Dynamic Divide-and-Conquer Adversarial Training for Robust Semantic Segmentation
This is a pytorch project for the paper Dynamic Divide-and-Conquer Adversarial Training for Robust Semantic Segmentation by Xiaogang Xu, Hengshuang Zhao and Jiaya Jia presented at ICCV2021.
Introduction
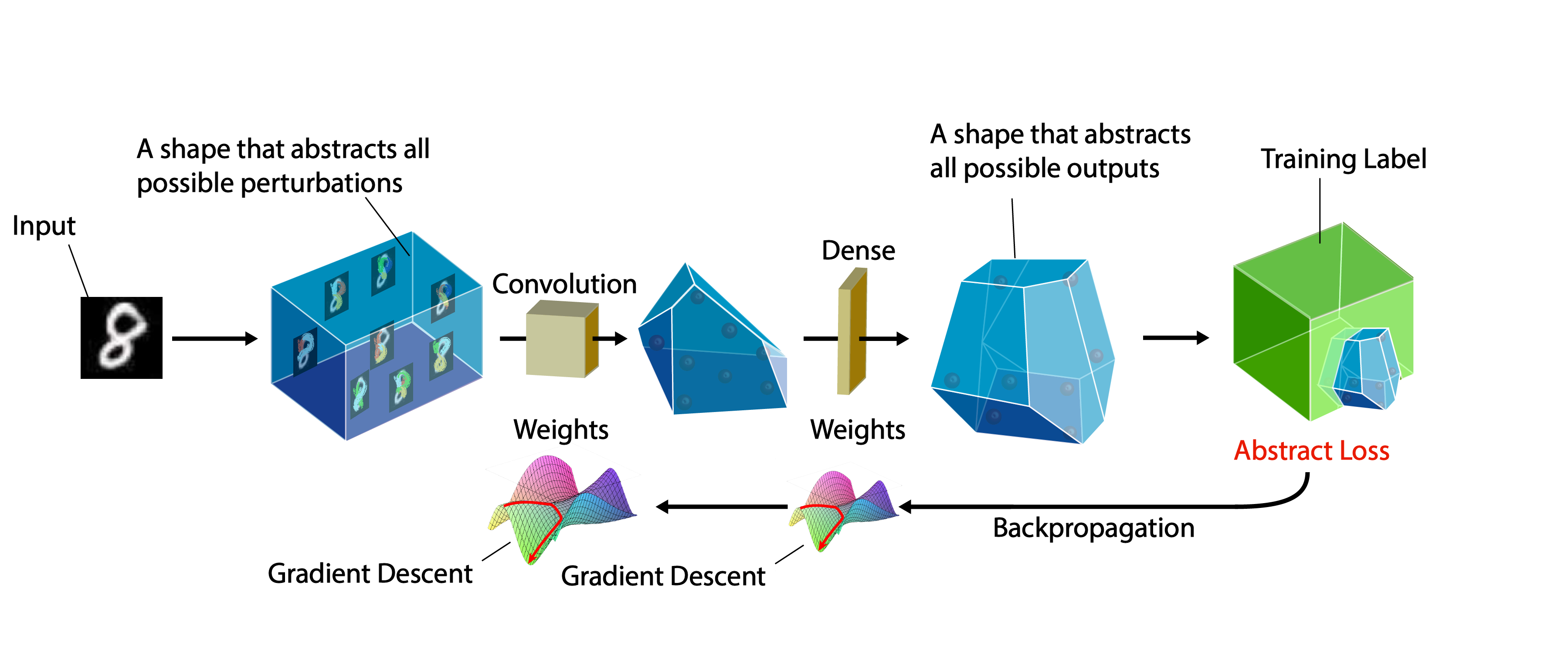
Adversarial training is promising for improving the robustness of deep neural networks towards adversarial perturbations, especially on the classification task. The effect of this type of training on semantic segmentation, contrarily, just commences. We make the initial attempt to explore the defense strategy on semantic segmentation by formulating a general adversarial training procedure that can perform decently on both adversarial and clean samples. We propose a dynamic divide-and-conquer adversarial training (DDC-AT) strategy to enhance the defense effect, by setting additional branches in the target model during training, and dealing with pixels with diverse properties towards adversarial perturbation. Our dynamical division mechanism divides pixels into multiple branches automatically. Note all these additional branches can be abandoned during inference and thus leave no extra parameter and computation cost. Extensive experiments with various segmentation models are conducted on PASCAL VOC 2012 and Cityscapes datasets, in which DDC-AT yields satisfying performance under both white- and black-box attacks.


Project Setup
For multiprocessing training, we use apex, tested with pytorch 1.0.1.
First install Python 3. We advise you to install Python 3 and PyTorch with Anaconda:
conda create --name py36 python=3.6
source activate py36
Clone the repo and install the complementary requirements:
cd $HOME
git clone --recursive [email protected]:dvlab-research/Robust_Semantic_Segmentation.git
cd Robust_Semantic_Segmentation
pip install -r requirements.txt
The environment of our experiments is CUDA10.2 and TITAN V. And you should install apex for training.
Requirement
- Hardware: 4-8 GPUs (better with >=11G GPU memory)
Train
- Download related datasets and you should modify the relevant paths specified in folder "config"
- Download ImageNet pre-trained models and put them under folder
initmodelfor weight initialization.
Cityscapes
- Train the baseline model with no defense on Cityscapes with PSPNet
sh tool_train/cityscapes/psp_train.sh - Train the baseline model with no defense on Cityscapes with DeepLabv3
sh tool_train/cityscapes/aspp_train.sh - Train the model with SAT on Cityscapes with PSPNet
sh tool_train/cityscapes/psp_train_sat.sh - Train the model with SAT on Cityscapes with DeepLabv3
sh tool_train/cityscapes/aspp_train_sat.sh - Train the model with DDCAT on Cityscapes with PSPNet
sh tool_train/cityscapes/psp_train_ddcat.sh - Train the model with DDCAT on Cityscapes with DeepLabv3
sh tool_train/cityscapes/aspp_train_ddcat.sh
VOC2012
- Train the baseline model with no defense on VOC2012 with PSPNet
sh tool_train/voc2012/psp_train.sh - Train the baseline model with no defense on VOC2012 with DeepLabv3
sh tool_train/voc2012/aspp_train.sh - Train the model with SAT on VOC2012 with PSPNet
sh tool_train/voc2012/psp_train_sat.sh - Train the model with SAT on VOC2012 with DeepLabv3
sh tool_train/voc2012/aspp_train_sat.sh - Train the model with DDCAT on VOC2012 with PSPNet
sh tool_train/voc2012/psp_train_ddcat.sh - Train the model with DDCAT on VOC2012 with DeepLabv3
sh tool_train/voc2012/aspp_train_ddcat.sh
You can use the tensorboardX to visualize the training loss, by
tensorboard --logdir=exp/path_to_log
Test
We provide the script for evaluation, reporting the miou on both clean and adversarial samples (the adversarial samples are obtained with attack whose n=2, epsilon=0.03 x 255, alpha=0.01 x 255)
Cityscapes
- Evaluate the PSPNet trained with no defense on Cityscapes
sh tool_test/cityscapes/psp_test.sh - Evaluate the PSPNet trained with SAT on Cityscapes
sh tool_test/cityscapes/psp_test_sat.sh - Evaluate the PSPNet trained with DDCAT on Cityscapes
sh tool_test/cityscapes/psp_test_ddcat.sh - Evaluate the DeepLabv3 trained with no defense on Cityscapes
sh tool_test/cityscapes/aspp_test.sh - Evaluate the DeepLabv3 trained with SAT on Cityscapes
sh tool_test/cityscapes/aspp_test_sat.sh - Evaluate the DeepLabv3 trained with DDCAT on Cityscapes
sh tool_test/cityscapes/aspp_test_ddcat.sh
VOC2012
- Evaluate the PSPNet trained with no defense on VOC2012
sh tool_test/voc2012/psp_test.sh - Evaluate the PSPNet trained with SAT on VOC2012
sh tool_test/voc2012/psp_test_sat.sh - Evaluate the PSPNet trained with DDCAT on VOC2012
sh tool_test/voc2012/psp_test_ddcat.sh - Evaluate the DeepLabv3 trained with no defense on VOC2012
sh tool_test/voc2012/aspp_test.sh - Evaluate the DeepLabv3 trained with SAT on VOC2012
sh tool_test/voc2012/aspp_test_sat.sh - Evaluate the DeepLabv3 trained with DDCAT on VOC2012
sh tool_test/voc2012/aspp_test_ddcat.sh
Pretrained Model
You can download the pretrained models from https://drive.google.com/file/d/120xLY_pGZlm3tqaLxTLVp99e06muBjJC/view?usp=sharing
Cityscapes with PSPNet
The model trained with no defense: pretrain/cityscapes/pspnet/no_defense
The model trained with SAT: pretrain/cityscapes/pspnet/sat
The model trained with DDCAT: pretrain/cityscapes/pspnet/ddcat
Cityscapes with DeepLabv3
The model trained with no defense: pretrain/cityscapes/deeplabv3/no_defense
The model trained with SAT: pretrain/cityscapes/deeplabv3/sat
The model trained with DDCAT: pretrain/cityscapes/deeplabv3/ddcat
VOC2012 with PSPNet
The model trained with no defense: pretrain/voc2012/pspnet/no_defense
The model trained with SAT: pretrain/voc2012/pspnet/sat
The model trained with DDCAT: pretrain/voc2012/pspnet/ddcat
VOC2012 with DeepLabv3
The model trained with no defense: pretrain/voc2012/deeplabv3/no_defense
The model trained with SAT: pretrain/voc2012/deeplabv3/sat
The model trained with DDCAT: pretrain/voc2012/deeplabv3/ddcat
Citation Information
If you find the project useful, please cite:
@inproceedings{xu2021ddcat,
title={Dynamic Divide-and-Conquer Adversarial Training for Robust Semantic Segmentation},
author={Xiaogang Xu, Hengshuang Zhao and Jiaya Jia},
booktitle={ICCV},
year={2021}
}
Acknowledgments
This source code is inspired by semseg.
Contributions
If you have any questions/comments/bug reports, feel free to e-mail the author Xiaogang Xu ([email protected]).

 32 Sep 21, 2022
32 Sep 21, 2022

 12 Nov 9, 2022
12 Nov 9, 2022

 46 Dec 11, 2022
46 Dec 11, 2022

 69 Oct 13, 2022
69 Oct 13, 2022
 2 Feb 15, 2022
2 Feb 15, 2022

 21 Nov 28, 2022
21 Nov 28, 2022
![Dynamic Attentive Graph Learning for Image Restoration, ICCV2021 [PyTorch Code]](https://github.com/jianzhangcs/DAGL/raw/main/Figs/graph.PNG)
 84 Dec 9, 2022
84 Dec 9, 2022
 202 Dec 13, 2022
202 Dec 13, 2022

 31 Oct 28, 2021
31 Oct 28, 2021




 35 Dec 26, 2022
35 Dec 26, 2022
 6 Jun 27, 2022
6 Jun 27, 2022
 23 Dec 26, 2022
23 Dec 26, 2022
 55 Nov 23, 2022
55 Nov 23, 2022
 82 Dec 27, 2022
82 Dec 27, 2022
 103 Dec 14, 2022
103 Dec 14, 2022
 55 Nov 9, 2022
55 Nov 9, 2022
 12 Dec 12, 2022
12 Dec 12, 2022
 77 Dec 22, 2022
77 Dec 22, 2022