331 Repositories
Python point-unet Libraries

PyTorch implementation of DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration (BMVC 2021)
DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration [video] [paper] [supplementary] [data] [thesis] Introduction De
 10 Dec 14, 2022
10 Dec 14, 2022

This is a GUI interface which can process forest fire detection, smoke detection and fire segmentation
This is a GUI interface which can process forest fire detection, smoke detection and fire segmentation. Yolov5 is used to detect fire and smoke and unet is used to segment fire.
 7 Jan 8, 2023
7 Jan 8, 2023

Semantic Segmentation in Pytorch. Network include: FCN、FCN_ResNet、SegNet、UNet、BiSeNet、BiSeNetV2、PSPNet、DeepLabv3_plus、 HRNet、DDRNet
🚀 If it helps you, click a star! ⭐ Update log 2020.12.10 Project structure adjustment, the previous code has been deleted, the adjustment will be re-
 269 Jan 4, 2023
269 Jan 4, 2023
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
Mixed Transformer UNet for Medical Image Segmentation
MT-UNet Update 2021/11/19 Thank you for your interest in our work. We have uploaded the code of our MTUNet to help peers conduct further research on i
 92 Dec 25, 2022
92 Dec 25, 2022

Neural Point-Based Graphics
Neural Point-Based Graphics Project Video Paper Neural Point-Based Graphics Kara-Ali Aliev1 Artem Sevastopolsky1,2 Maria Kolos1,2 Dmitry Ulyanov3
 252 Dec 13, 2022
252 Dec 13, 2022

Tensorflow implementation of ID-Unet: Iterative Soft and Hard Deformation for View Synthesis.
ID-Unet: Iterative-view-synthesis(CVPR2021 Oral) Tensorflow implementation of ID-Unet: Iterative Soft and Hard Deformation for View Synthesis. Overvie
 17 Aug 23, 2022
17 Aug 23, 2022
Using pytorch to implement unet network for liver image segmentation.
Using pytorch to implement unet network for liver image segmentation.
 1 Dec 17, 2021
1 Dec 17, 2021

Implementation of U-Net and SegNet for building segmentation
Specialized project Created by Katrine Nguyen and Martin Wangen-Eriksen as a part of our specialized project at Norwegian University of Science and Te
 3 Dec 7, 2022
3 Dec 7, 2022

Centroid-UNet is deep neural network model to detect centroids from satellite images.
Centroid UNet - Locating Object Centroids in Aerial/Serial Images Introduction Centroid-UNet is deep neural network model to detect centroids from Aer
 19 Dec 8, 2022
19 Dec 8, 2022

MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity
MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity Introduction The 3D LiDAR place recognition aim
 16 Dec 8, 2022
16 Dec 8, 2022

Get 2D point positions (e.g., facial landmarks) projected on 3D mesh
points2d_projection_mesh Input 2D points (e.g. facial landmarks) on an image Camera parameters (extrinsic and intrinsic) of the image Aligned 3D mesh
 5 Dec 8, 2022
5 Dec 8, 2022
BT-Unet: A-Self-supervised-learning-framework-for-biomedical-image-segmentation-using-Barlow-Twins
BT-Unet: A-Self-supervised-learning-framework-for-biomedical-image-segmentation-using-Barlow-Twins Deep learning has brought most profound contributio
 12 Dec 4, 2022
12 Dec 4, 2022
Official Implementation of SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations
Official Implementation of SimIPU SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations Since
 37 Dec 1, 2022
37 Dec 1, 2022
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
 4 Jul 19, 2022
4 Jul 19, 2022
![[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences](https://github.com/hongfz16/Garment4D/raw/main/assets/cover.jpg)
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
 51 Dec 10, 2021
51 Dec 10, 2021
Public repository of the 3DV 2021 paper "Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds"
Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds Björn Michele1), Alexandre Boulch1), Gilles Puy1), Maxime Bucher1) and Rena
 15 Dec 22, 2022
15 Dec 22, 2022
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion This repo intends to release code for our work: Zhaoyang Lyu*, Zhifeng
 68 Jan 3, 2023
68 Jan 3, 2023
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
112 Dec 23, 2022
Bayesian Deep Learning and Deep Reinforcement Learning for Object Shape Error Response and Correction of Manufacturing Systems
Bayesian Deep Learning for Manufacturing 2.0 (dlmfg) Object Shape Error Response (OSER) Digital Lifecycle Management - In Process Quality Improvement
 30 Oct 31, 2022
30 Oct 31, 2022
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021)
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021) This is the implementation of PSD (ICCV 2021),
 12 Dec 12, 2022
12 Dec 12, 2022

U-Net Brain Tumor Segmentation
U-Net Brain Tumor Segmentation 🚀 :Feb 2019 the data processing implementation in this repo is not the fastest way (code need update, contribution is
 448 Jan 2, 2023
448 Jan 2, 2023

🗺 General purpose U-Network implemented in Keras for image segmentation
TF-Unet General purpose U-Network implemented in Keras for image segmentation Getting started • Training • Evaluation Getting started Looking for Jupy
 2 Aug 31, 2022
2 Aug 31, 2022

PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds
PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds PCAM: Product of Cross-Attention Matrices for Rigid Registration of P
24 May 31, 2022

This is a file about Unet implemented in Pytorch
Unet this is an implemetion of Unet in Pytorch and it's architecture is as follows which is the same with paper of Unet component of Unet Convolution
 1 Dec 3, 2021
1 Dec 3, 2021

Diffusion Probabilistic Models for 3D Point Cloud Generation (CVPR 2021)
Diffusion Probabilistic Models for 3D Point Cloud Generation [Paper] [Code] The official code repository for our CVPR 2021 paper "Diffusion Probabilis
 323 Jan 5, 2023
323 Jan 5, 2023

Score-Based Point Cloud Denoising (ICCV'21)
Score-Based Point Cloud Denoising (ICCV'21) [Paper] https://arxiv.org/abs/2107.10981 Installation Recommended Environment The code has been tested in
79 Dec 26, 2022

Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds DLO is a lightweight and computationally-efficient frontend LiDAR odometry solution w
 369 Dec 30, 2022
369 Dec 30, 2022
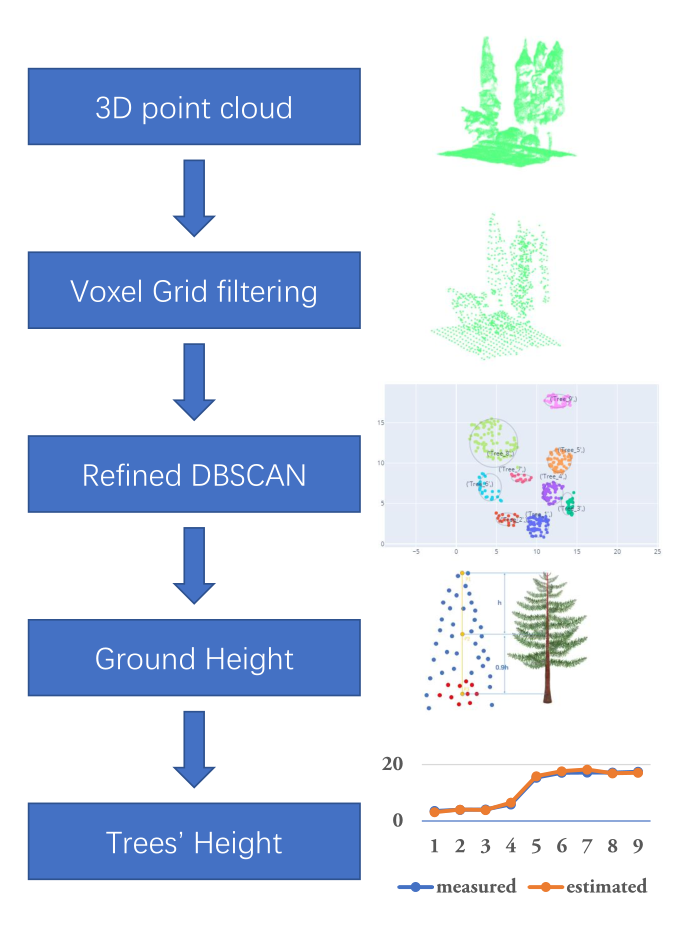
A simple algorithm for extracting tree height in sparse scene from point cloud data.
TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING This is the offical python implementation of the paper "Tree Height Extraction in
 6 Oct 28, 2022
6 Oct 28, 2022
Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
XDR Tuner Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
 16 Dec 28, 2022
16 Dec 28, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022
Official Keras Implementation for UNet++ in IEEE Transactions on Medical Imaging and DLMIA 2018
UNet++: A Nested U-Net Architecture for Medical Image Segmentation UNet++ is a new general purpose image segmentation architecture for more accurate i
 1.8k Jan 7, 2023
1.8k Jan 7, 2023

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
 957 Dec 21, 2022
957 Dec 21, 2022

Official implementation of Representer Point Selection via Local Jacobian Expansion for Post-hoc Classifier Explanation of Deep Neural Networks and Ensemble Models at NeurIPS 2021
Representer Point Selection via Local Jacobian Expansion for Classifier Explanation of Deep Neural Networks and Ensemble Models This repository is the
 2 Dec 1, 2021
2 Dec 1, 2021
This is the face keypoint train code of project face-detection-project
face-key-point-pytorch 1. Data structure The structure of landmarks_jpg is like below: |--landmarks_jpg |----AFW |------AFW_134212_1_0.jpg |------AFW_
 3 Nov 27, 2022
3 Nov 27, 2022

Pre-Training 3D Point Cloud Transformers with Masked Point Modeling
Point-BERT: Pre-Training 3D Point Cloud Transformers with Masked Point Modeling Created by Xumin Yu*, Lulu Tang*, Yongming Rao*, Tiejun Huang, Jie Zho
 306 Jan 6, 2023
306 Jan 6, 2023
PyTorch implementation of Pointnet2/Pointnet++
Pointnet2/Pointnet++ PyTorch Project Status: Unmaintained. Due to finite time, I have no plans to update this code and I will not be responding to iss
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

Kernel Point Convolutions
Created by Hugues THOMAS Introduction Update 27/04/2020: New PyTorch implementation available. With SemanticKitti, and Windows supported. This reposit
 584 Jan 7, 2023
584 Jan 7, 2023

PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud, CVPR 2019.
PointRCNN PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud Code release for the paper PointRCNN:3D Object Proposal Generation a
 1.5k Dec 27, 2022
1.5k Dec 27, 2022

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
 3.2k Dec 31, 2022
3.2k Dec 31, 2022
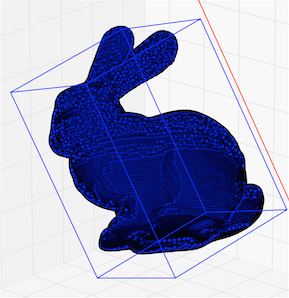
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
ApproxMVBB Status Build UnitTests Homepage Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in
 390 Dec 31, 2022
390 Dec 31, 2022
Spatial Sparse Convolution Library
SpConv: Spatially Sparse Convolution Library PyPI Install Downloads CPU (Linux Only) pip install spconv CUDA 10.2 pip install spconv-cu102 CUDA 11.1 p
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

Point Cloud Registration Network
PCRNet: Point Cloud Registration Network using PointNet Encoding Source Code Author: Vinit Sarode and Xueqian Li Paper | Website | Video | Pytorch Imp
 59 Nov 19, 2022
59 Nov 19, 2022

Source code for Fixed-Point GAN for Cloud Detection
FCD: Fixed-Point GAN for Cloud Detection PyTorch source code of Nyborg & Assent (2020). Abstract The detection of clouds in satellite images is an ess
 8 Dec 22, 2022
8 Dec 22, 2022

Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
 29 Nov 25, 2021
29 Nov 25, 2021

Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes
Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes [Paper] Method overview 4DMatch Benchmark 4DMatch is a benchmark for matc
 103 Jan 6, 2023
103 Jan 6, 2023

Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion". Paper link: https://arxiv.org/abs/2111.10
 10 Nov 24, 2021
10 Nov 24, 2021

A hybrid SOTA solution of LiDAR panoptic segmentation with C++ implementations of point cloud clustering algorithms. ICCV21, Workshop on Traditional Computer Vision in the Age of Deep Learning
ICCVW21-TradiCV-Survey-of-LiDAR-Cluster Motivation In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a
 103 Nov 22, 2022
103 Nov 22, 2022
Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
93 Dec 15, 2022
Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS)
This repository contains tools to simulate the ground filtering process of a registered point cloud. The repository contains two filtering methods. The first method uses a normal vector, and fit to plane. The second method utilizes voxel adjacency, and fit to plane.
 5 Aug 25, 2022
5 Aug 25, 2022

PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018
PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place
 294 Dec 12, 2022
294 Dec 12, 2022

Ultra-lightweight human body posture key point CNN model. ModelSize:2.3MB HUAWEI P40 NCNN benchmark: 6ms/img,
Ultralight-SimplePose Support NCNN mobile terminal deployment Based on MXNET(=1.5.1) GLUON(=0.7.0) framework Top-down strategy: The input image is t
 223 Dec 27, 2022
223 Dec 27, 2022
Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion" Coming soon, as soon as I finish a
14 Feb 26, 2022

Some method of processing point cloud
Point-Cloud Some method of processing point cloud inversion the completion pointcloud to incomplete point cloud Some model of encoding point cloud to
 1 Nov 19, 2021
1 Nov 19, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
 11 Dec 9, 2022
11 Dec 9, 2022
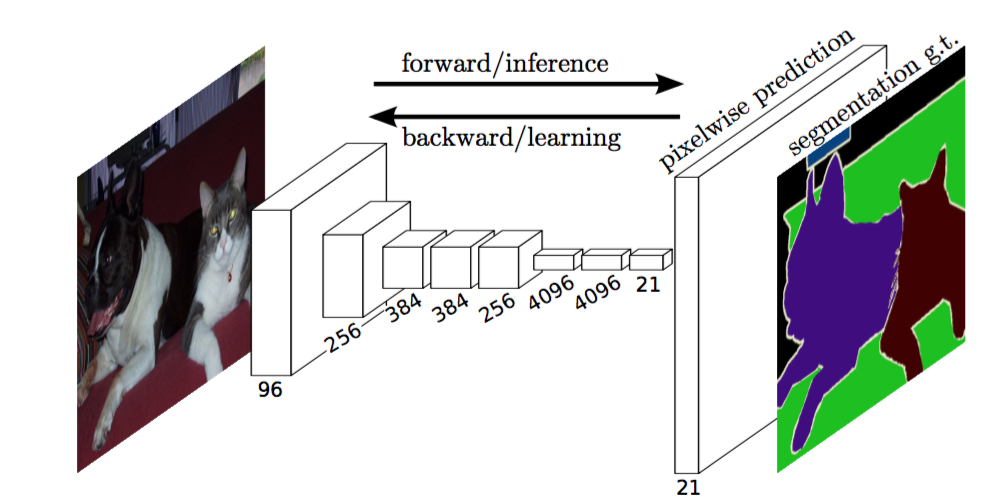
Unofficial implementation of Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segmentation
Point-Unet This is an unofficial implementation of the MICCAI 2021 paper Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segment
9 Dec 7, 2022

Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks
Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks This is a Pytorch-Lightning implementation of the paper "Self-s
111 Dec 6, 2022
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom. Also, rasterize shapefile vectors as corresponding label image.
 2 Nov 22, 2021
2 Nov 22, 2021

Object detection, 3D detection, and pose estimation using center point detection:
Objects as Points Object detection, 3D detection, and pose estimation using center point detection: Objects as Points, Xingyi Zhou, Dequan Wang, Phili
 6.7k Jan 3, 2023
6.7k Jan 3, 2023

PyTorch Code for "Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning"
Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning [Project Page] [Paper] Wenlong Huang1, Igor Mordatch2, Pieter Abbeel1,
 40 Nov 22, 2022
40 Nov 22, 2022

PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages
PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages Abstract NLP applications for code-mixed (CM) or mix-li
 1 Nov 12, 2021
1 Nov 12, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
11 Dec 9, 2022
Point detection through multi-instance deep heatmap regression for sutures in endoscopy
Suture detection PyTorch This repo contains the reference implementation of suture detection model in PyTorch for the paper Point detection through mu
 3 Jul 16, 2022
3 Jul 16, 2022
PyTorch implementation of UNet++ (Nested U-Net).
PyTorch implementation of UNet++ (Nested U-Net) This repository contains code for a image segmentation model based on UNet++: A Nested U-Net Architect
 642 Jan 4, 2023
642 Jan 4, 2023
Official Keras Implementation for UNet++ in IEEE Transactions on Medical Imaging and DLMIA 2018
UNet++: A Nested U-Net Architecture for Medical Image Segmentation UNet++ is a new general purpose image segmentation architecture for more accurate i
1.8k Dec 27, 2022
PSANet: Point-wise Spatial Attention Network for Scene Parsing, ECCV2018.
PSANet: Point-wise Spatial Attention Network for Scene Parsing (in construction) by Hengshuang Zhao*, Yi Zhang*, Shu Liu, Jianping Shi, Chen Change Lo
 217 Oct 30, 2022
217 Oct 30, 2022
Segmentation models with pretrained backbones. Keras and TensorFlow Keras.
Python library with Neural Networks for Image Segmentation based on Keras and TensorFlow. The main features of this library are: High level API (just
 4.2k Jan 9, 2023
4.2k Jan 9, 2023
UNet model with VGG11 encoder pre-trained on Kaggle Carvana dataset
TernausNet: U-Net with VGG11 Encoder Pre-Trained on ImageNet for Image Segmentation By Vladimir Iglovikov and Alexey Shvets Introduction TernausNet is
 1k Dec 28, 2022
1k Dec 28, 2022

Retina blood vessel segmentation with a convolutional neural network
Retina blood vessel segmentation with a convolution neural network (U-net) This repository contains the implementation of a convolutional neural netwo
 1.2k Jan 6, 2023
1.2k Jan 6, 2023
Implementation of Segnet, FCN, UNet , PSPNet and other models in Keras.
Image Segmentation Keras : Implementation of Segnet, FCN, UNet, PSPNet and other models in Keras. Implementation of various Deep Image Segmentation mo
 2.6k Jan 5, 2023
2.6k Jan 5, 2023

Modification of convolutional neural net "UNET" for image segmentation in Keras framework
ZF_UNET_224 Pretrained Model Modification of convolutional neural net "UNET" for image segmentation in Keras framework Requirements Python 3.*, Keras
 209 Nov 2, 2022
209 Nov 2, 2022

unet for image segmentation
Implementation of deep learning framework -- Unet, using Keras The architecture was inspired by U-Net: Convolutional Networks for Biomedical Image Seg
 4.1k Dec 31, 2022
4.1k Dec 31, 2022
![Models Supported: AlbUNet [18, 34, 50, 101, 152] (1D and 2D versions for Single and Multiclass Segmentation, Feature Extraction with supports for Deep Supervision and Guided Attention)](https://github.com/Sakib1263/AlbUNet-1D-2D-Tensorflow-Keras/raw/main/Documents/Images/AlbuNet.png)
Models Supported: AlbUNet [18, 34, 50, 101, 152] (1D and 2D versions for Single and Multiclass Segmentation, Feature Extraction with supports for Deep Supervision and Guided Attention)
AlbUNet-1D-2D-Tensorflow-Keras This repository contains 1D and 2D Signal Segmentation Model Builder for AlbUNet and several of its variants developed
 1 Nov 15, 2021
1 Nov 15, 2021
Weakly Supervised 3D Object Detection from Point Cloud with Only Image Level Annotation
SCCKTIM Weakly Supervised 3D Object Detection from Point Cloud with Only Image-Level Annotation Our code will be available soon. The class knowledge t
 1 Nov 12, 2021
1 Nov 12, 2021
Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation".
FPS-Net Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation", accepted by ISPRS journal of Photogrammetry
 15 Nov 30, 2022
15 Nov 30, 2022
Computationally efficient algorithm that identifies boundary points of a point cloud.
BoundaryTest Included are MATLAB and Python packages, each of which implement efficient algorithms for boundary detection and normal vector estimation
 6 Dec 9, 2022
6 Dec 9, 2022
6D Grasping Policy for Point Clouds
GA-DDPG [website, paper] Installation git clone https://github.com/liruiw/GA-DDPG.git --recursive Setup: Ubuntu 16.04 or above, CUDA 10.0 or above, py
 48 Dec 21, 2022
48 Dec 21, 2022
![[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration](https://github.com/ispc-lab/HRegNet/raw/main/assets/overall.png)
[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration Introduction The repository contains the source code and pre-tr
 55 Dec 14, 2022
55 Dec 14, 2022

Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (ICCV 2021)
Exploring Simple 3D Multi-Object Tracking for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Exploring Simple 3D Multi-Object Tracking for
 141 Nov 21, 2022
141 Nov 21, 2022
![[ICCV' 21]](https://github.com/hansen7/OcCo/raw/master/assets/teaser.png)
[ICCV' 21] "Unsupervised Point Cloud Pre-training via Occlusion Completion"
OcCo: Unsupervised Point Cloud Pre-training via Occlusion Completion This repository is the official implementation of paper: "Unsupervised Point Clou
 204 Dec 24, 2022
204 Dec 24, 2022
A wrapper for webdriver that is a jumping off point for web automation.
Webdriver Automation Plus ===================================== Description: Tests the user can save messages then find them in search and Saved items
 1 Nov 8, 2021
1 Nov 8, 2021

Codes for CVPR2021 paper "PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization"
PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization (CVPR 2021) This is the official implementation of PW
42 Dec 18, 2022

Distributing Deep Learning Hyperparameter Tuning for 3D Medical Image Segmentation
DistMIS Distributing Deep Learning Hyperparameter Tuning for 3D Medical Image Segmentation. DistriMIS Distributing Deep Learning Hyperparameter Tuning
 2 Sep 9, 2022
2 Sep 9, 2022
code for Fast Point Cloud Registration with Optimal Transport
robot This is the repository for the paper "Accurate Point Cloud Registration with Robust Optimal Transport". We are in the process of refactoring the
 28 Jan 4, 2023
28 Jan 4, 2023

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
![DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]](https://github.com/ai4ce/DiscoNet/raw/main/img.png)
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021] Yiming Li, Shunli Ren, Pengxiang Wu, Siheng Chen, Chen Feng
 98 Dec 21, 2022
98 Dec 21, 2022
Pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021).
Pytorch code for SS-Net This is a pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021). Environment Code is tested
 1 May 18, 2022
1 May 18, 2022

PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration (NeurIPS 2021) PyTorch implementation of the paper: CoFiNet: Reli
 42 Oct 30, 2021
42 Oct 30, 2021
This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape
Metashape-Utils This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape, given a set of 2D coordinates
 4 Nov 7, 2022
4 Nov 7, 2022

UI for converting various point cloud file formats
Point cloud format converter This coverter based on open3d. If you're using old ROS1 i suggest to use conda python3 evn to install requirements. Todo
 1 Oct 29, 2021
1 Oct 29, 2021
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
76 Jan 3, 2023

The official codes for the ICCV2021 Oral presentation "Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework"
P2PNet (ICCV2021 Oral Presentation) This repository contains codes for the official implementation in PyTorch of P2PNet as described in Rethinking Cou
 208 Dec 26, 2022
208 Dec 26, 2022

Implementation of UNET architecture for Image Segmentation.
Semantic Segmentation using UNET This is the implementation of UNET on Carvana Image Masking Kaggle Challenge About the Dataset This dataset contains
 4 Dec 21, 2021
4 Dec 21, 2021

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
 19 Sep 20, 2022
19 Sep 20, 2022

Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching
Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching This is our attempt of the shared task on Quan
 12 Jul 8, 2022
12 Jul 8, 2022

Hierarchical probabilistic 3D U-Net, with attention mechanisms (—𝘈𝘵𝘵𝘦𝘯𝘵𝘪𝘰𝘯 𝘜-𝘕𝘦𝘵, 𝘚𝘌𝘙𝘦𝘴𝘕𝘦𝘵) and a nested decoder structure with deep supervision (—𝘜𝘕𝘦𝘵++).
Hierarchical probabilistic 3D U-Net, with attention mechanisms (—𝘈𝘵𝘵𝘦𝘯𝘵𝘪𝘰𝘯 𝘜-𝘕𝘦𝘵, 𝘚𝘌𝘙𝘦𝘴𝘕𝘦𝘵) and a nested decoder structure with deep supervision (—𝘜𝘕𝘦𝘵++). Built in TensorFlow 2.5. Configured for voxel-level clinically significant prostate cancer detection in multi-channel 3D bpMRI scans.
 32 Dec 8, 2022
32 Dec 8, 2022

Visualize the electric field of a point charge network.
ElectriPy ⚡ Visualize the electric field of a point charges network. 🔌 Installation Install ElectriPy package: $ pip install electripy You are all d
 29 Aug 29, 2022
29 Aug 29, 2022

A LiDAR point cloud cluster for panoptic segmentation
Divide-and-Merge-LiDAR-Panoptic-Cluster A demo video of our method with semantic prior: More information will be coming soon! As a PhD student, I don'
65 Dec 22, 2022

pytorch implementation of the ICCV'21 paper "MVTN: Multi-View Transformation Network for 3D Shape Recognition"
MVTN: Multi-View Transformation Network for 3D Shape Recognition (ICCV 2021) By Abdullah Hamdi, Silvio Giancola, Bernard Ghanem Paper | Video | Tutori
 64 Jan 3, 2023
64 Jan 3, 2023