,(3)重置点的尺寸
标记:(1)清除当前物体的标记,(2)切换颜色,(3)设置障碍物BBox遮挡系数,(4)调节障碍物BBox方位,(5)调节障碍物BBox尺寸
选择:(1)跳转至下一物体,(2)跳转至上一物体
特别说明:
1.切换新文件会自动保存当前文件的标注信息
2.取消/恢复开销较大,尽量避免使用
3.标记完成一个物体后,需要切换到下一个物体进行标注,否则会覆盖当前标记;选择新的颜色会自动切换到下一物体;物体ID显示在面板上
4.标记障碍物时,颜色 1~5,6~10,11~15,16~20 分别对应标签: 小车,大车,行人,骑行;
5.标记障碍物时,需要设置方位角和遮挡系数,请以实际为准标注,0--不遮挡,1--完全遮挡
尽量使用简洁的方式完成标注,熟练使用快捷键可以有效提高标注速度。
 特别说明 1.点云被重复标记为 障碍物,路沿,车道线,地面时,标签优先级为 (障碍物 > 路沿/车道线 > 地面)
特别说明 1.点云被重复标记为 障碍物,路沿,车道线,地面时,标签优先级为 (障碍物 > 路沿/车道线 > 地面)
2.标注步骤
在看标注说明之前请务必观看视频教程
- 标注请按照: 【障碍物--> 路沿-->车道线-->地面】 的顺序。
(1) 障碍物
障碍物包括 小车(轿车),大车(卡车、有轨电车等),行人,骑行(电动车)4类。
在该数据集中主要包含 小车和行人,及少量的大车和骑行。请在标注`颜色面板`选择不同的按钮,对应不同的障碍物。
颜色面板分为4大块,颜色 1~5,6~10,11~15,16~20 分别对应: 小车,大车,行人,骑行,代表不同的障碍物。
对每一帧的点云,障碍物存在则标注,不存在则不标注;每标注完一个障碍物,需要==切换至下一个障碍物进行新的标注。
(比如:标完第一辆小车,需要按`Shitf+N` 切换至下一小车,或者按`Shift+P`切换至上一障碍物进行修改)。
选择新的颜色会自动切换至新的下一障碍物。
每个障碍物,需要标注人员自己判断大致的朝向,并进行方位调节(R、F键)。
受到遮挡的障碍物请设置`遮挡系数`,默认为 0,即不遮挡,大多数障碍物不存在遮挡。

(2) 路沿
路沿指道路中地面的边界,如上图显示;标记路沿只能使用点选的方式标注(具体操作可以参考标注视频教程)
一般一帧点云中有多条路沿,每标记一条,需要切换至下一路沿进行标注,切换方式与障碍物切换相同。
(3) 车道线
车道线指道路中颜色明显突出的线段,一般出现的频率比较低,没有出现或者看不清楚则不用标注;车道线的标注方式与路沿完全相同。
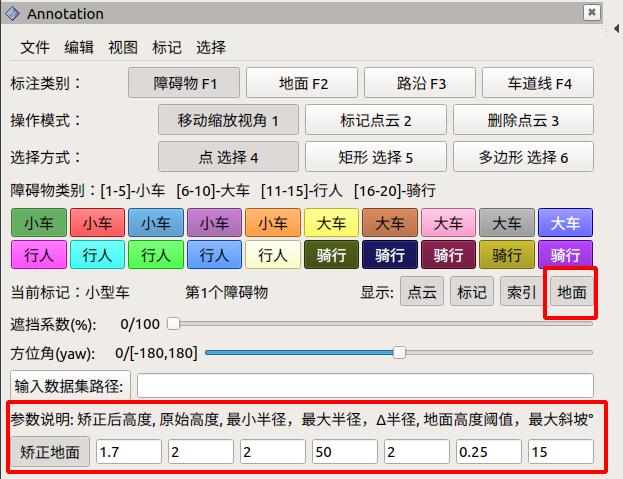
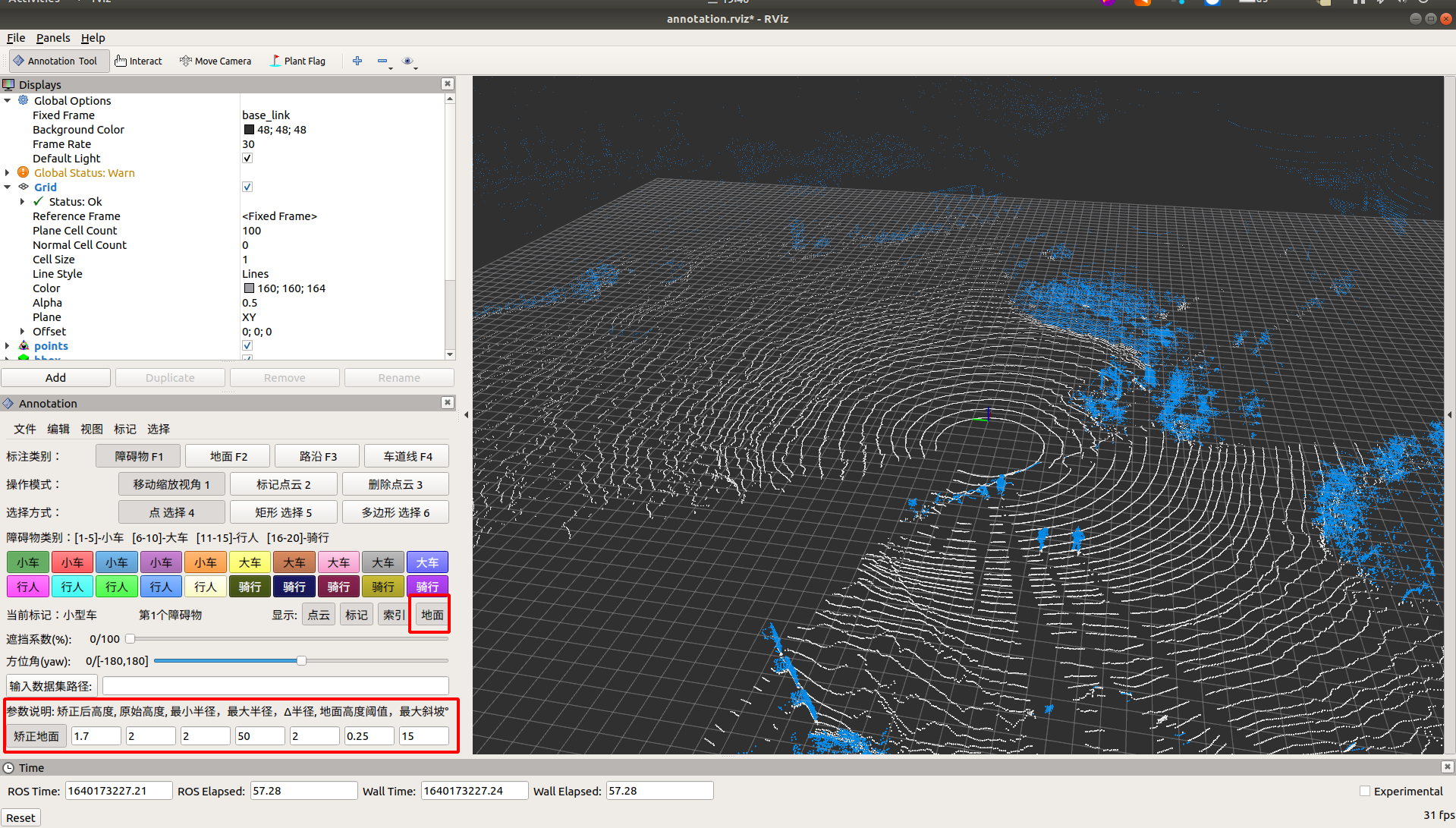
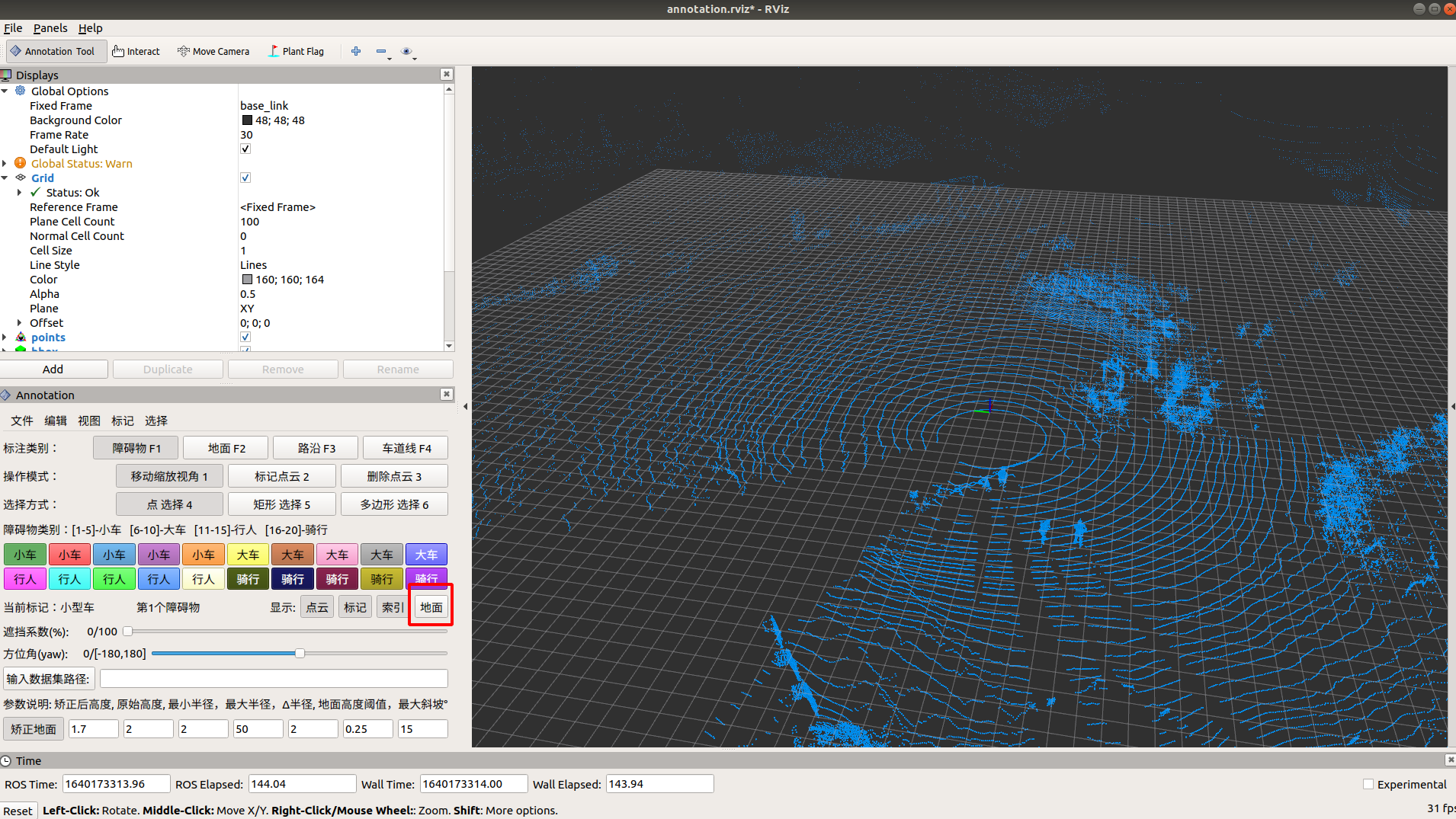
(4) 地面
地面是一帧点云中比较关键的部分,一般选择使用多边形进行选择标注,边界为之前标注的路沿。
地面可以分多次标注,拼接生成;如果一次选点过多,地面生成时间会较长。
*在2.4.0版本之后,标注工具增加了地面辅助标记功能:用户每次选择`地面(F2)`按钮时,系统会自动生成95%的地面,用户在此基础上进行细节修改,
得到最终的地面标注。
3.标注结果
Result路径说明

3D框label

IV、注意事项
1. 标注工具使用过程中如果遇见问题,或者代码部分有疑问,编辑需要,联系 @杜文文(18355180339 / [email protected])
2. 视频教程:
A`https://v.youku.com/v_show/id_XNDYxNjY4MDExMg==.html?spm=a2h0k.11417342.soresults.dtitle`
B`https://v.youku.com/v_show/id_XNDYxNjY4MDI5Mg==.html?spm=a2hzp.8244740.0.0`
V、版权说明
- 软件版权 本标注工具的版权归WenwenDu所有
- 其他版权 本标注工具在 RIMLab 开源标注工具 rviz_cloud_annotation 上改进完成:
https://github.com/RMonica/rviz_cloud_annotation
原始版权说明:
Original Copyright:
/*
* Copyright (c) 2016-2017, Riccardo Monica
* RIMLab, Department of Engineering and Architecture
* University of Parma, Italy
* http://www.rimlab.ce.unipr.it/
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
*
* 3. Neither the name of the copyright holder nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*/

 According to the definition of bbox label u provided in 'image/s5.png', the object of interest can be described by its size (length, width, height), location (x_c, y_c, z_c), theta and alpha. However, I have three question about the definition of bbox label:
According to the definition of bbox label u provided in 'image/s5.png', the object of interest can be described by its size (length, width, height), location (x_c, y_c, z_c), theta and alpha. However, I have three question about the definition of bbox label:





 4 Aug 2, 2022
4 Aug 2, 2022
 77 Jan 5, 2023
77 Jan 5, 2023
 13 Aug 18, 2022
13 Aug 18, 2022
 3 Aug 17, 2022
3 Aug 17, 2022
 5 Jun 27, 2022
5 Jun 27, 2022
 405 Jan 4, 2023
405 Jan 4, 2023
 36 Jan 5, 2023
36 Jan 5, 2023
 305 Dec 16, 2022
305 Dec 16, 2022
 118 Dec 6, 2022
118 Dec 6, 2022
 101 Dec 1, 2022
101 Dec 1, 2022
 3 Sep 30, 2021
3 Sep 30, 2021
 3 Dec 2, 2022
3 Dec 2, 2022
 26 Nov 4, 2022
26 Nov 4, 2022
 305 Dec 19, 2022
305 Dec 19, 2022
 149 Jan 4, 2023
149 Jan 4, 2023
 52 Nov 20, 2022
52 Nov 20, 2022
 12 Dec 7, 2022
12 Dec 7, 2022
 83 May 11, 2022
83 May 11, 2022
 10 Jan 1, 2023
10 Jan 1, 2023