YOLOX-ROS
YOLOX + ROS2 Foxy (cuda 10.2)
NVIDIA Graphics is required

Japanese Reference (Plan to post):Qiita
Requirements (Python)
- ROS2 Foxy
- CUDA 10.2
- OpenCV 4.5.1
- Python 3.8 (Ubuntu 20.04 Default)
- Torch '1.9.0+cu102 (Install with pytorch)
- cuDNN 7.6.5 (Install with pytorch)
- YOLOX
- TensorRT : is not supported
- WebCamera : v4l2_camera
Requirements (C++)
- C++ is not supported
Installation
Install the dependent packages based on all tutorials.
STEP 1 : CUDA Installation
STEP 2 : YOLOX Quick-start
git clone https://github.com/Megvii-BaseDetection/YOLOX.git
cd YOLOX
pip3 install -U pip && pip3 install -r requirements.txt
pip3 install -v -e . # or python3 setup.py develop
pip3 install cython; pip3 install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
STEP 3 : Install YOLOX-ROS
source /opt/ros/foxy/setup.bash
sudo apt install ros-foxy-v4l2-camera
git clone --recursive https://github.com/Ar-Ray-code/yolox_ros.git ~/ros2_ws/src/yolox_ros/
cd ~/ros2_ws
colcon build --symlink-install # weights files will be installed automatically.
Demo
Connect your web camera.
source ~/ros2_ws/install/setup.bash
# Example 1 : YOLOX-s demo
ros2 launch yolox_ros_py demo_yolox_s.launch.py
# Example 2 : YOLOX-l demo
ros2 launch yolox_ros_py demo_yolox_l.launch.py
Topic
Subscribe
- image_raw (
sensor_msgs/Image)
Publish
-
yolox/image_raw : Resized image (
sensor_msgs/Image) -
yololx/bounding_boxes : Output BoundingBoxes like darknet_ros_msgs (
bboxes_ex_msgs/BoundingBoxes)※ If you want to use
darknet_ros_msgs, replacebboxes_ex_msgswithdarknet_ros_msgs.

Parameters : default
- image_size/width: 640
- image_size/height: 480
- yolo_type : 'yolox-s'
- fuse : False
- trt : False
- rank : 0
- ckpt_file :
/home/ubuntu/ros2_ws/src/yolox_ros/weights/yolox_s.pth.tar - conf : 0.3
- nmsthre : 0.65
- img_size : 640
Reference
![]()
@article{yolox2021,
title={YOLOX: Exceeding YOLO Series in 2021},
author={Ge, Zheng and Liu, Songtao and Wang, Feng and Li, Zeming and Sun, Jian},
journal={arXiv preprint arXiv:2107.08430},
year={2021}
}
About writer
- Ar-Ray : Japanese student.
- Blog (Japanese) : https://ar-ray.hatenablog.com/
- Twitter : https://twitter.com/Ray255Ar

 l
l





 I've tried using the Dockerfile for Jetson Nano found in the yolox_ros_cpp folder, but the build fails at the 19th and 21st build commands (installing the onnxoptimizer from git and installing YOLOX from git) - if you have this image hosted on Dockerhub, I should be able to test and see if that will work by just downloading the built image.
I've tried using the Dockerfile for Jetson Nano found in the yolox_ros_cpp folder, but the build fails at the 19th and 21st build commands (installing the onnxoptimizer from git and installing YOLOX from git) - if you have this image hosted on Dockerhub, I should be able to test and see if that will work by just downloading the built image.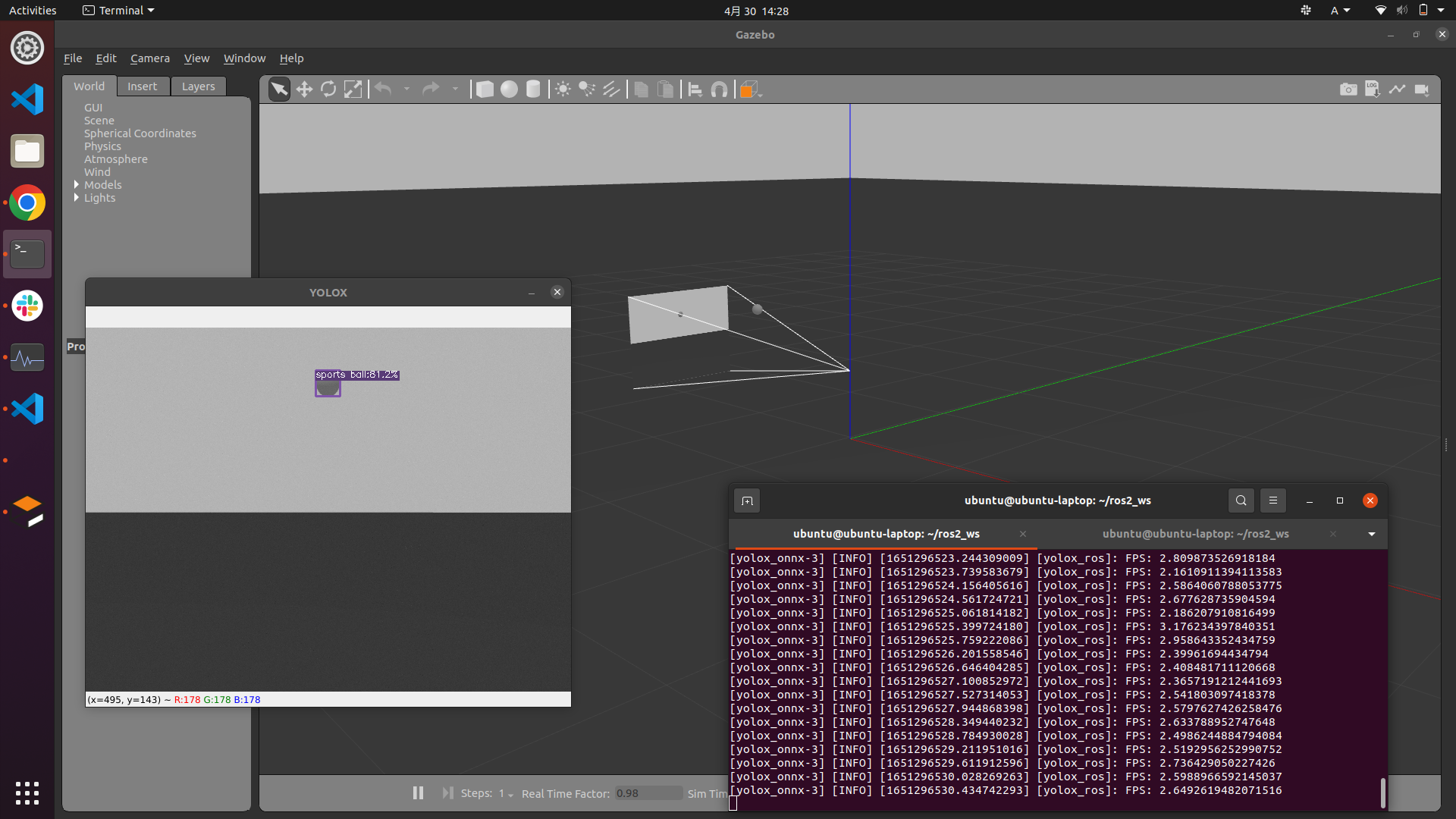

 6 Dec 18, 2022
6 Dec 18, 2022
 16 Nov 18, 2022
16 Nov 18, 2022
 5 Oct 18, 2022
5 Oct 18, 2022
 245 Dec 26, 2022
245 Dec 26, 2022
 13 Nov 26, 2022
13 Nov 26, 2022
 5 Dec 10, 2022
5 Dec 10, 2022
 3 Jan 26, 2022
3 Jan 26, 2022
 7.7k Jan 3, 2023
7.7k Jan 3, 2023
 77 Nov 22, 2022
77 Nov 22, 2022
 21 Dec 28, 2022
21 Dec 28, 2022
 91 Dec 26, 2022
91 Dec 26, 2022
 18 Aug 18, 2022
18 Aug 18, 2022
 148 Jan 3, 2023
148 Jan 3, 2023
 33 Dec 28, 2022
33 Dec 28, 2022
 5 Jun 8, 2022
5 Jun 8, 2022
 3 Feb 25, 2022
3 Feb 25, 2022
 9 Aug 22, 2022
9 Aug 22, 2022
 41 Nov 23, 2022
41 Nov 23, 2022
 19 Oct 8, 2022
19 Oct 8, 2022