FCA: Learning a 3D Full-coverage Vehicle Camouflage for Multi-view Physical Adversarial Attack
Case study of the FCA. The code can be find in FCA.
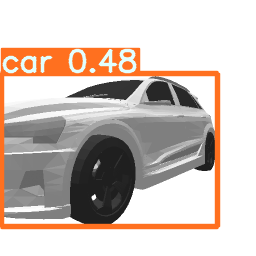
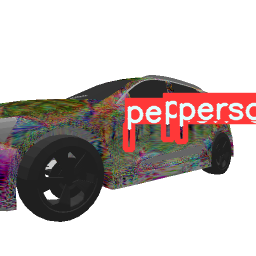
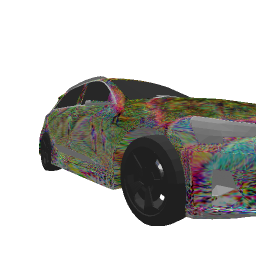
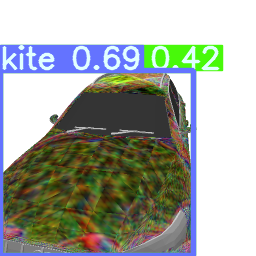
Cases of Digital Attack
Carmear distance is 3
before
after
Carmear distance is 5
before
after
Carmear distance is 10
before
after
Cases of Multi-view Attack
before
after
The first row is the original detection result. The second row is the camouflaged detection result.
before
after
The first row is the original detection result. The second row is the camouflaged detection result.
Ablation study
Different combination of loss terms
As we can see from the Figure, different loss terms plays different roles in attacking. For example, the camouflaged car generated by obj+smooth (we omit the smooth loss, and denotes as obj) can hidden the vehicle successfully, while the camouflaged car generated by iou can successfully suppress the detecting bounding box of the car region, and finally the camouflaged car generated by cls successfully make the detector to misclassify the car to anther category.
Hello,
I found that the default dataset used in your code is "phy_attack" which is the same one used in DAS.
But I don't know how to set other directories such as "train_new", "train_label_new", etc.
Could you give me more detailed guidelines for using the dataset?
I'd really appreciate it if you reply to my question.
Thank you.
Are there some tricks that can effectively improve the attack performance? My attack performance is not high after training, only about 70%, and it is worse for small objects. Thank you~
Hello, thanks for the great work.
I am wondering how we can extract the generated attack texture to use it on other 3D software or print it for the real world?
Is it possible for us to save the texture as an image file?
Because we found that the output texture is saved as a NumPy file, which can only be used for this neural renderer code.








































 12 Nov 23, 2022
12 Nov 23, 2022
 8 Oct 26, 2022
8 Oct 26, 2022

 21 Nov 23, 2022
21 Nov 23, 2022

 47 Nov 6, 2022
47 Nov 6, 2022
 120 Nov 21, 2022
120 Nov 21, 2022

 6 Nov 14, 2022
6 Nov 14, 2022

 25 Oct 10, 2022
25 Oct 10, 2022
 118 Jan 4, 2023
118 Jan 4, 2023

 66 Jan 4, 2023
66 Jan 4, 2023




 138 Dec 28, 2022
138 Dec 28, 2022
 132 Dec 15, 2022
132 Dec 15, 2022
 51 Dec 1, 2022
51 Dec 1, 2022
 11 Feb 8, 2022
11 Feb 8, 2022
 26 Dec 28, 2022
26 Dec 28, 2022
 88 Dec 12, 2022
88 Dec 12, 2022
 78 Dec 10, 2022
78 Dec 10, 2022
 30 Nov 18, 2022
30 Nov 18, 2022
 30 Jan 1, 2023
30 Jan 1, 2023
 10 Nov 7, 2022
10 Nov 7, 2022