AquaTimer - Programmable Timer for Aquariums based on ATtiny414/814/1614
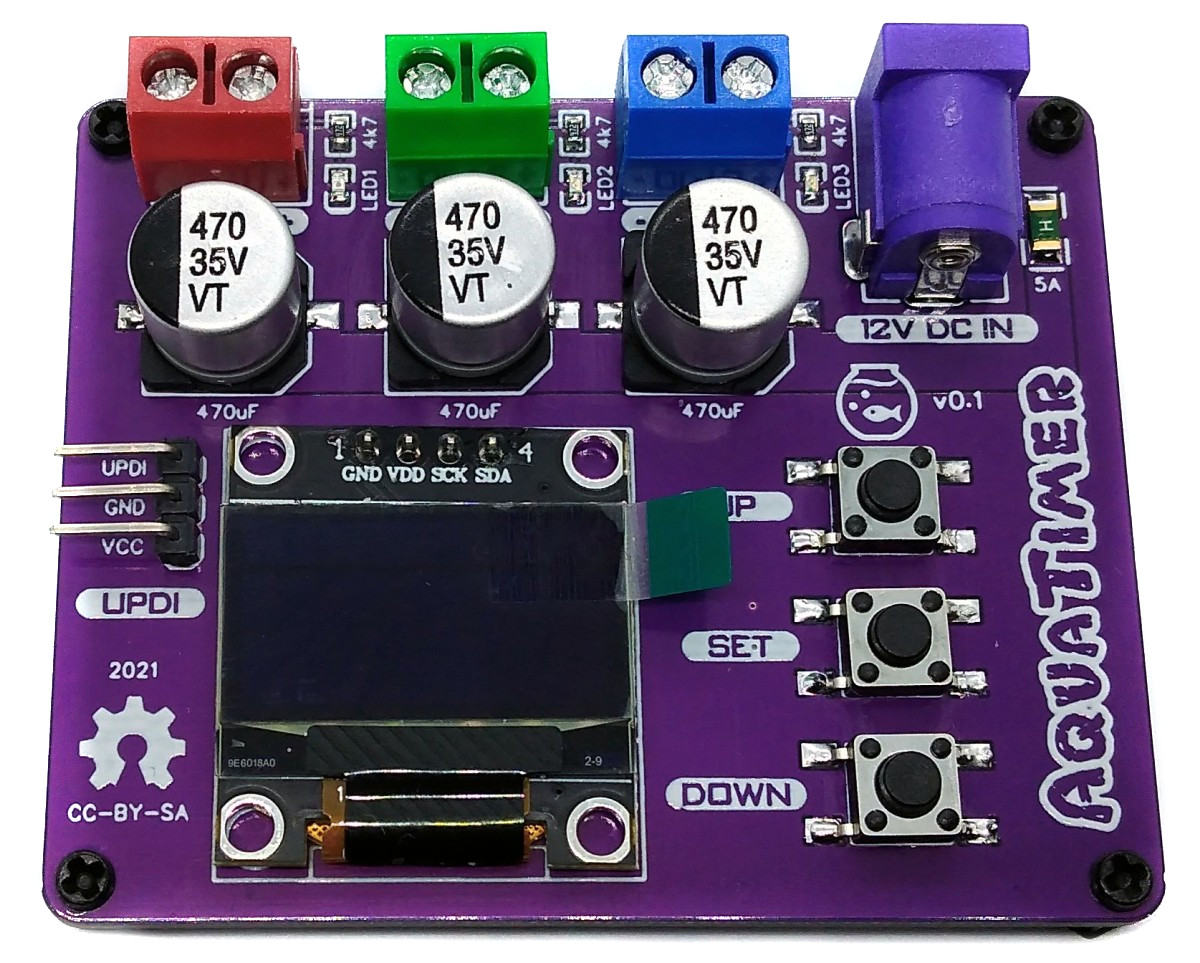
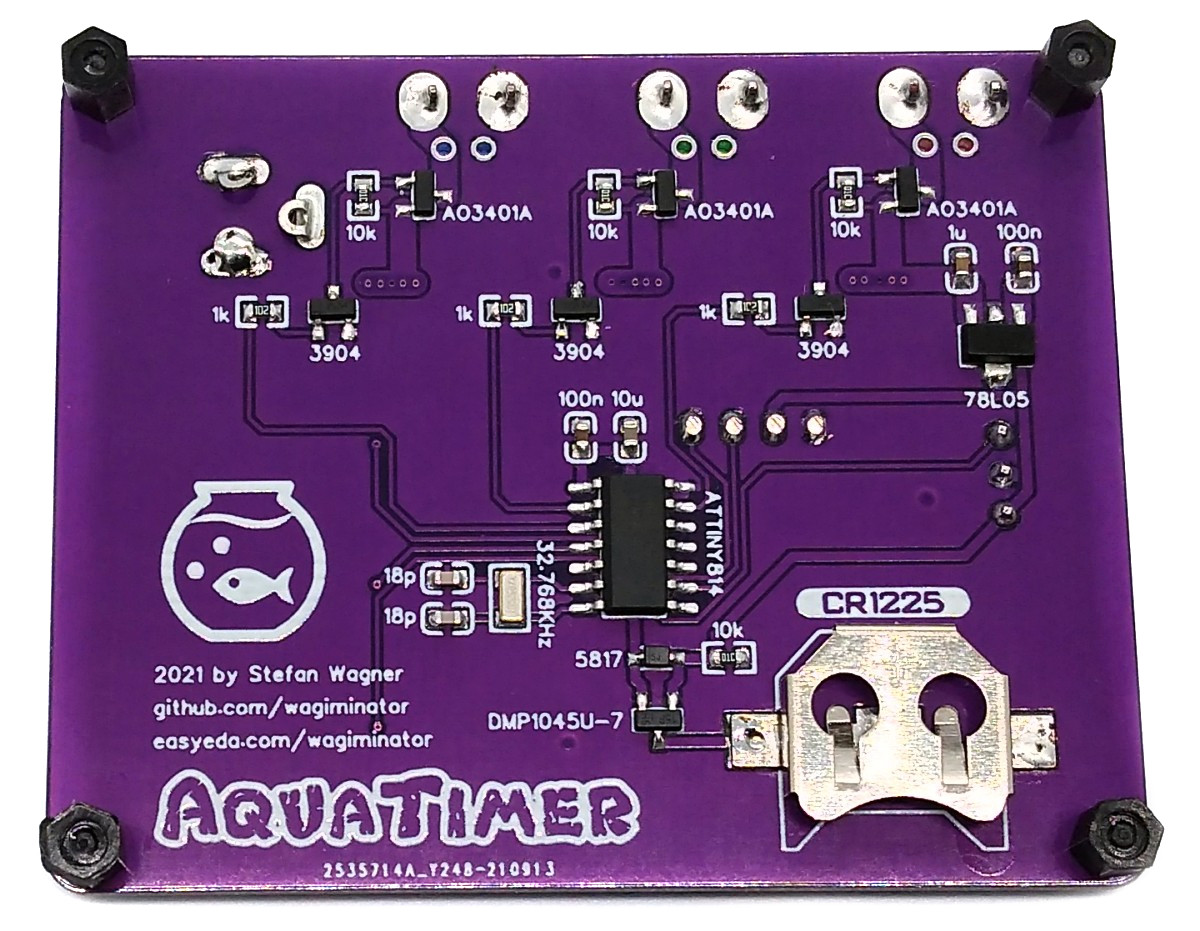
AquaTimer is a programmable timer for 12V devices such as lighting, solenoid valves or pumps not only for aquariums. It has three switchable channels for currents up to 2A each and up to 5A in total. Connected lighting can be dimmed if desired and slowly faded in and out to simulate sunrises and sunsets. The internal RTC of the ATtiny is used as a clockwork in conjunction with a 32.768kHz crystal. A backup battery keeps the clock running even if the external power supply is interrupted. Settings are made using three buttons and the OLED display.
- Design Files (EasyEDA): https://easyeda.com/wagiminator/attiny814-aquacontroller
Compiling and Uploading the Firmware
If using the Arduino IDE
- Open your Arduino IDE.
- Make sure you have installed megaTinyCore.
- Go to Tools -> Board -> megaTinyCore and select ATtiny1614/1604/814/804/414/404/214/204.
- Go to Tools and choose the following board options:
- Chip: ATtiny1614 or ATtiny814 or ATtiny414
- Clock: 5 MHz internal
- Leave the rest at the default settings.
- Connect your programmer to your PC and to the UPDI header on the board.
- Go to Tools -> Programmer and select your UPDI programmer.
- Go to Tools -> Burn Bootloader to burn the fuses.
- Open the sketch and click Upload.
If using the makefile (Linux/Mac)
- Connect your programmer (jtag2updi or SerialUPDI) to your PC and to the UPDI header on the board.
- Download AVR 8-bit Toolchain and extract the sub-folders (avr, bin, include, ...) to /software/tools/avr-gcc. To do this, you have to register for free with Microchip on the download site.
- Open the makefile and set the programmer and port (default is serialupdi on /dev/ttyUSB0).
- Open a terminal.
- Navigate to the folder with the makefile and the sketch.
- Run "make install" to compile, burn the fuses and upload the firmware.
The device time is automatically set to the current time (compilation time) when the firmware is uploaded. Install the CR1220, CR1225 or LIR1220 (recommended) buffer battery before disconnecting the device.
Operating Instructions
- Connect the devices to be controlled to the AquaTimer using the screw terminals. Pay attention to the correct polarity!
- Connect the AquaTimer to a 12V power supply via the DC barrel connector.
- Press the "SET" button to get to the main menu. Adjust the values according to your wishes.
References, Links and Notes


License

This work is licensed under Creative Commons Attribution-ShareAlike 3.0 Unported License. (http://creativecommons.org/licenses/by-sa/3.0/)

 40 Sep 14, 2022
40 Sep 14, 2022
 57 Nov 17, 2022
57 Nov 17, 2022
 16 Jan 16, 2022
16 Jan 16, 2022

 1.3k Nov 17, 2022
1.3k Nov 17, 2022

 49 Nov 23, 2022
49 Nov 23, 2022

 50 Dec 3, 2022
50 Dec 3, 2022
 185 Dec 26, 2022
185 Dec 26, 2022
 336 Nov 25, 2022
336 Nov 25, 2022

 43 Nov 19, 2022
43 Nov 19, 2022

 66 Dec 13, 2022
66 Dec 13, 2022
 32 Nov 25, 2022
32 Nov 25, 2022
 139 Jan 1, 2023
139 Jan 1, 2023
 62 Dec 24, 2022
62 Dec 24, 2022
 52 Nov 30, 2022
52 Nov 30, 2022
 7 Sep 26, 2022
7 Sep 26, 2022
 13 Nov 4, 2022
13 Nov 4, 2022
 2 Feb 15, 2022
2 Feb 15, 2022
 3 Mar 11, 2022
3 Mar 11, 2022
 6.3k Dec 30, 2022
6.3k Dec 30, 2022