22 Repositories
Python voxel Libraries

Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR 2022)
Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR2022)[paper] Authors: Chenhang He, Ruihuang Li, Shuai Li, L
 141 Dec 30, 2022
141 Dec 30, 2022

for taichi voxel-challange event
Taichi Voxel Challenge Figure: result of python3 example6.py. Please replace the image above (demo.jpg) with yours, so that other people can immediate
 20 Nov 26, 2022
20 Nov 26, 2022

Official implementation of VaxNeRF (Voxel-Accelearated NeRF).
VaxNeRF Paper | Google Colab This is the official implementation of VaxNeRF (Voxel-Accelearated NeRF). VaxNeRF provides very fast training and slightl
 132 Nov 21, 2022
132 Nov 21, 2022

Python code to fuse multiple RGB-D images into a TSDF voxel volume.
Volumetric TSDF Fusion of RGB-D Images in Python This is a lightweight python script that fuses multiple registered color and depth images into a proj
 845 Jan 3, 2023
845 Jan 3, 2023

Implementation of Shape Generation and Completion Through Point-Voxel Diffusion
Shape Generation and Completion Through Point-Voxel Diffusion Project | Paper Implementation of Shape Generation and Completion Through Point-Voxel Di
 103 Dec 29, 2022
103 Dec 29, 2022
Voxel-based Network for Shape Completion by Leveraging Edge Generation (ICCV 2021, oral)
Voxel-based Network for Shape Completion by Leveraging Edge Generation This is the PyTorch implementation for the paper "Voxel-based Network for Shape
 10 Dec 4, 2022
10 Dec 4, 2022

This repository contains the code needed to train Mega-NeRF models and generate the sparse voxel octrees
Mega-NeRF This repository contains the code needed to train Mega-NeRF models and generate the sparse voxel octrees used by the Mega-NeRF-Dynamic viewe
 260 Dec 28, 2022
260 Dec 28, 2022

Open source code for the paper of Neural Sparse Voxel Fields.
Neural Sparse Voxel Fields (NSVF) Project Page | Video | Paper | Data Photo-realistic free-viewpoint rendering of real-world scenes using classical co
 647 Dec 27, 2022
647 Dec 27, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
This is the official implementation of VaxNeRF (Voxel-Accelearated NeRF).
VaxNeRF Paper | Google Colab This is the official implementation of VaxNeRF (Voxel-Accelearated NeRF). This codebase is implemented using JAX, buildin
132 Nov 21, 2022

Single/multi view image(s) to voxel reconstruction using a recurrent neural network
3D-R2N2: 3D Recurrent Reconstruction Neural Network This repository contains the source codes for the paper Choy et al., 3D-R2N2: A Unified Approach f
 1.2k Dec 27, 2022
1.2k Dec 27, 2022

Sketch-Based 3D Exploration with Stacked Generative Adversarial Networks
pix2vox [Demonstration video] Sketch-Based 3D Exploration with Stacked Generative Adversarial Networks. Generated samples Single-category generation M
 232 Nov 14, 2022
232 Nov 14, 2022

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
Kimimaro: Skeletonize Densely Labeled Images
Kimimaro: Skeletonize Densely Labeled Images # Produce SWC files from volumetric images. kimimaro forge labels.npy --progress # writes to ./kimimaro_o
 92 Dec 17, 2022
92 Dec 17, 2022
Point cloud processing tool library.
Point Cloud ToolBox This point cloud processing tool library can be used to process point clouds, 3d meshes, and voxels. Environment python 3.7.5 Dep
 40 Dec 9, 2022
40 Dec 9, 2022

The all new way to turn your boring vector meshes into the new fad in town; Voxels!
Voxelator The all new way to turn your boring vector meshes into the new fad in town; Voxels! Notes: I have not tested this on a rotated mesh. With fu
 6 Feb 3, 2022
6 Feb 3, 2022
Voxel Transformer for 3D object detection
Voxel Transformer This is a reproduced repo of Voxel Transformer for 3D object detection. The code is mainly based on OpenPCDet. Introduction We provi
 173 Dec 25, 2022
173 Dec 25, 2022

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022
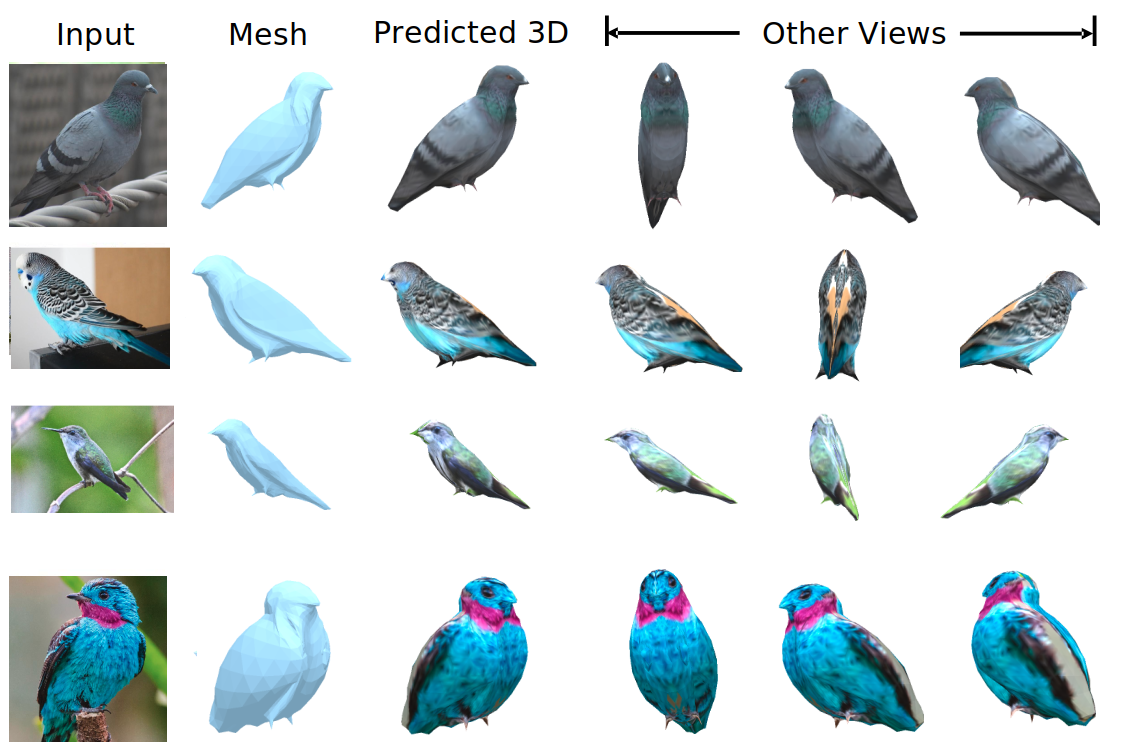
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

Implementation of ICCV2021(Oral) paper - VMNet: Voxel-Mesh Network for Geodesic-aware 3D Semantic Segmentation
VMNet: Voxel-Mesh Network for Geodesic-Aware 3D Semantic Segmentation Created by Zeyu HU Introduction This work is based on our paper VMNet: Voxel-Mes
 82 Dec 27, 2022
82 Dec 27, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022