CAT-Net: Learning Canonical Appearance Transformations
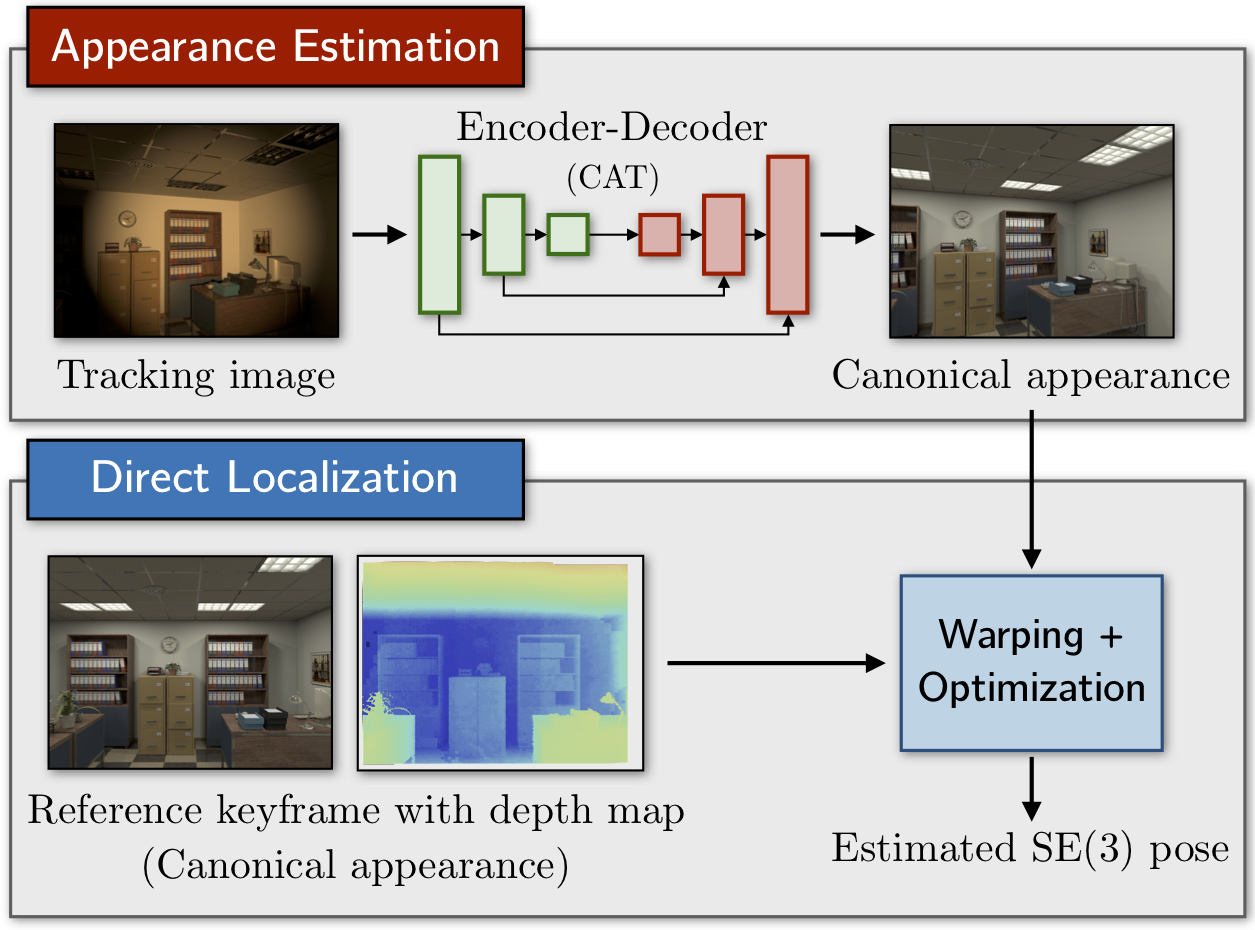
Code to accompany our paper "How to Train a CAT: Learning Canonical Appearance Transformations for Direct Visual Localization Under Illumination Change".
Dependencies
- numpy
- matpotlib
- pytorch + torchvision (1.2)
- Pillow
- progress (for progress bars in train/val/test loops)
- tensorboard + tensorboardX (for visualization)
- pyslam + liegroups (optional, for running odometry/localization experiments)
- OpenCV (optional, for running odometry/localization experiments)
Training the CAT
- Download the ETHL dataset from here or the Virtual KITTI dataset from here
- ETHL only: rename
ethl1/2toethl1/2_static. - ETHL only: Update the local paths in
tools/make_ethl_real_sync.pyand runpython3 tools/make_ethl_real_sync.pyto generate a synchronized copy of therealsequences.
- ETHL only: rename
- Update the local paths in
run_cat_ethl/vkitti.pyand runpython3 run_cat_ethl/vkitti.pyto start training. - In another terminal run
tensorboard --port [port] --logdir [path]to start the visualization server, where[port]should be replaced by a numeric value (e.g., 60006) and[path]should be replaced by your local results directory. - Tune in to
localhost:[port]and watch the action.
Running the localization experiments
- Ensure the pyslam and liegroups packages are installed.
- Update the local paths in
make_localization_data.pyand runpython3 make_localization_data.py [dataset]to compile the model outputs into alocalization_datadirectory. - Update the local paths in
run_localization_[dataset].pyand runpython3 run_localization_[dataset].py [rgb,cat]to compute VO and localization results using either the original RGB or CAT-transformed images. - You can compute localization errors against ground truth using the
compute_localization_errors.pyscript, which generates CSV files and several plots. Update the local paths and runpython3 compute_localization_errors.py [dataset].
Citation
If you use this code in your research, please cite:
@article{2018_Clement_Learning,
author = {Lee Clement and Jonathan Kelly},
journal = {{IEEE} Robotics and Automation Letters},
link = {https://arxiv.org/abs/1709.03009},
title = {How to Train a {CAT}: Learning Canonical Appearance Transformations for Direct Visual Localization Under Illumination Change},
year = {2018}
}
 11.4k Feb 13, 2021
11.4k Feb 13, 2021
 40 Dec 23, 2022
40 Dec 23, 2022

 80 Dec 8, 2022
80 Dec 8, 2022
 909 Dec 30, 2022
909 Dec 30, 2022
 42 Dec 9, 2022
42 Dec 9, 2022
 152 Dec 28, 2022
152 Dec 28, 2022
 22 Jul 7, 2022
22 Jul 7, 2022

 1 Nov 19, 2021
1 Nov 19, 2021
 2 Oct 31, 2022
2 Oct 31, 2022


 24 Jul 7, 2022
24 Jul 7, 2022
 9 Mar 3, 2022
9 Mar 3, 2022
 260 Nov 28, 2022
260 Nov 28, 2022
 52 Nov 14, 2022
52 Nov 14, 2022
 300 Dec 24, 2022
300 Dec 24, 2022
 521 Dec 30, 2022
521 Dec 30, 2022
 1 Dec 8, 2021
1 Dec 8, 2021
 34 Dec 8, 2022
34 Dec 8, 2022
 172 Dec 22, 2022
172 Dec 22, 2022
 21.3k Jan 1, 2023
21.3k Jan 1, 2023