After I trained on my own dataset with width 800 height 480 without checkpoint successfully, I fill in the checkpoint parameter and tried the test image and this error showed up. The exact error is like this:
Traceback (most recent call last): File "train", line 55, in net = load_model(opt.checkpoint) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\saving.py", line 419, in load_model model = _deserialize_model(f, custom_objects, compile) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\saving.py", line 225, in deserialize_model model = model_from_config(model_config, custom_objects=custom_objects) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\saving.py", line 458, in model_from_config return deserialize(config, custom_objects=custom_objects) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\layers_init.py", line 55, in deserialize printable_module_name='layer') File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\utils\generic_utils.py", line 145, in deserialize_keras_object list(custom_objects.items()))) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\network.py", line 1032, in from_config process_node(layer, node_data) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\network.py", line 991, in process_node layer(unpack_singleton(input_tensors), **kwargs) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\engine\base_layer.py", line 457, in call output = self.call(inputs, **kwargs) File "C:\DDDDZZZZYYYY\envs\kerass\lib\site-packages\keras\layers\core.py", line 687, in call return self.function(inputs, **arguments) File "C:\Users\In-Car DVR\Desktop\DZY-work\Keras-ICNet-master\model.py", line 195, in y = Lambda(lambda x: tf.image.resize_bilinear(x, size=(int(x.shape[1])//2, int(x.shape[2])//2)), name='data_sub2')(x) NameError: name 'tf' is not defined
The training process showed the same error when I put in the checkpoint parameters. Is the file in the output folder the checkpoint file? Or the checkpoint file is in some other locations?
Thanks in advance!



![[ERROR] StopIteration: index 117 is out of bounds for axis 1 with size 66](https://avatars.githubusercontent.com/u/7348817?v=4)






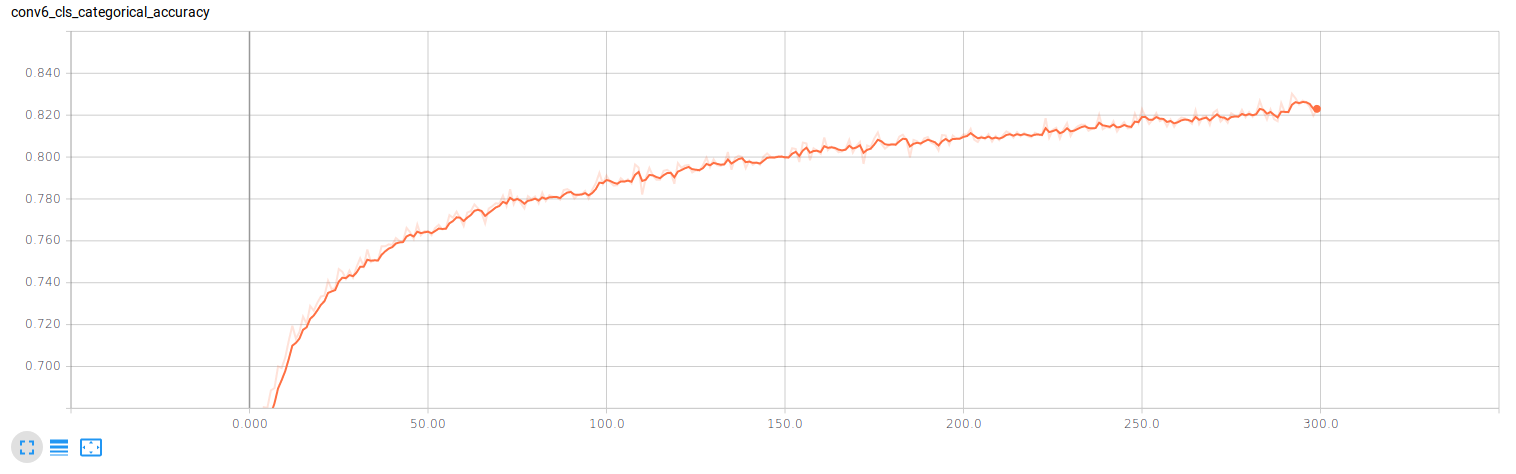
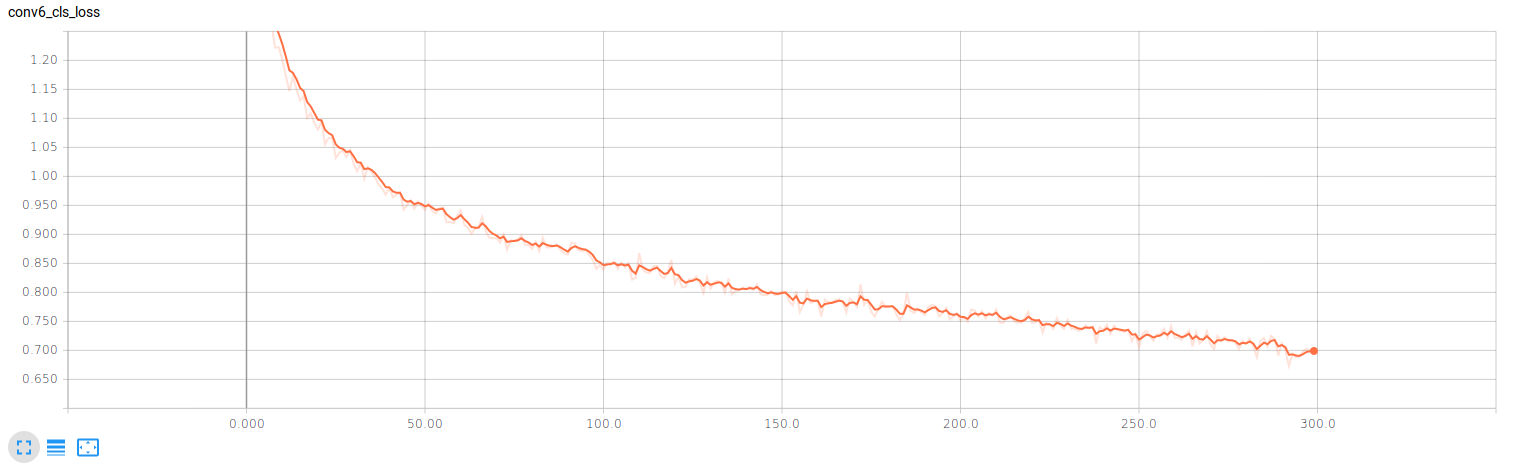
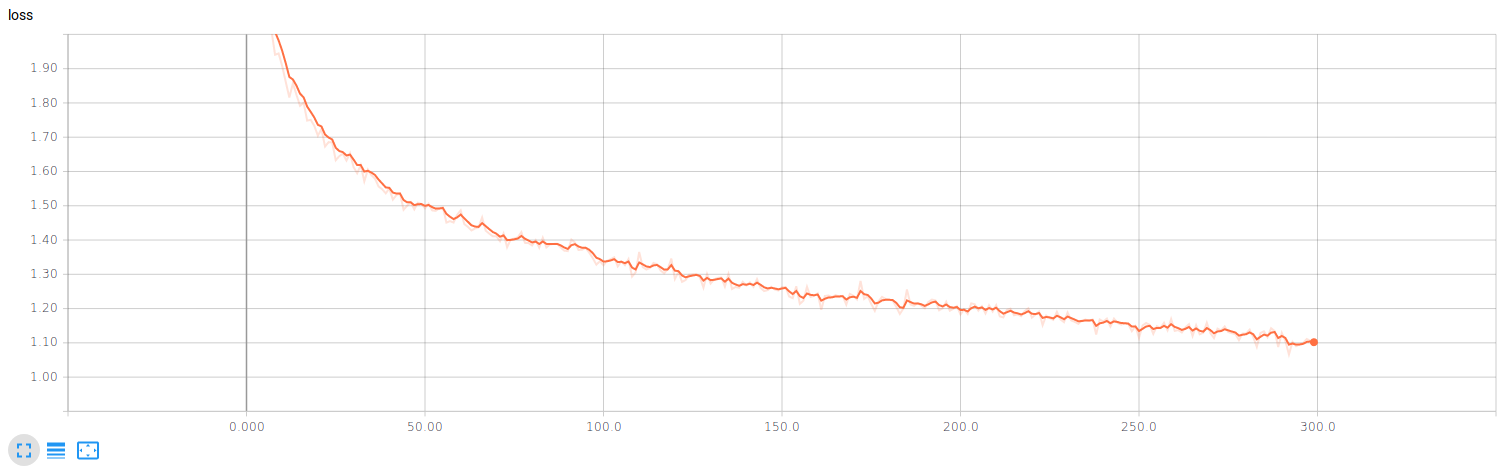
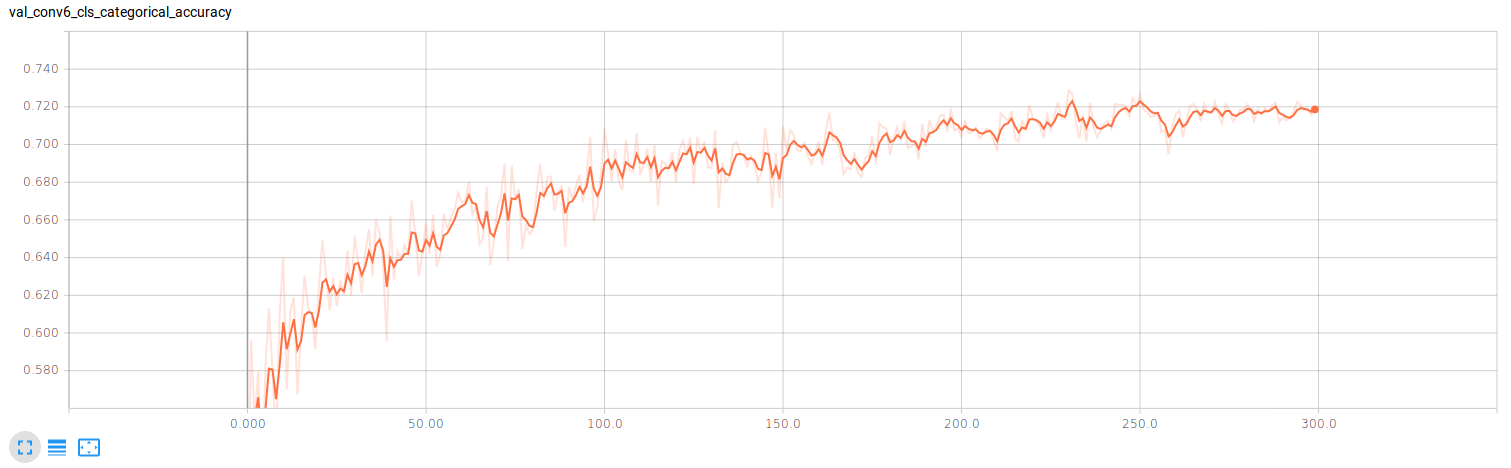
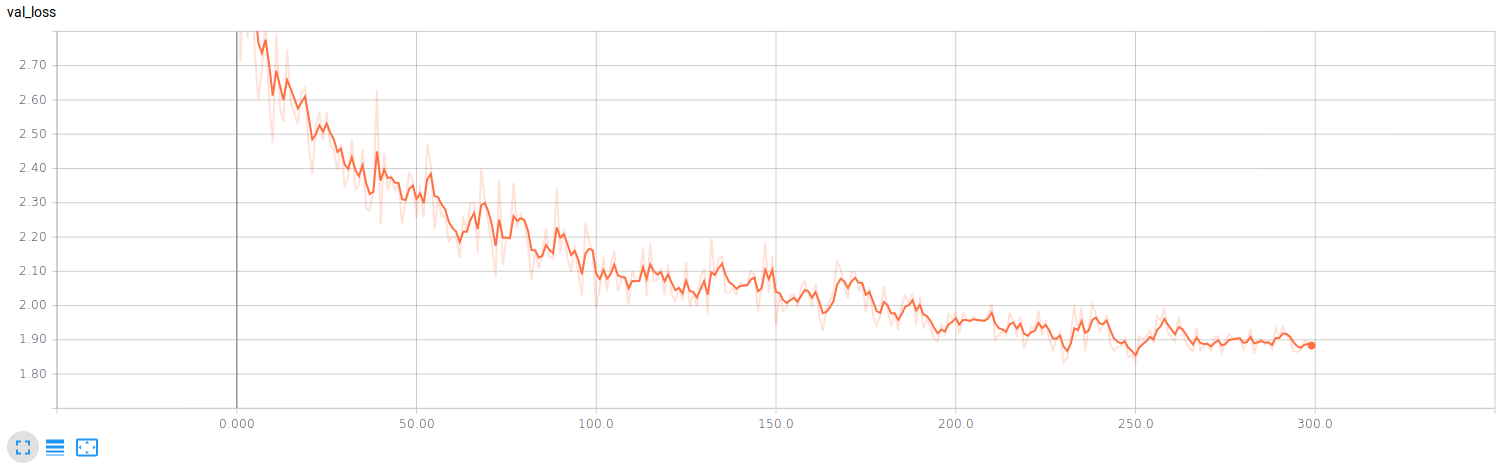
 , every new epoch loss fall from the beginning ,not from the last epoch , why does it happen ?
, every new epoch loss fall from the beginning ,not from the last epoch , why does it happen ?

 149 Dec 28, 2022
149 Dec 28, 2022
 6.1k Jan 3, 2023
6.1k Jan 3, 2023
 268 Nov 27, 2022
268 Nov 27, 2022
 182 Dec 14, 2022
182 Dec 14, 2022
 1.1k Jan 2, 2023
1.1k Jan 2, 2023
 1 Feb 15, 2022
1 Feb 15, 2022
 42 Nov 30, 2022
42 Nov 30, 2022
 4 Sep 23, 2022
4 Sep 23, 2022
 3 Nov 30, 2021
3 Nov 30, 2021
 32 Sep 21, 2022
32 Sep 21, 2022
 1 Feb 8, 2022
1 Feb 8, 2022
 44 Dec 27, 2022
44 Dec 27, 2022
 111 Dec 28, 2022
111 Dec 28, 2022
 906 Dec 30, 2022
906 Dec 30, 2022
 79 Nov 24, 2022
79 Nov 24, 2022
 135 Dec 19, 2022
135 Dec 19, 2022
 14 Sep 13, 2022
14 Sep 13, 2022
 7 Jan 24, 2022
7 Jan 24, 2022
 69 Oct 19, 2022
69 Oct 19, 2022