Stitching Historical Aerial Photos
![]()
The Story
In a centuries-old library at the University of Oxford, millions of aerial photographs taken in the final decades of the British Empire may help us prepare for a potential 21st-century calamity: an exodus of people driven by climate change to places that are more livable — but politically inhospitable.
Our team is studying how climate change might set off mass migrations around the world, and looking back to history for inspiration. These century-old photos, some of which taken by the British Royal Air Force, are key to this analysis because they could reveal how populations responded to natural disasters in the past — specifically, a series of extreme droughts that plagued Africa, and hurricanes that wreaked havoc in the Caribbean islands. There were such little census or survey data back then, and the earliest record of satellite images started only in the 1970s. Apart from these boxes and boxes of black-and-white photos, scholars trying to study historical mass migrations have almost nothing to work with; but now, with modern computer vision and machine learning techniques, we can paint a complete picture of human settlement patterns and how they respond to extreme weather events.
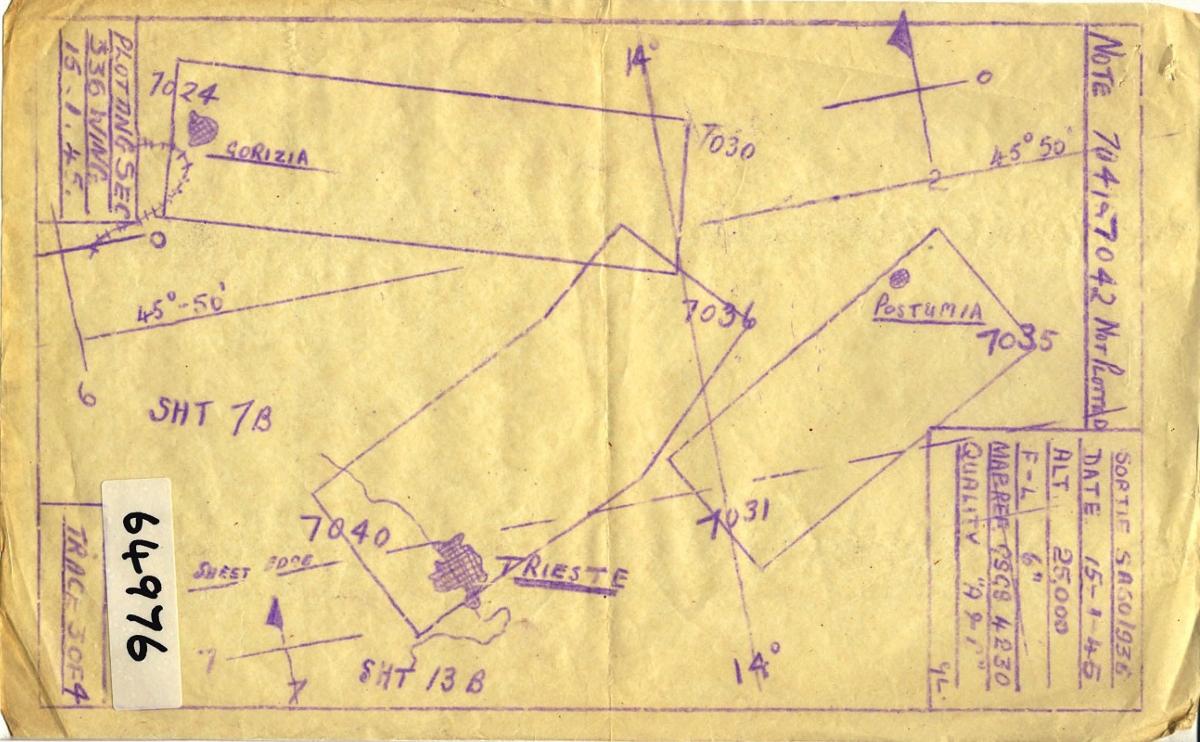
One of the first challenges in working with historical aerial photos is that it is difficult to georeference them (assigning the images to the geographical location that they cover). Unlike modern satellite imagery, historical images are not georeferenced at the time when they are collected, and the ways that experts record their locations can be pretty crude. Usually, they roughly outline the areas that the aerial photos cover by hand, and mark the image identifier numbers on them. As you can imagine, these hand-drawn maps tend to be inaccurate, and more importantly, georeferencing aerial photos solely based on hand-drawn maps is labor-intensive and quickly becomes impossible as the number of aerial photos grows. Other commercially available software such as Photoshop and OpenCV succeeded in automatically stitching a small number of images (<100), but failed miserably when scaled up.
Figure: An example sortie plot. Source: NCAP.

In this project, I led a research team to develop an efficient and scalable data pipeline to digitize, process, stitch and georeference historical aerial photos; extract building footprints and road networks with deep learning models; and trace the changes in human settlement patterns over time. This repo contains codes for the image stitching process.
The Idea
We break this problem down to two steps -
- Given a pair of two images that overlap with each other, how do we overlay them? We take advantage of established methods in the computer vision literature - using SURF to detect features and RANSAC to estimate transformations from matched feature points robustly. These techniques were originally developed for panorama image stitching and work well in our context. This part of the codes is implemented mostly with
opencv.

- If we see all the images of interest as a graph (with each node being an image, and each edge being a relative transformation between a pair of images), how do we go from a collection of pairwise relationships to the absolute positions of all the images? We develop a "joint optimization" routine, which creates a differentiable loss given all the pairwise matches that are available, and uses back propagation to compute gradients and optimizes with Adam. This part of the codes is implemented mostly with
pytorch. (No GPUs required for running the codes.)

Source of the demo image: Historical England.
Play with our demo.ipynb!
In this repo, we release a simplified version of our core codebase. For legal reasons, we cannot share raw historical photos or sortie plots publicly; so we provide a "toy example" for demonstration. In practice, our codebase can handle complex scenes with tens of thousands of images. Play with our interactive demo in demo.ipynb! You can change the initialization positions for all the images, but they will always find their way back to each other.
To play with our demo, run
docker pull luna983/stitch-aerial-photos:latest
docker run -p 8888:8888 luna983/stitch-aerial-photos:latest
go to http://localhost:8888/?token=[REPLACE WITH TOKEN SHOWN] in a web browser, and open up demo.ipynb to start exploring!

Note that the SURF functions are not included in the free OpenCV distributions (so pip install opencv-python would not be sufficient); the docker image contains a version of OpenCV compiled specifically for that environment.

 73 Dec 15, 2022
73 Dec 15, 2022

 42 Jul 25, 2022
42 Jul 25, 2022
 2 Apr 13, 2022
2 Apr 13, 2022

 10 Jan 2, 2023
10 Jan 2, 2023

 230 Dec 19, 2022
230 Dec 19, 2022
 607 Dec 31, 2022
607 Dec 31, 2022

 294 Dec 12, 2022
294 Dec 12, 2022
 212 Dec 25, 2022
212 Dec 25, 2022
 45 Nov 29, 2022
45 Nov 29, 2022

 9 Nov 10, 2022
9 Nov 10, 2022
 79 Jan 6, 2023
79 Jan 6, 2023
 184 Dec 11, 2022
184 Dec 11, 2022
 7 Jun 6, 2022
7 Jun 6, 2022
 3.7k Jan 3, 2023
3.7k Jan 3, 2023
 35 Nov 2, 2022
35 Nov 2, 2022
 47 Dec 20, 2022
47 Dec 20, 2022
 129 Jan 4, 2023
129 Jan 4, 2023
 145 Jan 1, 2023
145 Jan 1, 2023
 33 Jan 4, 2023
33 Jan 4, 2023
{kind=link}
{kind=link}