TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING
This is the offical python implementation of the paper "Tree Height Extraction in Sparse Scenes Based on UAV Remote Sensing," by Y. Liu, M. Xing, X. Zhou, Y. Song and D. Wang. For more information, checkout the IGARSS2020 oral paper.
Description
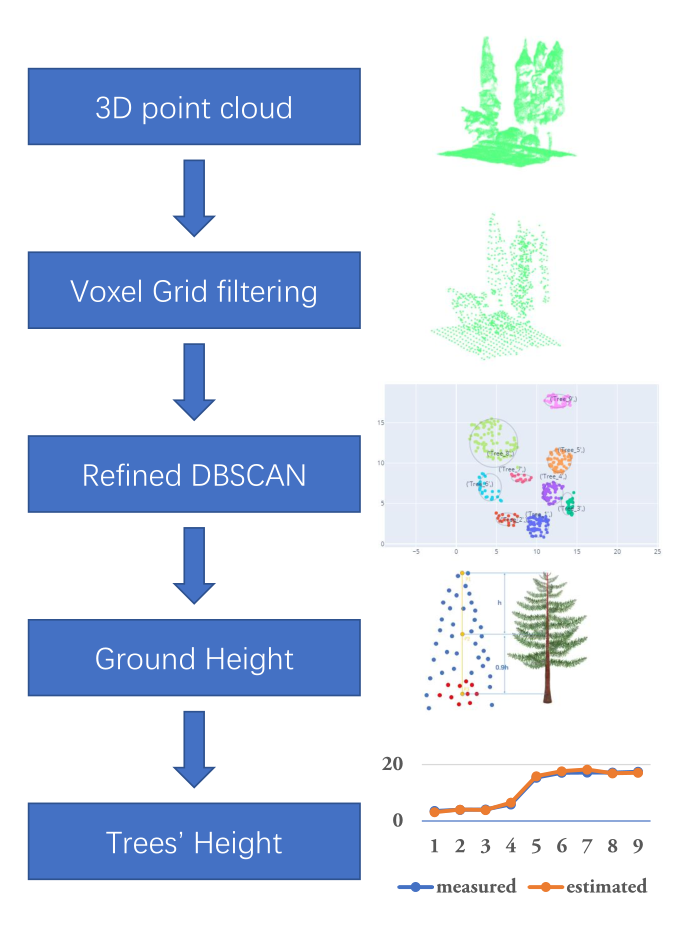
A simple algorithm for extracting tree height in sparse scene from point cloud data.
Requirements
- python3
- pip install numpy scipy matplotlib plotly
- python-pcl
If you have python-pcl installation problems, you can try the ".whl" file in the floder "python-pcl/"
Tested Environment
I have tested the code in the following environment:
- Windows10-64bit
- Anaconda python3.7
Make sure anaconda has been installed on your windows computer, use the following command:
conda create -n py37 python=3.7
conda activate py37
pip install python_pcl-0.3.0rc1-cp37-cp37m-win_amd64.whl
conda install -c plotly plotly-orca==1.2.1 psutil requests
pip install numpy scipy matplotlib
ImportError: DLL load failed
If you meet "ImportError: DLL load failed" problem when you try to "import pcl", that was because "OpenNI2.dll" missing.
To fix this, I provide you with "python-pcl/OpenNI2.dll", just copy "OpenNI2.dll" into folder "YOUR_ANACONDA3_FLODER\envs\py37\lib\site-packages\pcl".
Run
python main.py
Citation
If you use this code or ideas from the paper for your research, please cite our paper:
@inproceedings{liu2020tree,
title={Tree Height Extraction in Sparse Scenes Based on UAV Remote Sensing},
author={Liu, Yuanzhong and Xing, Minfeng and Zhou, Xiaozhe and Song, Yang and Wang, Danyang},
booktitle={IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium},
pages={6499--6502},
year={2020},
organization={IEEE}
}

 302 Dec 14, 2022
302 Dec 14, 2022

 182 Dec 30, 2022
182 Dec 30, 2022

 114 Nov 30, 2022
114 Nov 30, 2022

 34 Nov 30, 2022
34 Nov 30, 2022

 151 Dec 26, 2022
151 Dec 26, 2022

 115 Jan 4, 2023
115 Jan 4, 2023

 62 Jan 3, 2023
62 Jan 3, 2023
 11 Oct 14, 2022
11 Oct 14, 2022
![[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion](https://github.com/rulixiang/CorrFusionNet/raw/master/figures/corrfusion.png)
 33 Dec 12, 2022
33 Dec 12, 2022

 42 Jul 25, 2022
42 Jul 25, 2022
 3.7k Jan 3, 2023
3.7k Jan 3, 2023
 43 Dec 5, 2022
43 Dec 5, 2022
 119 Jan 2, 2023
119 Jan 2, 2023
 63 Dec 9, 2022
63 Dec 9, 2022
 78 Dec 27, 2022
78 Dec 27, 2022
 65 Dec 26, 2022
65 Dec 26, 2022
 1 Feb 7, 2022
1 Feb 7, 2022
 17 Mar 2, 2022
17 Mar 2, 2022