Preference-Planning-Deep-IRL

Introduction
Dependencies
Gym
stable-baselines3
PyTorch
Usage
Take Demonstration
python3 record.py configs/[Env Name]
Train
python3 main.py configs/[Env Name]
Test
python3 test.py configs/[Env Name]
Gym
stable-baselines3
PyTorch
python3 record.py configs/[Env Name]
python3 main.py configs/[Env Name]
python3 test.py configs/[Env Name]
PG-MORL This repository contains the implementation for the paper Prediction-Guided Multi-Objective Reinforcement Learning for Continuous Robot Contro
SMU A Tensorflow Implementation of SMU: SMOOTH ACTIVATION FUNCTION FOR DEEP NETWORKS USING SMOOTHING MAXIMUM TECHNIQUE arXiv https://arxiv.org/abs/211
Reinforcement Learning with Q Learning Algorithm Q learning algorithm is trained on the gym's frozen lake environment. Libraries Used gym Numpy tqdm P
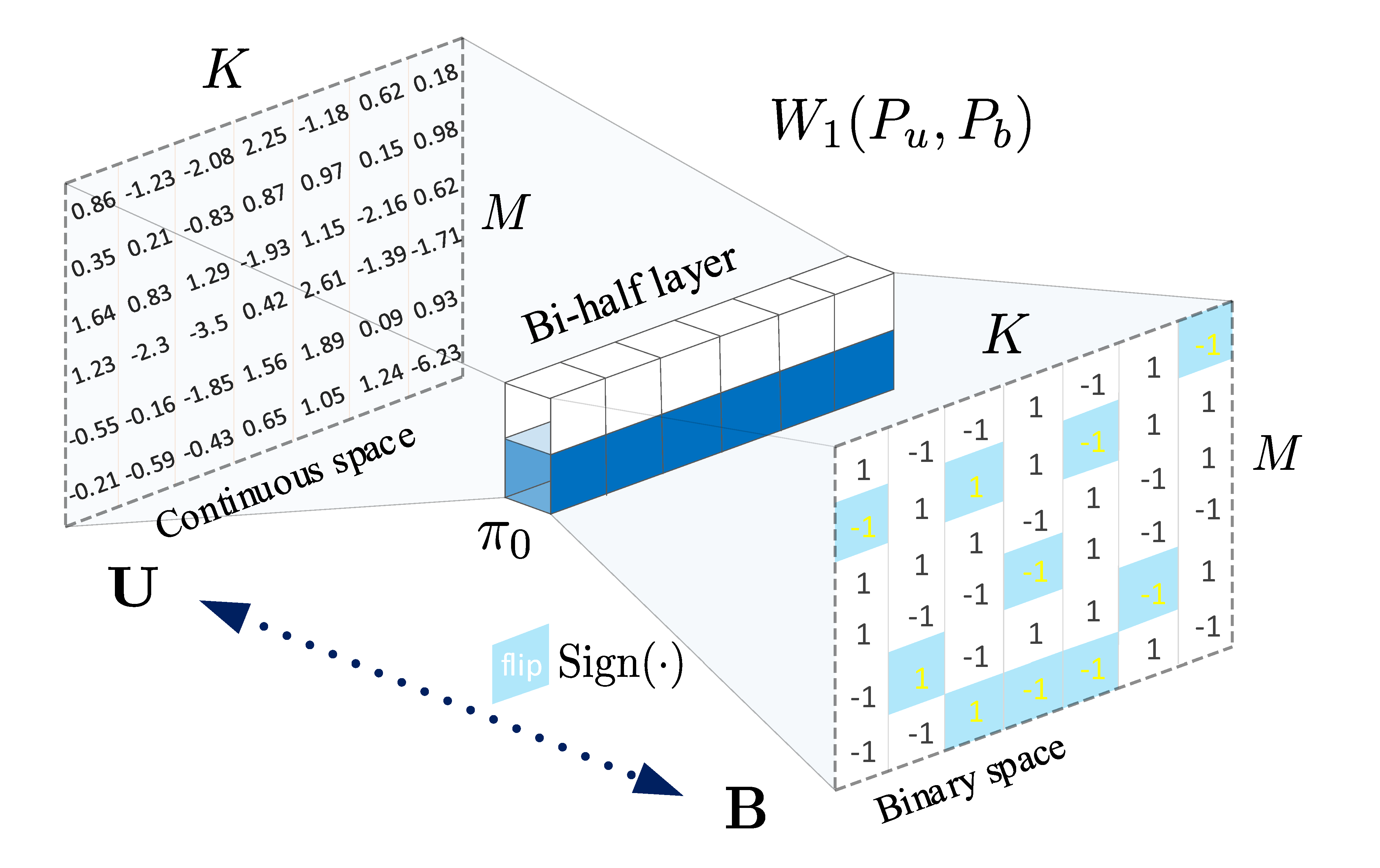
Deep Unsupervised Image Hashing by Maximizing Bit Entropy This is the PyTorch implementation of accepted AAAI 2021 paper: Deep Unsupervised Image Hash
A small demonstration of using WebDataset with ImageNet and PyTorch Lightning
A small demonstration of using WebDataset with ImageNet and PyTorch Lightning This is a small repo illustrating how to use WebDataset on ImageNet. usi
A geometric deep learning pipeline for predicting protein interface contacts.
Self-Supervised Reward Regression (SSRR) Codebase for CoRL 2021 paper "Learning from Suboptimal Demonstration via Self-Supervised Reward Regression "
robomimic [Homepage] [Documentation] [Study Paper] [Study Website] [ARISE Initiative] Latest Updates [08/09/2021] v0.1.0: Initial code and pap
Maximum Entropy Generators for Energy-Based Models All experiments have tensorboard visualizations for samples / density / train curves etc. To run th
V-MPO Simple code to demonstrate Deep Reinforcement Learning by using an on-policy adaptation of Maximum a Posteriori Policy Optimization (MPO) in Pyt
page_type languages products description sample python azure azure-machine-learning-service azure-devops Code which demonstrates how to set up and ope
Exact Pareto Optimal solutions for preference based Multi-Objective Optimization
B-Pref Official codebase for B-Pref: Benchmarking Preference-BasedReinforcement Learning contains scripts to reproduce experiments. Install conda env
PAML PyTorch implementation of the paper: "Preference-Adaptive Meta-Learning for Cold-Start Recommendation", IJCAI, 2021. (Continuously updating ) Int
On the model-based stochastic value gradient for continuous reinforcement learning This repository is by Brandon Amos, Samuel Stanton, Denis Yarats, a
TextWorld A text-based game generator and extensible sandbox learning environment for training and testing reinforcement learning (RL) agents. Also ch
Code for On the Anatomy of MCMC-Based Maximum Likelihood Learning of Energy-Based Models This repository will reproduce the main results from our pape
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
![[ICML 2020] Prediction-Guided Multi-Objective Reinforcement Learning for Continuous Robot Control](https://github.com/mit-gfx/PGMORL/raw/master/images/teaser.gif)
 65 Jan 7, 2023
65 Jan 7, 2023
 5 Jan 18, 2022
5 Jan 18, 2022
 1 Nov 10, 2021
1 Nov 10, 2021
 62 Dec 30, 2022
62 Dec 30, 2022
 50 Dec 16, 2022
50 Dec 16, 2022
 50 Dec 16, 2022
50 Dec 16, 2022
 44 Dec 30, 2022
44 Dec 30, 2022
 19 Dec 12, 2022
19 Dec 12, 2022

 178 Jan 5, 2023
178 Jan 5, 2023

 135 Oct 27, 2022
135 Oct 27, 2022
 9 Jun 6, 2022
9 Jun 6, 2022
 1 Nov 1, 2021
1 Nov 1, 2021
 40 Dec 24, 2022
40 Dec 24, 2022
 48 Dec 20, 2022
48 Dec 20, 2022
 15 Nov 18, 2022
15 Nov 18, 2022
 46 Dec 15, 2022
46 Dec 15, 2022
 983 Dec 23, 2022
983 Dec 23, 2022
 32 Nov 25, 2022
32 Nov 25, 2022
 187 Dec 24, 2022
187 Dec 24, 2022