331 Repositories
Python point-unet Libraries
Implementation of "Fast and Flexible Temporal Point Processes with Triangular Maps" (Oral @ NeurIPS 2020)
Fast and Flexible Temporal Point Processes with Triangular Maps This repository includes a reference implementation of the algorithms described in "Fa
 20 Dec 2, 2022
20 Dec 2, 2022

Rendering Point Clouds with Compute Shaders
Compute Shader Based Point Cloud Rendering This repository contains the source code to our techreport: Rendering Point Clouds with Compute Shaders and
 460 Jan 5, 2023
460 Jan 5, 2023
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
 121 Dec 12, 2022
121 Dec 12, 2022
![[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation](https://github.com/Na-Z/attMPTI/raw/main/framework.jpg)
[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation
Few-shot 3D Point Cloud Semantic Segmentation Created by Na Zhao from National University of Singapore Introduction This repository contains the PyTor
 117 Dec 27, 2022
117 Dec 27, 2022

Self-Supervised Learning for Domain Adaptation on Point-Clouds
Self-Supervised Learning for Domain Adaptation on Point-Clouds Introduction Self-supervised learning (SSL) allows to learn useful representations from
 66 Dec 20, 2022
66 Dec 20, 2022

(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
 86 Oct 5, 2022
86 Oct 5, 2022
(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
86 Oct 5, 2022

Official PyTorch implementation of CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds Introduction This is the official PyTorch implementation of o
 96 Dec 7, 2022
96 Dec 7, 2022
A semantic segmentation toolbox based on PyTorch
Introduction vedaseg is an open source semantic segmentation toolbox based on PyTorch. Features Modular Design We decompose the semantic segmentation
 407 Dec 15, 2022
407 Dec 15, 2022
MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch, towards the next-generation platform for general 3D detection. It is a part of the OpenMMLab project developed by MMLab.
 3.2k Jan 5, 2023
3.2k Jan 5, 2023

Implementation of CVPR'21: RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction
RfD-Net [Project Page] [Paper] [Video] RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction Yinyu Nie, Ji Hou, Xiaoguang Han, Matthi
 162 Jan 6, 2023
162 Jan 6, 2023

Implementation of the "PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences" paper.
PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences Introduction Point cloud sequences are irregular and unordered in the spatial dimen
 63 Dec 9, 2022
63 Dec 9, 2022
![[PyTorch] Official implementation of CVPR2021 paper](https://github.com/XuyangBai/PointDSC/raw/master/figures/pipeline.png)
[PyTorch] Official implementation of CVPR2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency". https://arxiv.org/abs/2103.05465
PointDSC repository PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency",
 153 Dec 14, 2022
153 Dec 14, 2022

《A-CNN: Annularly Convolutional Neural Networks on Point Clouds》(2019)
A-CNN: Annularly Convolutional Neural Networks on Point Clouds Created by Artem Komarichev, Zichun Zhong, Jing Hua from Department of Computer Science
 44 Feb 24, 2022
44 Feb 24, 2022

(CVPR 2021) PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds by Mutian Xu*, Runyu Ding*, Hengshuang Zhao, and Xiaojuan Qi. Int
 228 Dec 25, 2022
228 Dec 25, 2022

The open source code of SA-UNet: Spatial Attention U-Net for Retinal Vessel Segmentation.
SA-UNet: Spatial Attention U-Net for Retinal Vessel Segmentation(ICPR 2020) Overview This code is for the paper: Spatial Attention U-Net for Retinal V
 151 Dec 28, 2022
151 Dec 28, 2022

Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021)
Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021) An efficient PyTorch library for Point Cloud Completion.
 119 Jan 2, 2023
119 Jan 2, 2023

Official implementation of YOGO for Point-Cloud Processing
You Only Group Once: Efficient Point-Cloud Processing with Token Representation and Relation Inference Module By Chenfeng Xu, Bohan Zhai, Bichen Wu, T
 67 Dec 20, 2022
67 Dec 20, 2022
这是一个unet-pytorch的源码,可以训练自己的模型
Unet:U-Net: Convolutional Networks for Biomedical Image Segmentation目标检测模型在Pytorch当中的实现 目录 性能情况 Performance 所需环境 Environment 注意事项 Attention 文件下载 Downl
 567 Jan 5, 2023
567 Jan 5, 2023
This project is the official implementation of our accepted ICLR 2021 paper BiPointNet: Binary Neural Network for Point Clouds.
BiPointNet: Binary Neural Network for Point Clouds Created by Haotong Qin, Zhongang Cai, Mingyuan Zhang, Yifu Ding, Haiyu Zhao, Shuai Yi, Xianglong Li
 59 Dec 17, 2022
59 Dec 17, 2022
Module for statistical learning, with a particular emphasis on time-dependent modelling
Operating system Build Status Linux/Mac Windows tick tick is a Python 3 module for statistical learning, with a particular emphasis on time-dependent
 410 Dec 14, 2022
410 Dec 14, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering This repository holds all the code and data for our recent work on
 118 Dec 6, 2022
118 Dec 6, 2022

A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF or LFI.
BurpParamFlagger A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF
 118 Nov 7, 2022
118 Nov 7, 2022
A general 3D Object Detection codebase in PyTorch.
Det3D is the first 3D Object Detection toolbox which provides off the box implementations of many 3D object detection algorithms such as PointPillars, SECOND, PIXOR, etc, as well as state-of-the-art methods on major benchmarks like KITTI(ViP) and nuScenes(CBGS).
 1.4k Jan 5, 2023
1.4k Jan 5, 2023
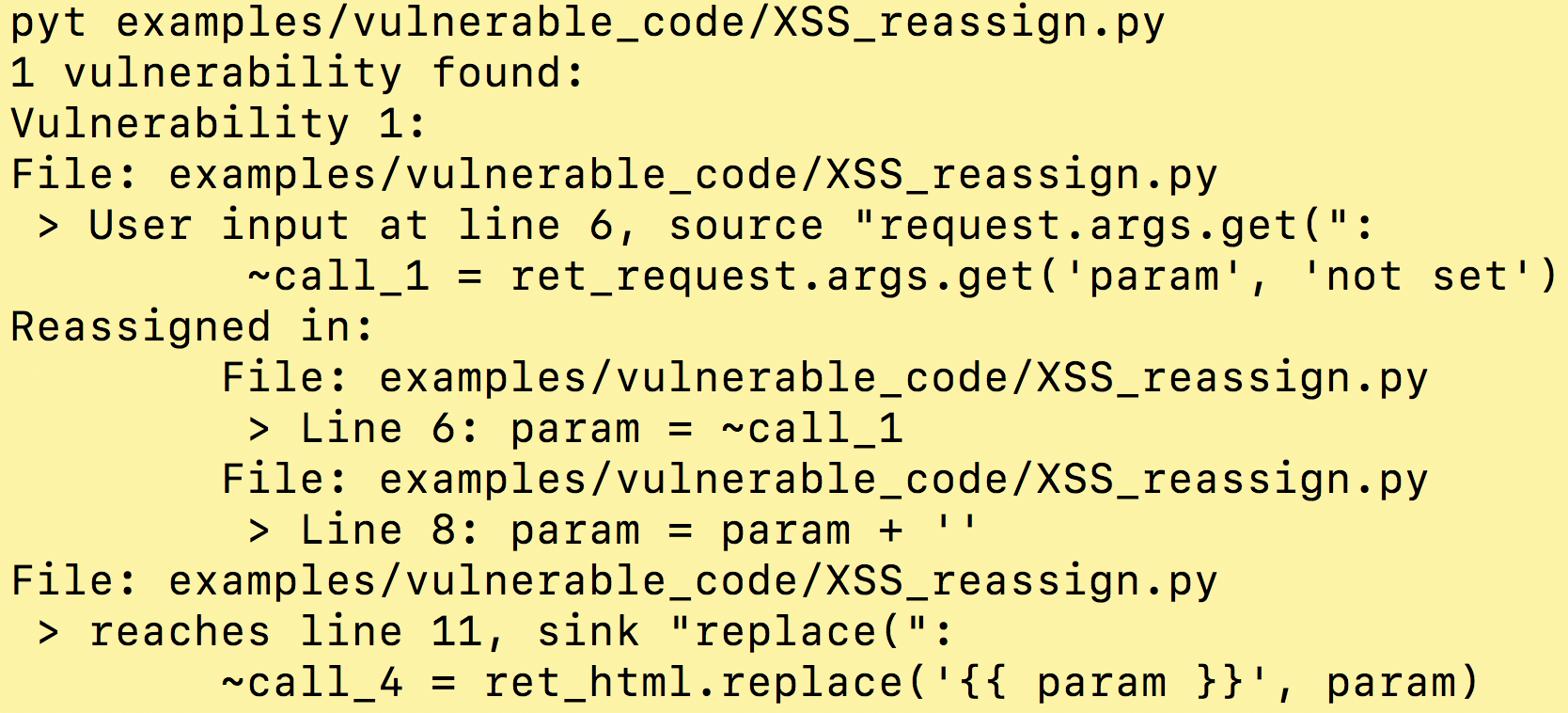
A Static Analysis Tool for Detecting Security Vulnerabilities in Python Web Applications
This project is no longer maintained March 2020 Update: Please go see the amazing Pysa tutorial that should get you up to speed finding security vulne
 2.1k Dec 25, 2022
2.1k Dec 25, 2022

Jittor implementation of PCT:Point Cloud Transformer
PCT: Point Cloud Transformer This is a Jittor implementation of PCT: Point Cloud Transformer.
 547 Jan 3, 2023
547 Jan 3, 2023

Implementation of the Point Transformer layer, in Pytorch
Point Transformer - Pytorch Implementation of the Point Transformer self-attention layer, in Pytorch. The simple circuit above seemed to have allowed
 501 Jan 3, 2023
501 Jan 3, 2023
Pytorch Implementation of Various Point Transformers
Pytorch Implementation of Various Point Transformers Recently, various methods applied transformers to point clouds: PCT: Point Cloud Transformer (Men
 434 Dec 30, 2022
434 Dec 30, 2022
Pytorch implementation of PCT: Point Cloud Transformer
PCT: Point Cloud Transformer This is a Pytorch implementation of PCT: Point Cloud Transformer.
 265 Dec 22, 2022
265 Dec 22, 2022
aka "Bayesian Methods for Hackers": An introduction to Bayesian methods + probabilistic programming with a computation/understanding-first, mathematics-second point of view. All in pure Python ;)
Bayesian Methods for Hackers Using Python and PyMC The Bayesian method is the natural approach to inference, yet it is hidden from readers behind chap
 25.1k Jan 2, 2023
25.1k Jan 2, 2023