102 Repositories
Python robotics Libraries

Code for Ditto: Building Digital Twins of Articulated Objects from Interaction
Ditto: Building Digital Twins of Articulated Objects from Interaction Zhenyu Jiang, Cheng-Chun Hsu, Yuke Zhu CVPR 2022, Oral Project | arxiv News 2022
 78 Dec 22, 2022
78 Dec 22, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023

SafePicking: Learning Safe Object Extraction via Object-Level Mapping, ICRA 2022
SafePicking Learning Safe Object Extraction via Object-Level Mapping Kentaro Wad
 49 Oct 24, 2022
49 Oct 24, 2022

UMPNet: Universal Manipulation Policy Network for Articulated Objects
UMPNet: Universal Manipulation Policy Network for Articulated Objects Zhenjia Xu, Zhanpeng He, Shuran Song Columbia University Robotics and Automation
 33 Dec 3, 2022
33 Dec 3, 2022
Axel - 3D printed robotic hands and they controll with Raspberry Pi and Arduino combo
Axel It's our graduation project about 3D printed robotic hands and they control
 0 Feb 14, 2022
0 Feb 14, 2022
A large-scale benchmark for co-optimizing the design and control of soft robots, as seen in NeurIPS 2021.
Evolution Gym A large-scale benchmark for co-optimizing the design and control of soft robots. As seen in Evolution Gym: A Large-Scale Benchmark for E
 121 Dec 14, 2022
121 Dec 14, 2022

This repository contains a toolkit for collecting, labeling and tracking object keypoints
This repository contains a toolkit for collecting, labeling and tracking object keypoints. Object keypoints are semantic points in an object's coordinate frame.
 13 Dec 12, 2022
13 Dec 12, 2022
DROPO: Sim-to-Real Transfer with Offline Domain Randomization
DROPO: Sim-to-Real Transfer with Offline Domain Randomization Gabriele Tiboni, Karol Arndt, Ville Kyrki. This repository contains the code for the pap
 8 Dec 19, 2022
8 Dec 19, 2022

Instantaneous Motion Generation for Robots and Machines.
Ruckig Instantaneous Motion Generation for Robots and Machines. Ruckig generates trajectories on-the-fly, allowing robots and machines to react instan
 374 Dec 23, 2022
374 Dec 23, 2022
UMich 500-Level Mobile Robotics Course
MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, lecture notes, and example codes, see
 393 Dec 29, 2022
393 Dec 29, 2022
A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
Monte Carlo Simulation to the Paper A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
 0 Dec 6, 2021
0 Dec 6, 2021
This repository contains the exercices for the robotics class at Supaero, 2022.
Supaero robotics, 2022 This repository contains the exercices for the robotics class at Supaero, 2022. The exercices are organized by notebook. Each n
 5 Aug 1, 2022
5 Aug 1, 2022
Course on computational design, non-linear optimization, and dynamics of soft systems at UIUC.
Computational Design and Dynamics of Soft Systems · This is a repository that contains the source code for generating the lecture notes, handouts, exe
 4 Jul 21, 2022
4 Jul 21, 2022

K Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching (To appear in RA-L 2022)
KCP The official implementation of KCP: k Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching, accepted for p
 109 Dec 14, 2022
109 Dec 14, 2022

Scenarios, tutorials and demos for Autonomous Driving
The Autonomous Driving Cookbook (Preview) NOTE: This project is developed and being maintained by Project Road Runner at Microsoft Garage. This is cur
 2.1k Jan 2, 2023
2.1k Jan 2, 2023
Python library to interact with Move Hub / PoweredUp Hubs
Python library to interact with Move Hub / PoweredUp Hubs Move Hub is central controller block of LEGO® Boost Robotics Set. In fact, Move Hub is just
 499 Jan 4, 2023
499 Jan 4, 2023
Robotics environments
Robotics environments Details and documentation on these robotics environments are available in OpenAI's blog post and the accompanying technical repo
 121 Dec 28, 2022
121 Dec 28, 2022
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning Website • About • Installation • Using OpenDR
 304 Dec 28, 2022
304 Dec 28, 2022

An Inverse Kinematics library aiming performance and modularity
IKPy Demo Live demos of what IKPy can do (click on the image below to see the video): Also, a presentation of IKPy: Presentation. Features With IKPy,
 481 Jan 2, 2023
481 Jan 2, 2023
The Generic Manipulation Driver Package - Implements a ROS Interface over the robotics toolbox for Python
Armer Driver Armer aims to provide an interface layer between the hardware drivers of a robotic arm giving the user control in several ways: Joint vel
 13 Nov 26, 2022
13 Nov 26, 2022

NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser.
NiceGUI NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser. You can create buttons, dialogs, markdown, 3D scences
 419 Jan 9, 2023
419 Jan 9, 2023

Pypot ⚙️ A Python library for Dynamixel motor control
Pypot ⚙️ A Python library for Dynamixel motor control Pypot is a cross-platform Python library making it easy and fast to control custom robots based
 238 Nov 21, 2022
238 Nov 21, 2022
🔀 Visual Room Rearrangement
AI2-THOR Rearrangement Challenge Welcome to the 2021 AI2-THOR Rearrangement Challenge hosted at the CVPR'21 Embodied-AI Workshop. The goal of this cha
 55 Dec 22, 2022
55 Dec 22, 2022

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022

This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
 17 Nov 3, 2022
17 Nov 3, 2022
Robot Hacking Manual (RHM). From robotics to cybersecurity. Papers, notes and writeups from a journey into robot cybersecurity.
RHM: Robot Hacking Manual Download in PDF RHM v0.4 ┃ Read online The Robot Hacking Manual (RHM) is an introductory series about cybersecurity for robo
 233 Dec 30, 2022
233 Dec 30, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
Jiminy, fast and portable Python/C++ simulator of poly-articulated systems with OpenAI Gym interface for reinforcement learning.
Jiminy is a fast and portable cross-platform open-source simulator for poly-articulated systems. It was built with two ideas in mind: provide a fast y
 122 Dec 29, 2022
122 Dec 29, 2022
A simple small scale electric car was build which can be driven by remote control and features a fully autonomous parking procedure.
personal-autonomous-parking-car-raspberry A simple electric car model was build using Raspbery pi. The car has remote control and autonomous operation
 2 Jan 26, 2022
2 Jan 26, 2022

Samples for robotics, node, python, and bash
RaspberryPi Robot Project Technologies: Render: intent Currently designed to act as programmable sentry.
 1 May 31, 2022
1 May 31, 2022

CALVIN - A benchmark for Language-Conditioned Policy Learning for Long-Horizon Robot Manipulation Tasks
CALVIN CALVIN - A benchmark for Language-Conditioned Policy Learning for Long-Horizon Robot Manipulation Tasks Oier Mees, Lukas Hermann, Erick Rosete,
 107 Dec 26, 2022
107 Dec 26, 2022
Add built-in support for quaternions to numpy
Quaternions in numpy This Python module adds a quaternion dtype to NumPy. The code was originally based on code by Martin Ling (which he wrote with he
 531 Dec 28, 2022
531 Dec 28, 2022
A Fast, Easy, and User Friendly way to control Robotics Actuators.
T-Motor Controller A Fast, Easy, and User Friendly way to control Robotics Actuators. View Demo · Report Bug · Request Feature Table of Contents About
 26 Aug 23, 2022
26 Aug 23, 2022

Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation
🤖 RoboCop 🤖 Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation Made by Clemente Donoso, 📍 Chile 🇨🇱 RoboCop Lateral Fron
 2 Jan 4, 2022
2 Jan 4, 2022
2021 National Underwater Robotics Vision Optics
2021-National-Underwater-Robotics-Vision-Optics 2021年全国水下机器人算法大赛-光学赛道-B榜精度第18名 (Kilian_Di的团队:A榜map@50:95 56.36 B榜map@50:95 56.7) 2021年全国水下机器人算法大赛-声学赛道
 9 Nov 4, 2022
9 Nov 4, 2022
Bonnet: An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics.
Bonnet: An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics. By Andres Milioto @ University of Bonn. (for the new P
 314 Dec 30, 2022
314 Dec 30, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022
Robot Servers and Server Manager software for robo-gym
robo-gym-server-modules Robot Servers and Server Manager software for robo-gym. For info on how to use this package please visit the robo-gym website
 4 Aug 16, 2021
4 Aug 16, 2021

Training code and evaluation benchmarks for the "Self-Supervised Policy Adaptation during Deployment" paper.
Self-Supervised Policy Adaptation during Deployment PyTorch implementation of PAD and evaluation benchmarks from Self-Supervised Policy Adaptation dur
 101 Nov 1, 2022
101 Nov 1, 2022

Final project for ENGG 5402 Advanced Robotics in CUHK
Final project Final project Update Foundations Ubuntu virtual machine Ubuntu How to use Github to keep tracking the change of code version? Docker Set
 8 Aug 1, 2022
8 Aug 1, 2022

A Python implementation of the Robotics Toolbox for MATLAB
Robotics Toolbox for Python A Python implementation of the Robotics Toolbox for MATLAB® GitHub repository Documentation Wiki (examples and details) Sy
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and motion planning
pybullet-planning (previously ss-pybullet) A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and
 260 Dec 27, 2022
260 Dec 27, 2022
Libraries, tools and tasks created and used at DeepMind Robotics.
dm_robotics: Libraries, tools, and tasks created and used for Robotics research at DeepMind. Package overview Package Summary Transformations Rigid bo
 273 Jan 6, 2023
273 Jan 6, 2023
An example project which contains the Unity components necessary to complete Navigation2's SLAM tutorial with a Turtlebot3, using a custom Unity environment in place of Gazebo.
Navigation 2 SLAM Example This example provides a Unity Project and a colcon workspace that, when used together, allows a user to substitute Unity as
 183 Jan 4, 2023
183 Jan 4, 2023

A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions
A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions Kapoutsis, A.C., Chatzichristofis,
 5 Oct 15, 2022
5 Oct 15, 2022
Code base for reproducing results of I.Schubert, D.Driess, O.Oguz, and M.Toussaint: Learning to Execute: Efficient Learning of Universal Plan-Conditioned Policies in Robotics. NeurIPS (2021)
Learning to Execute (L2E) Official code base for completely reproducing all results reported in I.Schubert, D.Driess, O.Oguz, and M.Toussaint: Learnin
 3 May 18, 2022
3 May 18, 2022
![[CoRL 2021] A robotics benchmark for cross-embodiment imitation.](https://github.com/kevinzakka/x-magical/raw/main/images/gripper-sweep.gif)
[CoRL 2021] A robotics benchmark for cross-embodiment imitation.
x-magical x-magical is a benchmark extension of MAGICAL specifically geared towards cross-embodiment imitation. The tasks still provide the Demo/Test
 36 Nov 26, 2022
36 Nov 26, 2022
Python package for agilex robotics mobile base platform
This is Python API for Agilex Robotics Mobile base This is a python API for Can communication with Agilex Robotics Mobile base and controlling it. Sup
 7 Sep 6, 2022
7 Sep 6, 2022

Gym environments used in the paper: "Developmental Reinforcement Learning of Control Policy of a Quadcopter UAV with Thrust Vectoring Rotors"
gym_multirotor Gym to train reinforcement learning agents on UAV platforms Quadrotor Tiltrotor Requirements This package has been tested on Ubuntu 18.
 19 Dec 29, 2022
19 Dec 29, 2022
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python THIS PROJECT IS CURRENTLY A WORK IN PROGRESS AND THUS THIS REPOSITORY I
 14 Dec 31, 2022
14 Dec 31, 2022
![[NeurIPS 2021] PyTorch Code for Accelerating Robotic Reinforcement Learning with Parameterized Action Primitives](https://github.com/mihdalal/raps/raw/master/readme_files/raps.png)
[NeurIPS 2021] PyTorch Code for Accelerating Robotic Reinforcement Learning with Parameterized Action Primitives
Robot Action Primitives (RAPS) This repository is the official implementation of Accelerating Robotic Reinforcement Learning via Parameterized Action
 55 Dec 27, 2022
55 Dec 27, 2022

Distilling Motion Planner Augmented Policies into Visual Control Policies for Robot Manipulation (CoRL 2021)
Distilling Motion Planner Augmented Policies into Visual Control Policies for Robot Manipulation [Project website] [Paper] This project is a PyTorch i
 6 Feb 28, 2022
6 Feb 28, 2022
Planning Algorithms in AI and Robotics. MSc course at Skoltech Data Science program
Planning Algorithms in AI and Robotics course T2 2021-22 The Planning Algorithms in AI and Robotics course at Skoltech, MS in Data Science, during T2,
 6 Sep 21, 2022
6 Sep 21, 2022
The ROS package for Airbotics.
airbotics The ROS package for Airbotics: Developed for ROS 1 and Python 3.8. The package has not been officially released on ROS yet so manual install
 19 Dec 25, 2022
19 Dec 25, 2022

Anomaly Detection Based on Hierarchical Clustering of Mobile Robot Data
We proposed a new approach to detect anomalies of mobile robot data. We investigate each data seperately with two clustering method hierarchical and k-means. There are two sub-method that we used for produce an anomaly score. Then, we merge these two score and produce merged anomaly score as a result.
 1 Jan 9, 2022
1 Jan 9, 2022

Programming of Robotics Systems course at the University of Aveiro, Portugal, 2021-2022.
Programação de Sistemas Robóticos Miguel Riem Oliveira Universidade de Aveiro 2021-2022 Projeto AtlasCar Projecto RACE IROS 2014 AtlasCar2 ATOM IROS 2
 22 Jul 13, 2022
22 Jul 13, 2022

A python file which I wrote to allow the Dorna Robots API to draw an Image on a 3D plane
Dorna-Robotics-Internship Code In the directory "Code" is a python file which I wrote to allow the Dorna Robots API to draw an Image on a 3D plane. I
 2 Dec 6, 2021
2 Dec 6, 2021

FlingBot: The Unreasonable Effectiveness of Dynamic Manipulations for Cloth Unfolding
This repository contains code for training and evaluating FlingBot in both simulation and real-world settings on a dual-UR5 robot arm setup for Ubuntu 18.04
70 Dec 6, 2022

Ackermann Line Follower Robot Simulation.
Ackermann Line Follower Robot This is a simulation of a line follower robot that works with steering control based on Stanley: The Robot That Won the
 2 Apr 16, 2022
2 Apr 16, 2022

Motion planning environment for Sampling-based Planners
Sampling-Based Motion Planners' Testing Environment Sampling-based motion planners' testing environment (sbp-env) is a full feature framework to quick
 23 Aug 23, 2022
23 Aug 23, 2022
Multi-Joint dynamics with Contact. A general purpose physics simulator.
MuJoCo Physics MuJoCo stands for Multi-Joint dynamics with Contact. It is a general purpose physics engine that aims to facilitate research and develo
5.2k Jan 2, 2023

The project is an open-source and low-cost kit to get started with underactuated robotics.
Torque Limited Simple Pendulum Introduction The project is an open-source and low-cost kit to get started with underactuated robotics. The kit targets
 34 Dec 14, 2022
34 Dec 14, 2022
Repo for EchoVPR: Echo State Networks for Visual Place Recognition
EchoVPR Repo for EchoVPR: Echo State Networks for Visual Place Recognition Currently under development Dirs: data: pre-collected hidden representation
 4 Oct 4, 2022
4 Oct 4, 2022

Vision-and-Language Navigation in Continuous Environments using Habitat
Vision-and-Language Navigation in Continuous Environments (VLN-CE) Project Website — VLN-CE Challenge — RxR-Habitat Challenge Official implementations
 132 Jan 2, 2023
132 Jan 2, 2023
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
 270 Jan 7, 2023
270 Jan 7, 2023

We utilize deep reinforcement learning to obtain favorable trajectories for visual-inertial system calibration.
Unified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning Update: The lastest code will be updated in this branch. Pleas
27 Dec 29, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023

linorobot2 is a ROS2 port of the linorobot package
linorobot2 is a ROS2 port of the linorobot package. If you're planning to build your own custom ROS2 robot (2WD, 4WD, Mecanum Drive) using accessible parts, then this package is for you. This repository contains launch files to easily integrate your DIY robot with Nav2 and a simulation pipeline to run and verify your experiments on a virtual robot in Gazebo.
 195 Dec 29, 2022
195 Dec 29, 2022

CLIPort: What and Where Pathways for Robotic Manipulation
CLIPort CLIPort: What and Where Pathways for Robotic Manipulation Mohit Shridhar, Lucas Manuelli, Dieter Fox CoRL 2021 CLIPort is an end-to-end imitat
 246 Dec 11, 2022
246 Dec 11, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022

PyBullet CartPole and Quadrotor environments—with CasADi symbolic a priori dynamics—for learning-based control and reinforcement learning
safe-control-gym Physics-based CartPole and Quadrotor Gym environments (using PyBullet) with symbolic a priori dynamics (using CasADi) for learning-ba
 300 Dec 28, 2022
300 Dec 28, 2022
This solves the autonomous driving issue which is supported by deep learning technology. Given a video, it splits into images and predicts the angle of turning for each frame.
Self Driving Car An autonomous car (also known as a driverless car, self-driving car, and robotic car) is a vehicle that is capable of sensing its env
 4 Sep 4, 2021
4 Sep 4, 2021
Libraries, tools and tasks created and used at DeepMind Robotics.
Libraries, tools and tasks created and used at DeepMind Robotics.
270 Nov 30, 2022
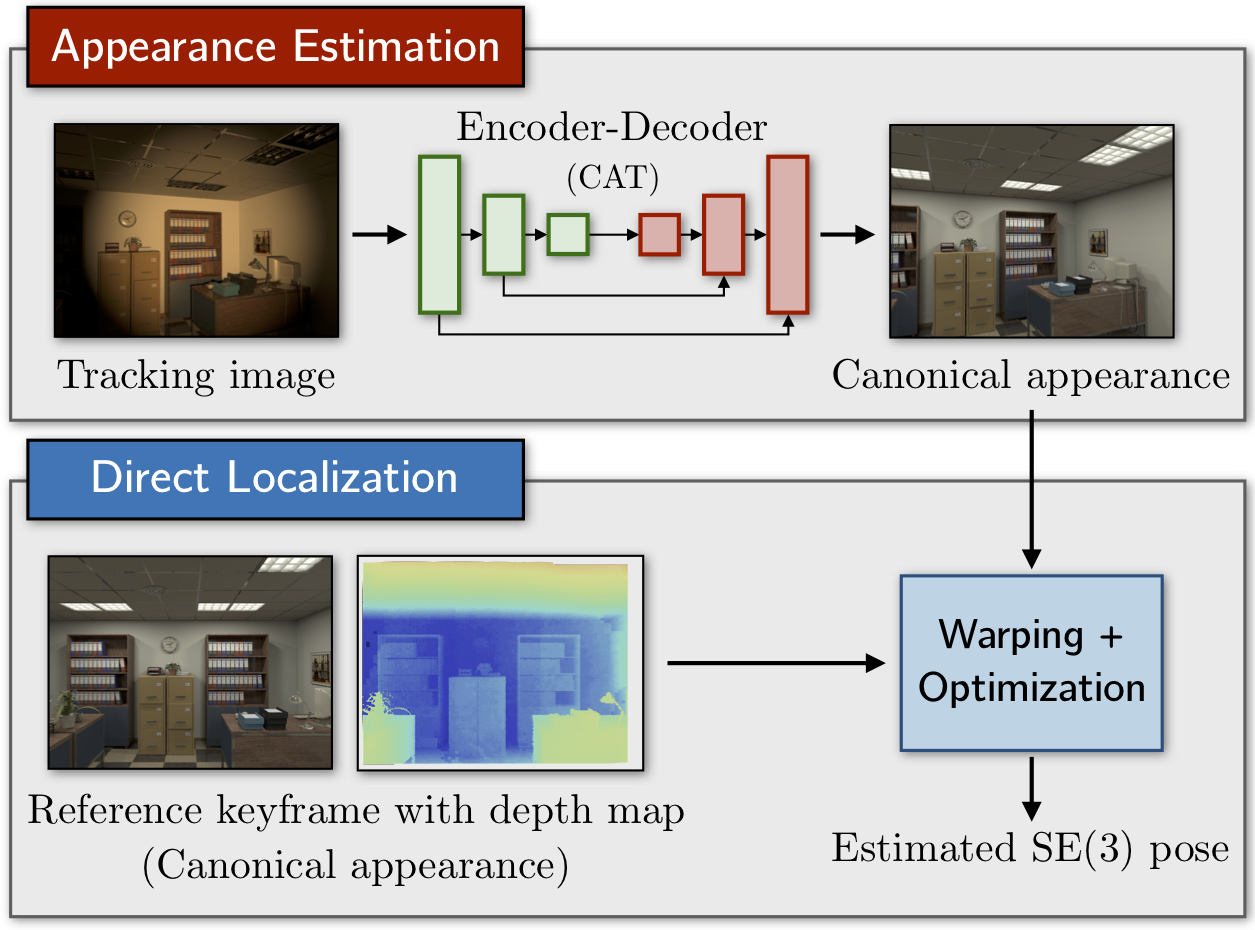
Canonical Appearance Transformations
CAT-Net: Learning Canonical Appearance Transformations Code to accompany our paper "How to Train a CAT: Learning Canonical Appearance Transformations
 54 Dec 24, 2022
54 Dec 24, 2022
YARR is Yet Another Robotics and Reinforcement learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
 21 Aug 1, 2021
21 Aug 1, 2021
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
51 Dec 27, 2022

Set of utilities for exporting/controlling your robot in Blender
Blender Robotics Utils This repository contains utilities for exporting/controlling your robot in Blender Maintainers This repository is maintained by
 33 Nov 30, 2022
33 Nov 30, 2022
![[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design](https://github.com/eanswer/DiffHand/raw/master/demos/representative_image.jpg)
[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design
DiffHand This repository contains the implementation for the paper An End-to-End Differentiable Framework for Contact-Aware Robot Design (RSS 2021). I
 60 Jan 4, 2023
60 Jan 4, 2023
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
 43 Nov 21, 2022
43 Nov 21, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
49 Nov 28, 2022
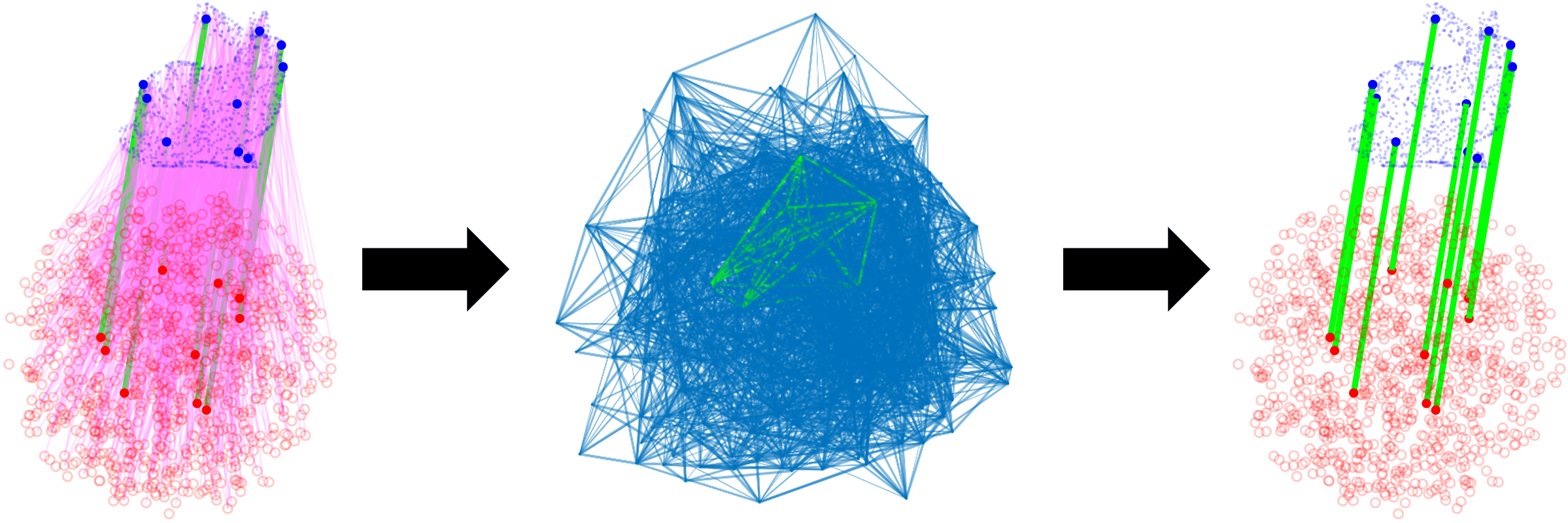
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
This is the dataset and code release of the OpenRooms Dataset.
This is the dataset and code release of the OpenRooms Dataset.
 95 Jan 8, 2023
95 Jan 8, 2023

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
44 Jan 6, 2023
Python sample codes for robotics algorithms.
PythonRobotics Python codes for robotics algorithm. Table of Contents What is this? Requirements Documentation How to use Localization Extended Kalman
 17.2k Jan 1, 2023
17.2k Jan 1, 2023

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Official PyTorch implementation of Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yu
63 Jan 3, 2023

Spatial Action Maps for Mobile Manipulation (RSS 2020)
spatial-action-maps Update: Please see our new spatial-intention-maps repository, which extends this work to multi-agent settings. It contains many ne
 27 Nov 30, 2022
27 Nov 30, 2022

Spatial Intention Maps for Multi-Agent Mobile Manipulation (ICRA 2021)
spatial-intention-maps This code release accompanies the following paper: Spatial Intention Maps for Multi-Agent Mobile Manipulation Jimmy Wu, Xingyua
70 Jan 2, 2023

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
 4.7k Jan 1, 2023
4.7k Jan 1, 2023

SSL_SLAM2: Lightweight 3-D Localization and Mapping for Solid-State LiDAR (mapping and localization separated) ICRA 2021
SSL_SLAM2 Lightweight 3-D Localization and Mapping for Solid-State LiDAR (Intel Realsense L515 as an example) This repo is an extension work of SSL_SL
 1.3k Jan 8, 2023
1.3k Jan 8, 2023

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
187 Dec 24, 2022
Safe Bayesian Optimization
SafeOpt - Safe Bayesian Optimization This code implements an adapted version of the safe, Bayesian optimization algorithm, SafeOpt [1], [2]. It also p
 111 Dec 11, 2022
111 Dec 11, 2022

Train robotic agents to learn pick and place with deep learning for vision-based manipulation in PyBullet.
Ravens is a collection of simulated tasks in PyBullet for learning vision-based robotic manipulation, with emphasis on pick and place. It features a Gym-like API with 10 tabletop rearrangement tasks, each with (i) a scripted oracle that provides expert demonstrations (for imitation learning), and (ii) reward functions that provide partial credit (for reinforcement learning).
 367 Jan 9, 2023
367 Jan 9, 2023