11 Repositories
Python pointcloud Libraries
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023
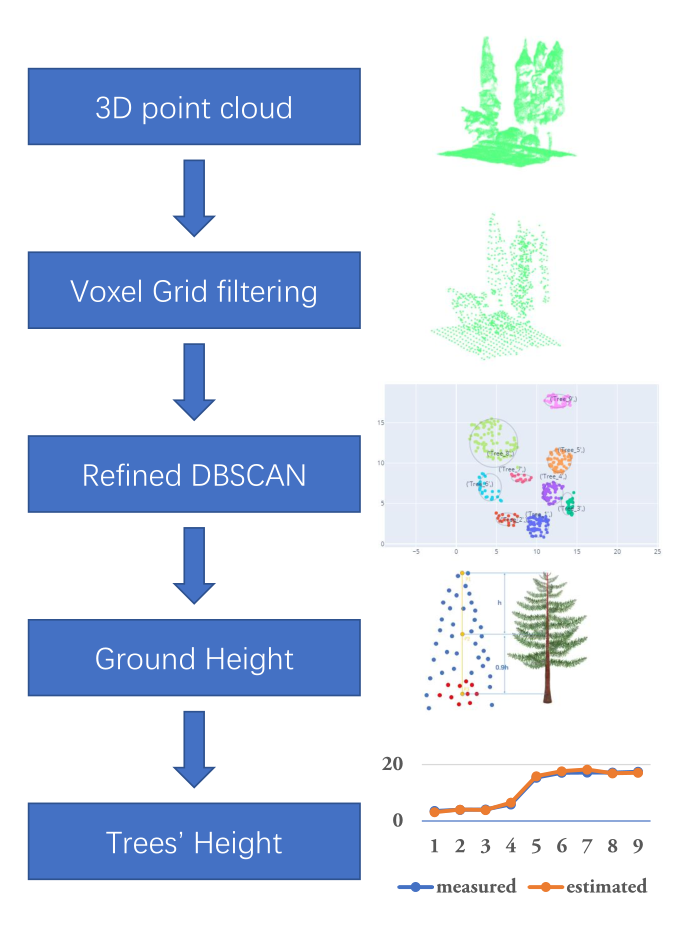
A simple algorithm for extracting tree height in sparse scene from point cloud data.
TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING This is the offical python implementation of the paper "Tree Height Extraction in
 6 Oct 28, 2022
6 Oct 28, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

A robust camera and Lidar fusion based velocity estimator to undistort the pointcloud.
Lidar with Velocity A robust camera and Lidar fusion based velocity estimator to undistort the pointcloud. related paper: Lidar with Velocity : Motion
 164 Dec 30, 2022
164 Dec 30, 2022

Source code of generalized shuffled linear regression
Generalized-Shuffled-Linear-Regression Code for the ICCV 2021 paper: Generalized Shuffled Linear Regression. Authors: Feiran Li, Kent Fujiwara, Fumio
 7 Oct 26, 2022
7 Oct 26, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

A robust pointcloud registration pipeline based on correlation.
PHASER: A Robust and Correspondence-Free Global Pointcloud Registration Ubuntu 18.04+ROS Melodic: Overview Pointcloud registration using correspondenc
 101 Dec 1, 2022
101 Dec 1, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022

PointCloud Annotation Tools, support to label object bound box, ground, lane and kerb
PointCloud Annotation Tools, support to label object bound box, ground, lane and kerb
 368 Dec 6, 2022
368 Dec 6, 2022
![[PyTorch] Official implementation of CVPR2021 paper](https://github.com/XuyangBai/PointDSC/raw/master/figures/pipeline.png)
[PyTorch] Official implementation of CVPR2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency". https://arxiv.org/abs/2103.05465
PointDSC repository PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency",
 153 Dec 14, 2022
153 Dec 14, 2022
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering This repository holds all the code and data for our recent work on
 118 Dec 6, 2022
118 Dec 6, 2022