Learning to Stylize Novel Views
Contact: Hsin-Ping Huang ([email protected])
Introduction
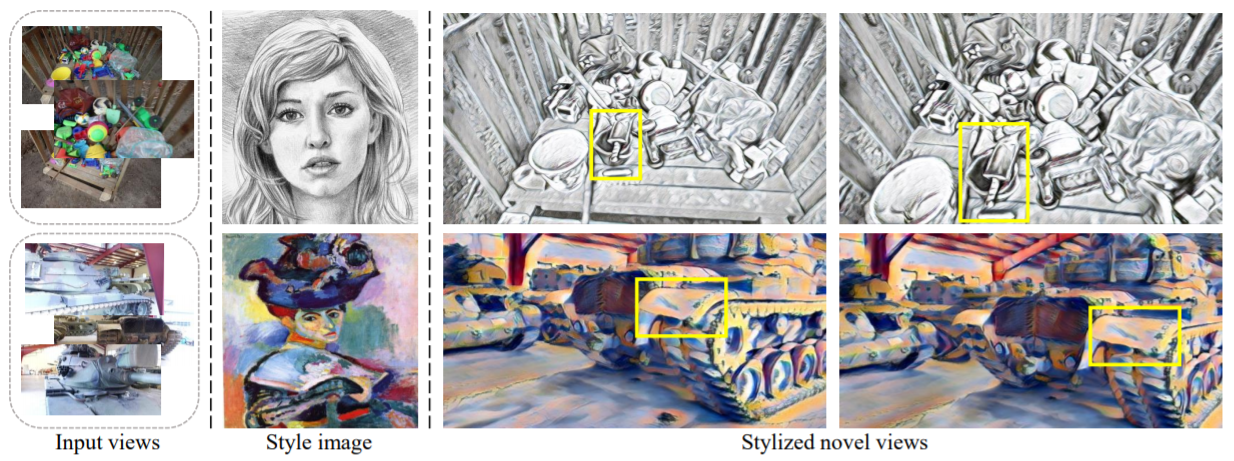
We tackle a 3D scene stylization problem - generating stylized images of a scene from arbitrary novel views given a set of images of the same scene and a reference image of the desired style as inputs. Direct solution of combining novel view synthesis and stylization approaches lead to results that are blurry or not consistent across different views. We propose a point cloud-based method for consistent 3D scene stylization. First, we construct the point cloud by back-projecting the image features to the 3D space. Second, we develop point cloud aggregation modules to gather the style information of the 3D scene, and then modulate the features in the point cloud with a linear transformation matrix. Finally, we project the transformed features to 2D space to obtain the novel views. Experimental results on two diverse datasets of real-world scenes validate that our method generates consistent stylized novel view synthesis results against other alternative approaches.
Paper
Learning to Stylize Novel Views
Hsin-Ping Huang, Hung-Yu Tseng, Saurabh Saini, Maneesh Singh, and Ming-Hsuan Yang
IEEE International Conference on Computer Vision (ICCV), 2021
Please cite our paper if you find it useful for your research.
@inproceedings{huang_2021_3d_scene_stylization,
title = {Learning to Stylize Novel Views},
author={Huang, Hsin-Ping and Tseng, Hung-Yu and Saini, Saurabh and Singh, Maneesh and Yang, Ming-Hsuan},
booktitle = {ICCV},
year={2021}
}
Installation and Usage
Kaggle account
- To download the WikiArt dataset, you would need to register for a Kaggle account.
- Sign up for a Kaggle account at https://www.kaggle.com.
- Go to top right and select the 'Account' tab of your user profile (https://www.kaggle.com/username/account)
- Select 'Create API Token'. This will trigger the download of kaggle.json.
- Place this file in the location ~/.kaggle/kaggle.json
- chmod 600 ~/.kaggle/kaggle.json
Install
- Clone this repo
git clone https://github.com/hhsinping/stylescene.git
cd stylescene
- Create conda environment and install required packages
- Python 3.9
- Pytorch 1.7.1, Torchvision 0.8.2, Pytorch-lightning 0.7.1
- matplotlib, scikit-image, opencv-python, kaggle
- Pointnet2_Pytorch
- Pytorch3D 0.4.0
conda create -n stylescene python=3.9.1
conda activate stylescene
pip install torch==1.7.1+cu110 torchvision==0.8.2+cu110 -f https://download.pytorch.org/whl/torch_stable.html
pip install matplotlib==3.4.1 scikit-image==0.18.1 opencv-python==4.5.1.48 pytorch-lightning==0.7.1 kaggle
pip install "git+git://github.com/erikwijmans/Pointnet2_PyTorch.git#egg=pointnet2_ops&subdirectory=pointnet2_ops_lib"
curl -LO https://github.com/NVIDIA/cub/archive/1.10.0.tar.gz
tar xzf 1.10.0.tar.gz
export CUB_HOME=$PWD/cub-1.10.0
git clone https://github.com/facebookresearch/pytorch3d.git
cd pytorch3d
git checkout 340662e
pip install -e .
cd -
Our code has been tested on Ubuntu 20.04, CUDA 11.1 with a RTX 2080 Ti GPU.
Datasets
- Download datasets, pretrained model, complie C++ code using the following script. This script will:
- Download Tanks and Temples dataset
- Download continous testing sequences of Truck, M60, Train, Playground scenes
- Download 120 testing styles
- Download WikiArt dataset from Kaggle
- Download pretrained models
- Complie the c++ code in preprocess/ext/preprocess/ and stylescene/ext/preprocess/
bash download_data.sh
- Preprocess Tanks and Temples dataset
This script will generate points.npy and r31.npy for each training and testing scene.
points.npy records the 3D coordinates of the re-projected point cloud and its correspoinding 2D positions in source images
r31.npy contains the extracted VGG features of sources images
cd preprocess
python Get_feat.py
cd ..
Testing example
cd stylescene/exp
vim ../config.py
Set Train = False
Set Test_style = [0-119 (refer to the index of style images in ../../style_data/style120/)]
To evaluate the network you can run
python exp.py --net fixed_vgg16unet3_unet4.64.3 --cmd eval --iter [n_iter/last] --eval-dsets tat-subseq --eval-scale 0.25
Generated images can be found at experiments/tat_nbs5_s0.25_p192_fixed_vgg16unet3_unet4.64.3/tat_subseq_[sequence_name]_0.25_n4/
Training example
cd stylescene/exp
vim ../config.py
Set Train = True
To train the network from scratch you can run
python exp.py --net fixed_vgg16unet3_unet4.64.3 --cmd retrain
To train the network from a checkpoint you can run
python exp.py --net fixed_vgg16unet3_unet4.64.3 --cmd resume
Generated images can be found at ./log
Saved model and training log can be found at experiments/tat_nbs5_s0.25_p192_fixed_vgg16unet3_unet4.64.3/
Acknowledgement
The implementation is partly based on the following projects: Free View Synthesis, Linear Style Transfer, PointNet++, SynSin.

 296 Dec 29, 2022
296 Dec 29, 2022

 489 Jan 7, 2023
489 Jan 7, 2023

 562 Dec 27, 2022
562 Dec 27, 2022
 170 Dec 1, 2022
170 Dec 1, 2022

 134 Dec 16, 2022
134 Dec 16, 2022

 62 Dec 24, 2022
62 Dec 24, 2022
![[CVPR 2021] Rethinking Text Segmentation: A Novel Dataset and A Text-Specific Refinement Approach](https://github.com/SHI-Labs/Rethinking-Text-Segmentation/raw/main/.figure/image_only.jpg)
 174 Dec 19, 2022
174 Dec 19, 2022

 110 Dec 29, 2022
110 Dec 29, 2022

 34 Oct 2, 2022
34 Oct 2, 2022


 44 Nov 20, 2022
44 Nov 20, 2022
 3 Nov 19, 2022
3 Nov 19, 2022
 249 Dec 28, 2022
249 Dec 28, 2022
 89 Jan 5, 2023
89 Jan 5, 2023
 20 Nov 24, 2022
20 Nov 24, 2022
 56 Dec 9, 2022
56 Dec 9, 2022
 94 Nov 21, 2022
94 Nov 21, 2022
 2 Jan 27, 2022
2 Jan 27, 2022
 2 Dec 14, 2022
2 Dec 14, 2022
 163 Dec 14, 2022
163 Dec 14, 2022