ApproxMVBB
Status
| Build | UnitTests |
|---|---|
 |
 |
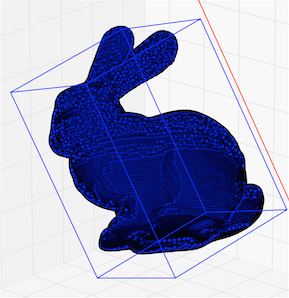
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
Computing the minimal volume oriented bounding box for a given point cloud in 3D is a hard problem in computer science. Exact algorithms are known and of cubic order in the number of points in 3D. A faster exact algorithm is currently not know. However, for lots of applications an approximation of the minimum volume oriented bounding box is acceptable and already accurate enough. This project was developed for research in Granular Rigidbody Dynamics. This small standard compliant C++11 library can either be built into a shared object library or directly be included in an existing C++ project.
I am not especially proud of the underlying code as it was written years ago, nevertheless consider PR for refactoring and clean ups are very welcome!
This library includes code for :
- computing an approximation of an oriented minimal volume box (multithreading support: OpenMP),
- computing the convex hull of a point cloud in 2d,
- computing the minimal area rectangle of a 2d point cloud,
- 2d projections of point clouds,
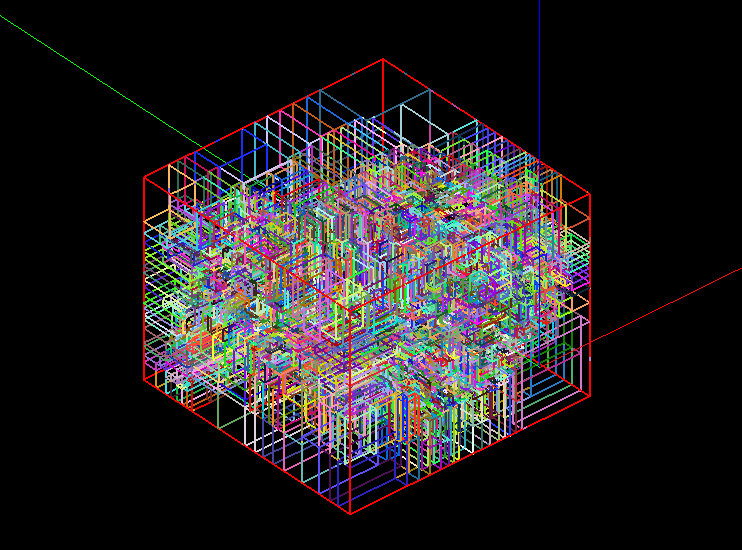
- fast building a kD-Tree (n-dimensional, templated) with sophisticated splitting techniques which optimizes a quality criteria during the splitting process,
- computing the k-nearest neighbors to a given point (kNN search) via kd-Tree.
- fast statistical outlier filtering of point clouds via (nearest neighbor search, kD-Tree).

Installation & Dependencies
To build the library, the tests and the example you need the build tool cmake. This library has these light-weight required dependencies:
- Eigen at least version 3.
- With homebrew or linuxbrew:
brew install eigen3
- With homebrew or linuxbrew:
- meta
- Install optional: Gets downloaded and used during build.
and theses optional dependecies:
- pugixml
- With homebrew or linuxbrew:
brew install pugixml - install with
#define PUGIXML_HAS_LONG_LONGenabled inpugiconfig.hpp. - only needed if cmake variable
ApproxMVBB_XML_SUPPORT=ON(default=OFF).
- With homebrew or linuxbrew:
- python3 only needed for visualization purposes.
Download these and install it on your system.
Download the latest ApproxMVBB code:
git clone https://github.com/gabyx/ApproxMVBB.git ApproxMVBB
Make a build directory and navigate to it:
mkdir Build
cd Build
Invoke cmake in the Build directory:
cmake ../ApproxMVBB
The cmake script tries to find Eigen,meta and pugixml If you installed these in a system wide folder (e.g /usr/local/) this should succeed without any problems. In the CMakeCache.txt file (or over the console by -D<variable>=ON) you can specify what you want to build, the following options are availabe:
ApproxMVBB_BUILD_LIBRARY,ApproxMVBB_BUILD_TESTSApproxMVBB_BUILD_EXAMPLEApproxMVBB_BUILD_BENCHMARKS- etc. See the marked red options after configuring in cmake-gui.
To install the library and the header files at a specific location /usr/local/ run cmake with:
cmake -DCMAKE_INSTALL_PREFIX="/usr/local/" ../ApproxMVBB
Finally, build and install the project:
make all
make install
By default the multithreading support is enabled if OpenMP is found! (see Multithreading Support) To build in parallel use the -jN flag in the make command, where Ndenotes the number of parallel threads to use, or use the Ninja Generator which already uses maximum threads your system offers.
CMake FindScripts The installation installs also scripts approxmvbb-config.cmake and approxmvbb-config-version.cmake into the lib/cmake folder. To include the library in another project the only thing you need to add in your cmake script is
find_package(ApproxMVBB [version] [COMPONENTS [SUPPORT_KDTREE] [SUPPORT_XML] ] [Required] )
which defines the following targets if ApproxMVBB has been found successfully:
ApproxMVBB::Core # Main target to link with!
ApproxMVBB::KdTreeSupport # Optional target for KdTree support to link with (only available if installed with this supported!)
ApproxMVBB::XMLSupport # Optional target for XML support to link with (only available if installed with this supported!)
The components SUPPORT_KDTREE additionally loads the dependency meta for the KdTree.hpp header and SUPPORT_XML loads pugixml for the KdTreeXml.hpp header.
If you installed the library into non-system generic location you can set the cmake variable $ApproxMVBB_DIR before invoking the find_library command:
set(ApproxMVBB_DIR "path/to/installation/lib/cmake")
find_package(ApproxMVBB [version] [Required] )
See the example example/libraryUsage which should be configured as a separate build, and the example example/kdTreeFiltering for more information on how to set up the dependencies!
Supported Platforms
The code has been tested on Linux and OS X with compilers clang and gcc. It should work for Windows as well, but has not been tested properly. Under Visual Studio 15 it seems to build.
Example Usage: Approximation MVBB
Please see the example/approxMVBB/main.cpp in the source directory. Given a point cloud with n=10000 points sampled in the unit cube in 3D we compute an approximation of the minimum volume bounding volume by the following calls:
#include <iostream>
#include "ApproxMVBB/ComputeApproxMVBB.hpp"
int main(int argc, char** argv)
{
ApproxMVBB::Matrix3Dyn points(3,10000);
points.setRandom();
ApproxMVBB::OOBB oobb = ApproxMVBB::approximateMVBB(points,0.001,500,5,0,5);
oobb.expandToMinExtentRelative(0.1);
return 0;
}
The returned object oriented bounding box oobb contains the lower oobb.m_minPoint and upper point oobb.m_maxPoint expressed in the coordinate frame K of the bounding box. The bounding box also stores the rotation matrix from the world frame to the object frame K as a quaternion oobb.m_q_KI . The rotation matrix R_KI from frame I to frame K can be obtained by oobb.m_q_KI.matrix() (see Eigen::Quaternion). This rotation matrix R_KI corresponds to a coordinate transformation A_IK which transforms coordinates from frame K to coordinates in frame I. Thereforce, to get the lower point expressed in the coordinate frame I this yields:
ApproxMVBB::Vector3 p = oobb.m_q_KI * oobb.m_minPoint // A_IK * oobb.m_minPoint
Degenerate OOBB: The returned bounding box might have a degenerated extent in some axis directions depending on the input points (e.g. 3 points defines a plane which is the minimal oriented bounding box with zero volume). The function oobb.expandToMinExtentRelative(0.1); is a post processing function to enlarge the bounding box by a certain percentage of the largest extent (if existing, otherwise a default value is used).
Points Outside of the final OOBB: Because the algorithm works internally with a sample of the point cloud, the resulting OOBB might not contain all points of the original point cloud! To compensate for this an additional loop is required:
ApproxMVBB::Matrix33 A_KI = oobb.m_q_KI.matrix().transpose();
auto size = points.cols();
for( unsigned int i=0; i<size; ++i ) {
oobb.unite(A_KI*points.col(i));
}
Function Parameters & How It Works: The most important function:
ApproxMVBB::approximateMVBB(pts,
epsilon,
pointSamples,
gridSize,
mvbbDiamOptLoops,
mvbbGridSearchOptLoops)
computes an approximation of the minimal volume bounding box in the following steps:
- An approximation of the diameter (direction which realizes the diameter:
z) of the pointsptsis computed. The valueepsilonis the absolute tolerance for the approximation of the diameter and has the same units as the pointspts(in the example 0.001 meter) - The points are projected into the plane perpendicular to the direction
z - An approximation of the diameter of the projected points in 2D is computed (direction
x) - The initial approximate bounding box
Ais computed in the orthogonal frame[x,y,z] - A first optional optimization loop is performed (parameter
mvbbDiamOptLoopsspecifies how many loops) by computing the minimal volume bounding box over a directiontwhere the directiontis choosen sequentially from the current optimal bounding box solution. The algorithm starts with the directions of the boxA. This optimization works with all points inptsand might use a lot of time - The initial bounding box
Ais used as a tight fit around the pointsptsto compute a representative sampleRSof the point cloud. The valuepointSamplesdefines how many points are used for the exhaustive grid search procedure in the next step - An exhaustive grid search (value
gridSizespecifies the x,y,z dimension of the grid defined by the bounding boxA) is performed. This search is a simple loop over all grid directions (see Gill Barequet, and Sariel Har-Peled [1]) to find a even smaller bounding box. For each grid directiongthe minimal bounding box of the projected points in directiongis computed. This consists of finding the minimal rectangle (axisuandvin world frame) of the projected point cloud in the plane perpendicular to directiong. The minimal bounding boxGin directiongcan be computed from the basis(u,v,g)and is a candidate for the overall minimization problem. Each found bounding box candidateGand its directions(u,v,g)can be used as a starting point for a second optional optimization loop (parametermvbbGridSearchOptLoops, same algorithm as in step 5 but with less points, namelyRS). - The final approximation for the minimal volume bounding box (minimal volume over all computed candidates) is returned.
💩
Example Usage: Generating a KdTree and Outlier Filtering
The library includes a fast KdTree implementation (which is not claimed to be ultimativly fast and absolutely memory efficient, but was written to fulfill this aspects to a certain level, real benchmarks still need to be done, the implementation can really well compete with famous implementations such as PCL(FLANN),ANN, and CGAL ) The KdTree splitting heuristic implements an extendable sophisticated splitting optimization which in the most elaborate, performance worst case consists of searching for the best split between the splitting heuristics MIDPOINT , MEDIAN and GEOMETRIC_MEAN by evaluating a user-provided quality evaluator. The simple standard quality evaluator is the LinearQualityEvaluator which computes the split quality by a weighted linear combination of the quantities splitRatio , pointRatio, minMaxExtentRatio.
Outlier filtering is done with the k-nearest neighbor search algorithm (similar to the PCL library but faster, and with user defined precision) and works roughly as the following: The algorithm finds for each point p in the point cloud k nearest neighbors and averages their distance (distance functor) to the point p to obtain a mean distance distance for this particular point. All nearest mean distances for all points give a histogram with a sample mean mean and sample standard deviation stdDev. All points which have a mean nearest neighbor distance greater or equal to mean + stdDevMult * stdDev are classified as outlier points.
Look at the examples in examples/kdTreeFiltering which produced the following pictures with the provided visualization notebook examples/kdTreeFiltering/python/VisualizeKdTree.ipynb.

Function Parameters & How It Works To come
Building and Visualizing the Tests
Building and installing the basic tests is done by:
cd ApproxMVBB
git submodule init
git submodule update
cd ../Build
make build_and_test
**Note that if the tests fail, submit a new issue and report which test failed. The results can still be visualized and should be correct. **
Note: To run the test in high-performance mode (needs lots of ram), which tests also points clouds of 140 million points and some polygonal statue lucy.txt successfully you need to set the cmake variable ApproxMVBB_TESTS_HIGH_PERFORMANCE to ON and additionally initialize the submodule additional and unzip the files:
cd ApproxMVBB
git submodule init
git submodule update
cd additional/tests/files; cat Lucy* | tar xz
and rebuild the tests. (this will copy the additional files next to the executable)
Executing the test application cd tests; ./ApproxMVBBTests will then run the following tests:
- Testing the ConvexHull2D for several point clouds in 2D
- Minimal area rectangle tests for several point clouds in 2D
- Testing the diameter computation and calculation of the initial bounding box
A(see [section](Function Parameters & How It Works)) for point clouds in 3D - Testing the full optimization pipeline to generate an approximation of the minimal volume bounding box
The output can be visualized with the ipython notebook /tests/python/PlotTestResults.ipynb:
cd Build/tests
ipython noteboook

Benchmark
Here are some short benchmarks (single core) from the tests folder:
| Point Cloud | # Points | ~ CPU Time approximateMVBB |
|---|---|---|
| Standford Bunny | 35'945 | 0.91 s |
| Standford Lucy | 14'027'872 | 1.19 s |
| Unit Cube | 140'000'000 | 7.0 s |
approximateMVBB runs approximateMVBBDiam and performs a grid search afterwards (here 5x5x5=25 directions with 5 optimization runs for each) It seems to take a long time for 140 million points. The most inefficient task is to get a good initial bounding box. This takes the most time as diameter computations are performed in 3d and then all points are projected in the found diameter direction in 3d and another diameter in the projected plane in 2d is computed. Afterwards the point cloud is sampled (not just random points, its done with a grid) and convex hull, minimal rectangle computations are performed over the grid directions. These algorithms could be made faster by exploiting the following things:
- Use an axis aligned bounding box as the initial bounding box for the grid search (not implemented yet)
- Parallelism for the projection -> (CUDA, threads)
Multithreading Support
You can build the library with OpenMP (by default enabled) You can set the cmake cache variables ApproxMVBB_OPENMP_USE_OPENMP=On which will further enable ApproxMVBB_OPENMP_USE_NTHREADS=On/Off. The variable ApproxMVBB_OPENMP_USE_NTHREADS toogles the number of threads to use. If Off, the number of threads is determined at runtime (default).
If you use clang, make sure you have the OpenMP enabled clang! GCC already supports OpenMP.
References
The main articles this code is based on:
@Article{malandain2002,
Author = {Gr'egoire Malandain and Jean-Daniel Boissonnat},
Journal = {International Journal of Computational Geometry & Applications},
Month = {December},
Number = {6},
Pages = {489 - 510},
Timestamp = {2015.09.02},
Title = {Computing the Diameter of a Point Set},
Volume = {12},
Year = {2002}}
and
@inproceedings{barequet2001,
Author = {Gill Barequet and Sariel Har-peled},
Booktitle = {In Proc. 10th ACM-SIAM Sympos. Discrete Algorithms},
Pages = {38--91},
Timestamp = {2015.09.02},
Title = {Efficiently Approximating the Minimum-Volume Bounding Box of a Point Set in Three Dimensions},
Year = {2001}}
Optimizations for future work:
@Article{chang2011,
Acmid = {2019641},
Address = {New York, NY, USA},
Articleno = {122},
Author = {Chang, Chia-Tche and Gorissen, Bastien and Melchior, Samuel},
Doi = {10.1145/2019627.2019641},
Issn = {0730-0301},
Issue_Date = {October 2011},
Journal = {ACM Trans. Graph.},
Keywords = {Computational geometry, bounding box, manifolds, optimization},
Month = oct,
Number = {5},
Numpages = {16},
Pages = {122:1--122:16},
Publisher = {ACM},
Timestamp = {2015.09.03},
Title = {Fast Oriented Bounding Box Optimization on the Rotation Group {$SO(3,\mathbb{R})$}},
Url = {http://doi.acm.org/10.1145/2019627.2019641},
Volume = {30},
Year = {2011},
Bdsk-Url-1 = {http://doi.acm.org/10.1145/2019627.2019641},
Bdsk-Url-2 = {http://dx.doi.org/10.1145/2019627.2019641}}
Licensing
This source code is released under MPL 2.0.
Author and Acknowledgements
ApproxMVBB was written by Gabriel Nützi, with source code from Grégoire Malandain & Jean-Daniel Boissonnat for the approximation of the diameter of a point cloud. I was inspired by the work and algorithms of Gill Barequet & Sariel Har-Peled for computing a minimal volume bounding box. Additionally, the geometric predicates (orient2d) used in the convex hull algorithm (graham scan) have been taken from the fine work of Jonathan Richard Shewchuk. Special thanks go to my significant other which always had an ear during breakfast for this little project



















 75 Nov 24, 2022
75 Nov 24, 2022
 1 Dec 30, 2021
1 Dec 30, 2021
 1 Jan 12, 2022
1 Jan 12, 2022
 4 Nov 27, 2022
4 Nov 27, 2022
 147 Dec 5, 2022
147 Dec 5, 2022
 305 Dec 16, 2022
305 Dec 16, 2022
 2 Apr 14, 2022
2 Apr 14, 2022
 0 Sep 28, 2022
0 Sep 28, 2022
 460 Jan 5, 2023
460 Jan 5, 2023
 119 Jan 2, 2023
119 Jan 2, 2023
 63 Dec 9, 2022
63 Dec 9, 2022
 78 Dec 27, 2022
78 Dec 27, 2022
 65 Dec 26, 2022
65 Dec 26, 2022
 8 Sep 27, 2021
8 Sep 27, 2021
 149 Jan 4, 2023
149 Jan 4, 2023
 16 Oct 6, 2022
16 Oct 6, 2022
 114 Dec 29, 2022
114 Dec 29, 2022
 7 May 26, 2022
7 May 26, 2022