556 Repositories
Python temporal-point-process Libraries
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
 101 Dec 5, 2022
101 Dec 5, 2022
jq for Python programmers Process JSON and HTML on the command-line with familiar syntax.
jq for Python programmers Process JSON and HTML on the command-line with familiar syntax.
 3 Jan 9, 2022
3 Jan 9, 2022
AIL LeakFeeder: A Module for AIL Framework that automate the process to feed leaked files automatically to AIL
AIL LeakFeeder: A Module for AIL Framework that automates the process to feed leaked files automatically to AIL, So basically this feeder will help you ingest AIL with your leaked files automatically.
 8 May 3, 2022
8 May 3, 2022

You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors
You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors In this paper, we propose a novel local descriptor-based fra
 80 Dec 15, 2022
80 Dec 15, 2022

CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework
CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework This repository contains a framework for Recommender Systems (RecSys), a
 8 Jul 3, 2022
8 Jul 3, 2022

Deep Learning for 3D Point Clouds: A Survey (IEEE TPAMI, 2020)
🔥Deep Learning for 3D Point Clouds (IEEE TPAMI, 2020)
 1.4k Jan 8, 2023
1.4k Jan 8, 2023
pyntcloud is a Python library for working with 3D point clouds.
pyntcloud is a Python library for working with 3D point clouds.
 1.2k Jan 7, 2023
1.2k Jan 7, 2023
Official implementation of deep Gaussian process (DGP)-based multi-speaker speech synthesis with PyTorch.
Multi-speaker DGP This repository provides official implementation of deep Gaussian process (DGP)-based multi-speaker speech synthesis with PyTorch. O
 24 Sep 7, 2022
24 Sep 7, 2022
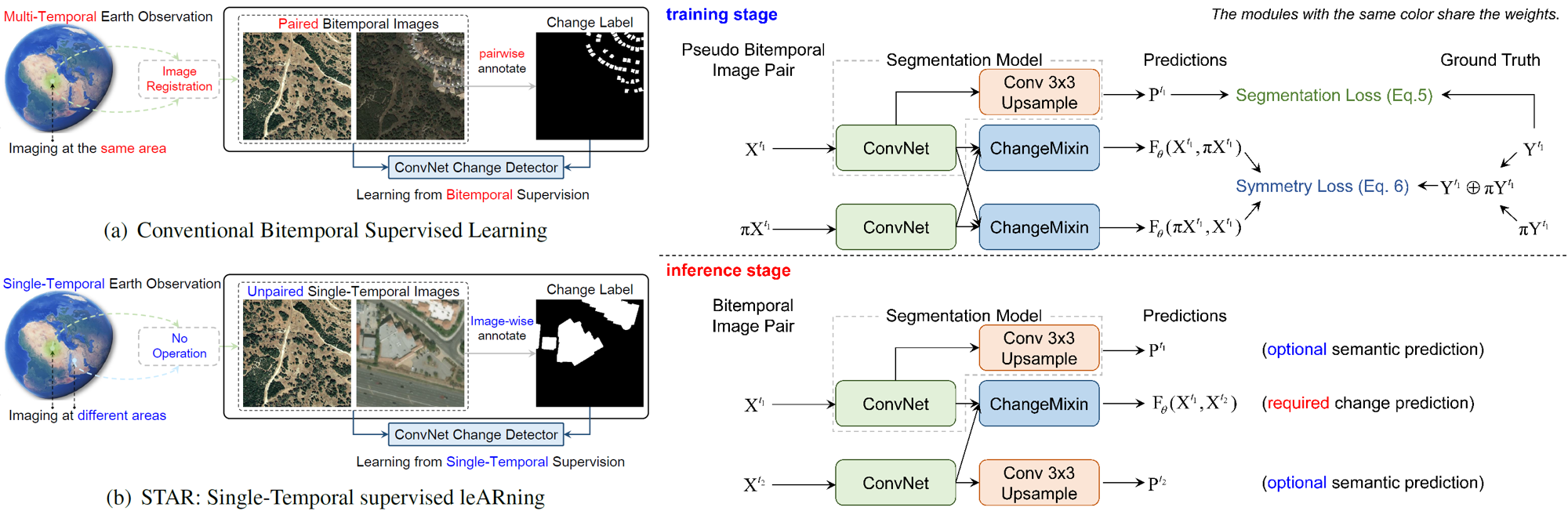
Change is Everywhere: Single-Temporal Supervised Object Change Detection in Remote Sensing Imagery (ICCV 2021)
Change is Everywhere Single-Temporal Supervised Object Change Detection in Remote Sensing Imagery by Zhuo Zheng, Ailong Ma, Liangpei Zhang and Yanfei
 125 Dec 13, 2022
125 Dec 13, 2022
Temporal Segment Networks (TSN) in PyTorch
TSN-Pytorch We have released MMAction, a full-fledged action understanding toolbox based on PyTorch. It includes implementation for TSN as well as oth
 1k Jan 3, 2023
1k Jan 3, 2023

The official implementation of ICCV paper "Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds".
Box-Aware Tracker (BAT) Pytorch-Lightning implementation of the Box-Aware Tracker. Box-Aware Feature Enhancement for Single Object Tracking on Point C
 5 Mar 26, 2022
5 Mar 26, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal Action Localization' (ICCV-21 Oral)
Learning-Action-Completeness-from-Points Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal A
 67 Jan 3, 2023
67 Jan 3, 2023
Pip-package for trajectory benchmarking from "Be your own Benchmark: No-Reference Trajectory Metric on Registered Point Clouds", ECMR'21
Map Metrics for Trajectory Quality Map metrics toolkit provides a set of metrics to quantitatively evaluate trajectory quality via estimating consiste
 31 Oct 28, 2022
31 Oct 28, 2022

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 2, 2022
22 Dec 2, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Code and models for ICCV2021 paper "Robust Object Detection via Instance-Level Temporal Cycle Confusion".
Robust Object Detection via Instance-Level Temporal Cycle Confusion This repo contains the implementation of the ICCV 2021 paper, Robust Object Detect
 69 Oct 13, 2022
69 Oct 13, 2022

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022
Reproduction process of AlexNet
PaddlePaddle论文复现杂谈 背景 注:该repo基于PaddlePaddle,对AlexNet进行复现。时间仓促,难免有所疏漏,如果问题或者想法,欢迎随时提issue一块交流。 飞桨论文复现赛地址:https://aistudio.baidu.com/aistudio/competitio
 19 Nov 29, 2022
19 Nov 29, 2022

LOC-FLOW is an “hands-free” earthquake location workflow to process continuous seismic records
LOC-FLOW is an “hands-free” earthquake location workflow to process continuous seismic records: from raw waveforms to well located earthquakes with magnitude calculations. The package assembles several popular routines for sequential earthquake location refinements, suitable for catalog building ranging from local to regional scales.
 71 Jan 9, 2023
71 Jan 9, 2023

This is the official code of our paper "Diversity-based Trajectory and Goal Selection with Hindsight Experience Relay" (PRICAI 2021)
Diversity-based Trajectory and Goal Selection with Hindsight Experience Replay This is the official implementation of our paper "Diversity-based Traje
 6 Jul 18, 2022
6 Jul 18, 2022
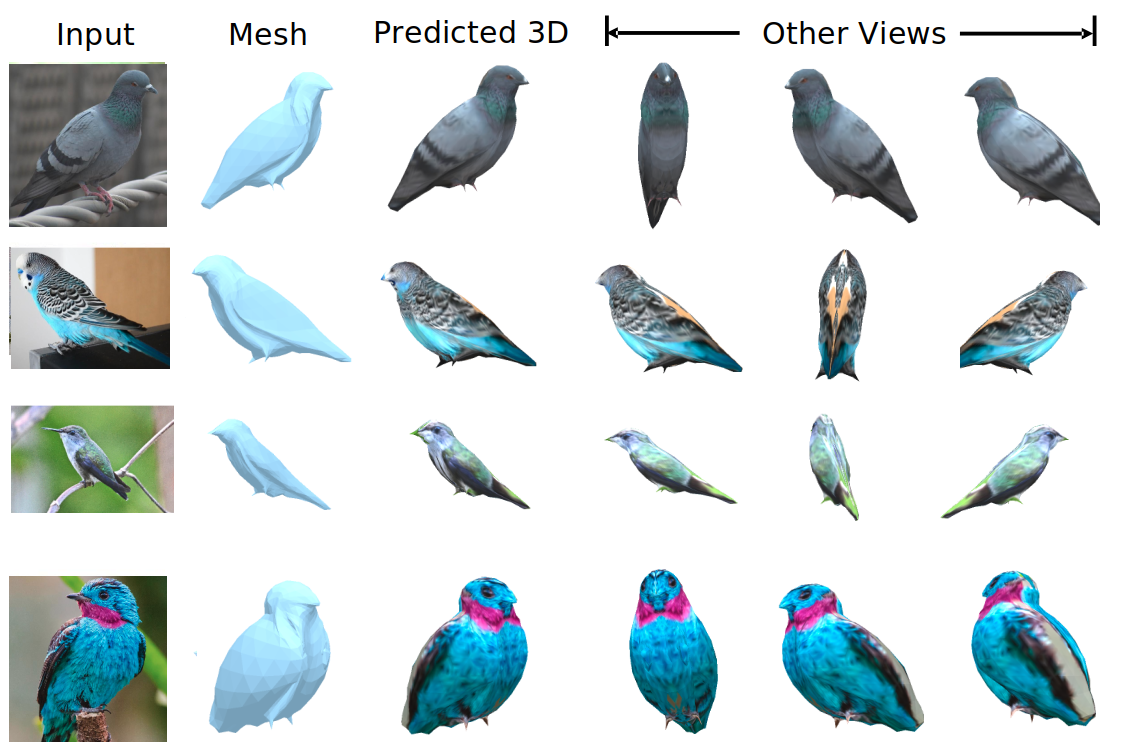
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022
自然言語で書かれた時間情報表現を抽出/規格化するルールベースの解析器
ja-timex 自然言語で書かれた時間情報表現を抽出/規格化するルールベースの解析器 概要 ja-timex は、現代日本語で書かれた自然文に含まれる時間情報表現を抽出しTIMEX3と呼ばれるアノテーション仕様に変換することで、プログラムが利用できるような形に規格化するルールベースの解析器です。
 116 Nov 9, 2022
116 Nov 9, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
 27 Dec 15, 2022
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022
Sequence modeling benchmarks and temporal convolutional networks
Sequence Modeling Benchmarks and Temporal Convolutional Networks (TCN) This repository contains the experiments done in the work An Empirical Evaluati
 3.5k Jan 3, 2023
3.5k Jan 3, 2023

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022

CVPR2021: Temporal Context Aggregation Network for Temporal Action Proposal Refinement
Temporal Context Aggregation Network - Pytorch This repo holds the pytorch-version codes of paper: "Temporal Context Aggregation Network for Temporal
 63 Sep 27, 2022
63 Sep 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022

ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021)
ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021) Project Page | Video | Paper | Data We present a novel metho
 65 Nov 28, 2022
65 Nov 28, 2022
![[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion](https://github.com/rulixiang/CorrFusionNet/raw/master/figures/corrfusion.png)
[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion
Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion Code for Multi-Temporal Scene Classification and Scene Ch
 33 Dec 12, 2022
33 Dec 12, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022

PyTorch implementation of Densely Connected Time Delay Neural Network
Densely Connected Time Delay Neural Network PyTorch implementation of Densely Connected Time Delay Neural Network (D-TDNN) in our paper "Densely Conne
 64 Oct 11, 2022
64 Oct 11, 2022
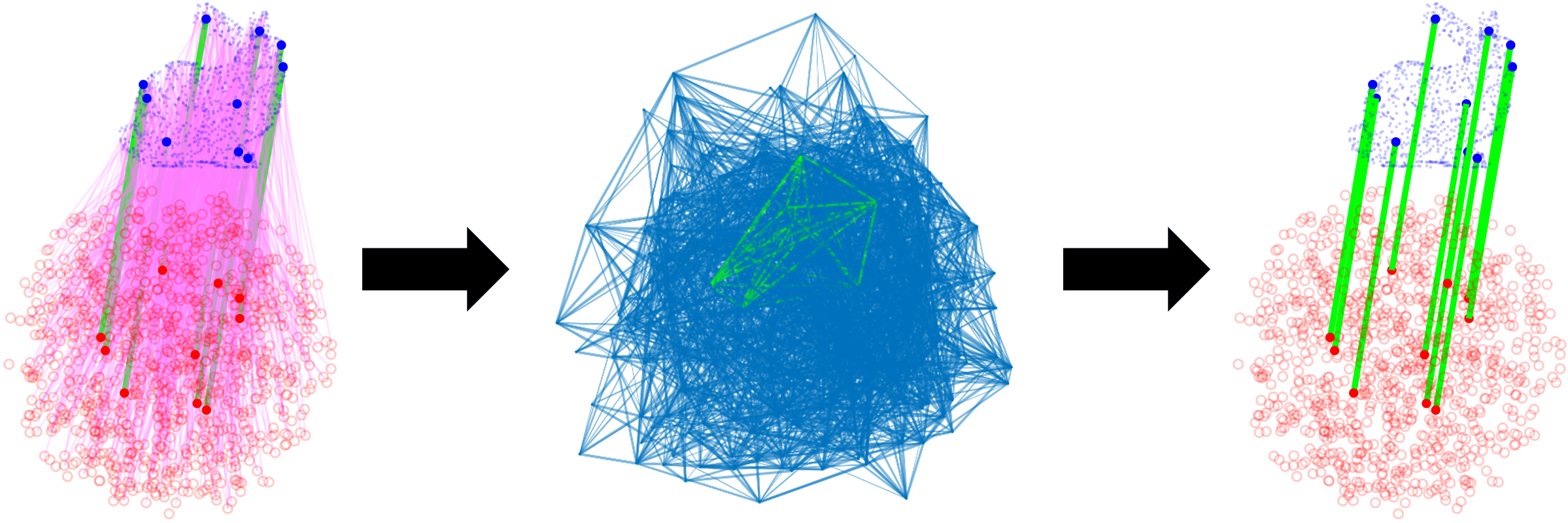
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
90 Dec 29, 2022

Official Pytorch Implementation of Adversarial Instance Augmentation for Building Change Detection in Remote Sensing Images.
IAug_CDNet Official Implementation of Adversarial Instance Augmentation for Building Change Detection in Remote Sensing Images. Overview We propose a
 53 Dec 2, 2022
53 Dec 2, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

Multi-Task Temporal Shift Attention Networks for On-Device Contactless Vitals Measurement (NeurIPS 2020)
MTTS-CAN: Multi-Task Temporal Shift Attention Networks for On-Device Contactless Vitals Measurement Paper Xin Liu, Josh Fromm, Shwetak Patel, Daniel M
 106 Dec 30, 2022
106 Dec 30, 2022

This repo is a PyTorch implementation for Paper "Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds"
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds This repository is a PyTorch implementation for paper: Uns
 42 Dec 9, 2022
42 Dec 9, 2022
LibTraffic is a unified, flexible and comprehensive traffic prediction library based on PyTorch
LibTraffic is a unified, flexible and comprehensive traffic prediction library, which provides researchers with a credibly experimental tool and a convenient development framework. Our library is implemented based on PyTorch, and includes all the necessary steps or components related to traffic prediction into a systematic pipeline.
 432 Jan 5, 2023
432 Jan 5, 2023
Temporal network visualization
Temporal network visualization This code is what I used to make the visualizations of SocioPatterns' primary school data here It requires the data of
 12 Jun 4, 2022
12 Jun 4, 2022
A python script that enables a raspberry pi sd card through the CLI and automates the process of configuring network details and ssh.
This project is one script (wpa_helper.py) written in python that will allow for the user to automate the proccess of setting up a new boot disk and configuring ssh and network settings for the pi
 6 Jun 24, 2021
6 Jun 24, 2021

Grapheme-to-phoneme (G2P) conversion is the process of generating pronunciation for words based on their written form.
Neural G2P to portuguese language Grapheme-to-phoneme (G2P) conversion is the process of generating pronunciation for words based on their written for
 11 Nov 16, 2022
11 Nov 16, 2022

Code for "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" @ICRA2021
CloudAAE This is an tensorflow implementation of "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" Files log:
 35 Nov 14, 2022
35 Nov 14, 2022

Code for the RA-L (ICRA) 2021 paper "SeqNet: Learning Descriptors for Sequence-Based Hierarchical Place Recognition"
SeqNet: Learning Descriptors for Sequence-Based Hierarchical Place Recognition [ArXiv+Supplementary] [IEEE Xplore RA-L 2021] [ICRA 2021 YouTube Video]
 63 Dec 12, 2022
63 Dec 12, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022

The project is an official implementation of our paper "3D Human Pose Estimation with Spatial and Temporal Transformers".
3D Human Pose Estimation with Spatial and Temporal Transformers This repo is the official implementation for 3D Human Pose Estimation with Spatial and
 363 Dec 28, 2022
363 Dec 28, 2022
The implementation of CVPR2021 paper Temporal Query Networks for Fine-grained Video Understanding, by Chuhan Zhang, Ankush Gupta and Andrew Zisserman.
Temporal Query Networks for Fine-grained Video Understanding 📋 This repository contains the implementation of CVPR2021 paper Temporal_Query_Networks
 55 Dec 21, 2022
55 Dec 21, 2022
Incident Response Process and Playbooks | Goal: Playbooks to be Mapped to MITRE Attack Techniques
PURPOSE OF PROJECT That this project will be created by the SOC/Incident Response Community Develop a Catalog of Incident Response Playbook for every
 987 Jan 2, 2023
987 Jan 2, 2023
A new GCN model for Point Cloud Analyse
Pytorch Implementation of PointNet and PointNet++ This repo is implementation for VA-GCN in pytorch. Classification (ModelNet10/40) Data Preparation D
 12 Feb 2, 2022
12 Feb 2, 2022

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 4, 2023
115 Jan 4, 2023
A Python package for floating-point binary fractions. Do math in base 2!
An implementation of a floating-point binary fractions class and module in Python. Work with binary fractions and binary floats with ease!
 10 Oct 29, 2022
10 Oct 29, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A pre-attack hacker tool which aims to find out sensitives comments in HTML comment tag and to help on reconnaissance process
Find Out in Comment Find sensetive comment out in HTML ⚈ About This is a pre-attack hacker tool that searches for sensitives words in HTML comments ta
 8 Dec 31, 2022
8 Dec 31, 2022

Implementation of the "Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos" paper.
Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos Introduction Point cloud videos exhibit irregularities and lack of or
 101 Dec 29, 2022
101 Dec 29, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022
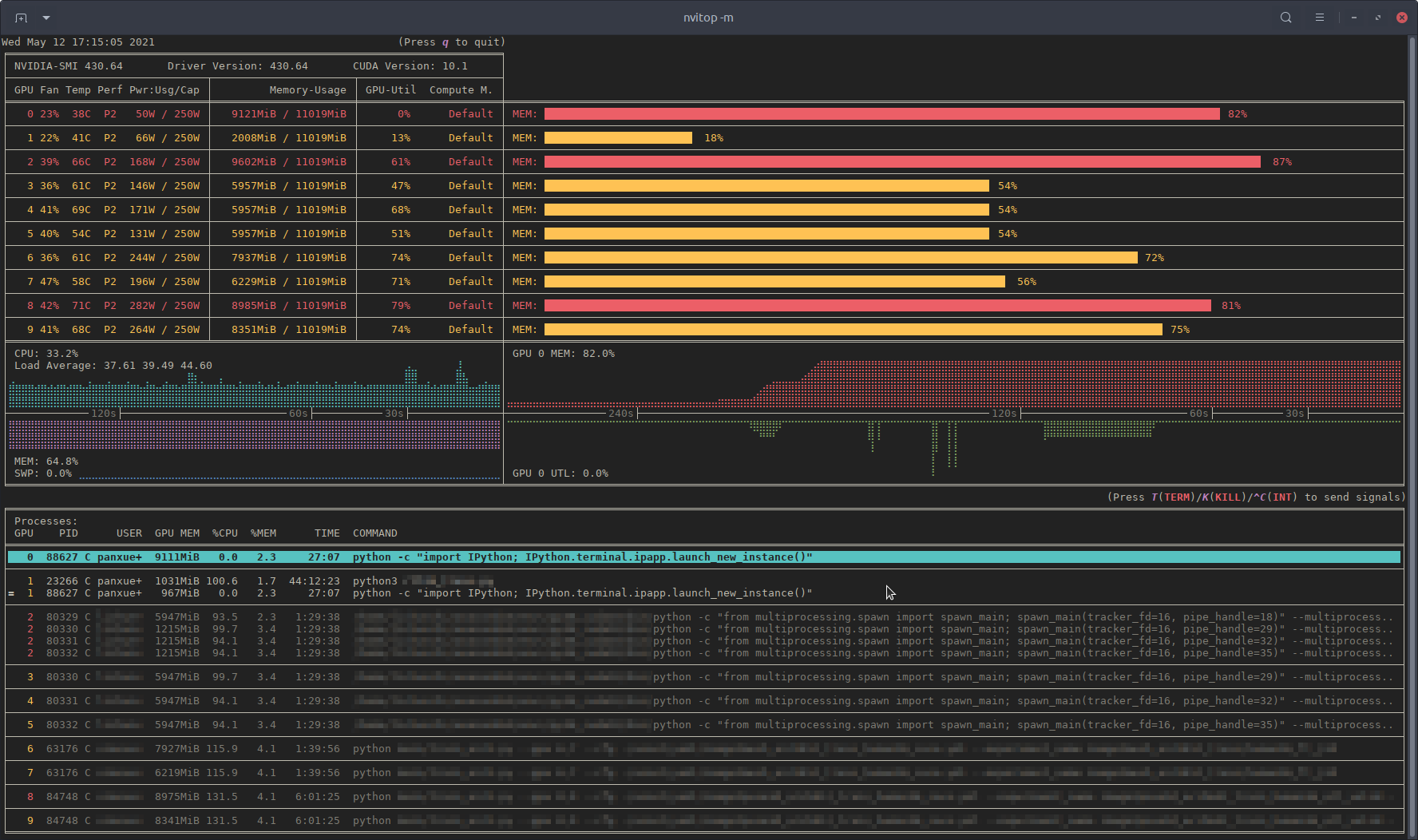
nvitop, an interactive NVIDIA-GPU process viewer, the one-stop solution for GPU process management
An interactive NVIDIA-GPU process viewer, the one-stop solution for GPU process management.
 1.3k Jan 2, 2023
1.3k Jan 2, 2023
A site devoted to celebrating to matching books with readers and readers with books. Inspired by the Readers' Advisory process in library science, Literati, and Stitch Fix.
Welcome to Readers' Advisory Greetings, fellow book enthusiasts! Visit Readers' Advisory! Menu Technologies Key Features Database Schema Front End Rou
 6 Dec 12, 2021
6 Dec 12, 2021
A simple in-process python scheduler library, designed to be integrated seamlessly with the `datetime` standard library.
scheduler A simple in-process python scheduler library, designed to be integrated seamlessly with the datetime standard library. Due to the support of
 30 Dec 30, 2022
30 Dec 30, 2022

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023

3D AffordanceNet is a 3D point cloud benchmark consisting of 23k shapes from 23 semantic object categories, annotated with 56k affordance annotations and covering 18 visual affordance categories.
3D AffordanceNet This repository is the official experiment implementation of 3D AffordanceNet benchmark. 3D AffordanceNet is a 3D point cloud benchma
 49 Dec 1, 2022
49 Dec 1, 2022

Self-Learned Video Rain Streak Removal: When Cyclic Consistency Meets Temporal Correspondence
In this paper, we address the problem of rain streaks removal in video by developing a self-learned rain streak removal method, which does not require any clean groundtruth images in the training process.
 44 Dec 6, 2022
44 Dec 6, 2022
NExT-QA: Next Phase of Question-Answering to Explaining Temporal Actions (CVPR2021)
NExT-QA We reproduce some SOTA VideoQA methods to provide benchmark results for our NExT-QA dataset accepted to CVPR2021 (with 1 'Strong Accept' and 2
 50 Nov 24, 2022
50 Nov 24, 2022

Registration Loss Learning for Deep Probabilistic Point Set Registration
RLLReg This repository contains a Pytorch implementation of the point set registration method RLLReg. Details about the method can be found in the 3DV
 35 Nov 2, 2022
35 Nov 2, 2022
Github project for Attention-guided Temporal Coherent Video Object Matting.
Attention-guided Temporal Coherent Video Object Matting This is the Github project for our paper Attention-guided Temporal Coherent Video Object Matti
 71 Dec 19, 2022
71 Dec 19, 2022

Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving
SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving Abstract In this paper, we introduce SalsaNext f
 308 Jan 4, 2023
308 Jan 4, 2023
Multi-Output Gaussian Process Toolkit
Multi-Output Gaussian Process Toolkit Paper - API Documentation - Tutorials & Examples The Multi-Output Gaussian Process Toolkit is a Python toolkit f
 113 Nov 25, 2022
113 Nov 25, 2022
Code for Transformer Hawkes Process, ICML 2020.
Transformer Hawkes Process Source code for Transformer Hawkes Process (ICML 2020). Run the code Dependencies Python 3.7. Anaconda contains all the req
 111 Dec 26, 2022
111 Dec 26, 2022
source code the paper Fast and Robust Iterative Closet Point.
Fast-Robust-ICP This repository includes the source code the paper Fast and Robust Iterative Closet Point. Authors: Juyong Zhang, Yuxin Yao, Bailin De
 320 Dec 28, 2022
320 Dec 28, 2022
Accompanying code for our paper "Point Cloud Audio Processing"
Point Cloud Audio Processing Krishna Subramani1, Paris Smaragdis1 1UIUC Paper For the necessary libraries/prerequisites, please use conda/anaconda to
 17 Nov 17, 2022
17 Nov 17, 2022
A repo to automate the booking process for vaccinations
OntarioVaccineFormAutomaker A repo to automate the booking process for vaccinations Requirements Allow ALL sights to be able to know your location (on
 7 May 31, 2021
7 May 31, 2021

A minimal Streamlit app showing how to launch and stop a FastAPI process on demand
Simple Streamlit + FastAPI Integration A minimal Streamlit app showing how to launch and stop a FastAPI process on demand. The FastAPI /run route simu
 18 Jan 2, 2023
18 Jan 2, 2023

Code for CVPR2021 paper "Learning Salient Boundary Feature for Anchor-free Temporal Action Localization"
AFSD: Learning Salient Boundary Feature for Anchor-free Temporal Action Localization This is an official implementation in PyTorch of AFSD. Our paper
 146 Dec 24, 2022
146 Dec 24, 2022
Making the process of downloading youtube videos faster and more convinient.
Easy-YT Making the process of downloading youtube videos faster and more convinient. What can it do? This python script can be used to download youtub
 39 Nov 15, 2021
39 Nov 15, 2021

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022

Official implement of Paper:A deeply supervised image fusion network for change detection in high resolution bi-temporal remote sening images
A deeply supervised image fusion network for change detection in high resolution bi-temporal remote sensing images 深度监督影像融合网络DSIFN用于高分辨率双时相遥感影像变化检测 Of
 135 Dec 19, 2022
135 Dec 19, 2022
Deep Compression for Dense Point Cloud Maps.
DEPOCO This repository implements the algorithms described in our paper Deep Compression for Dense Point Cloud Maps. How to get started (using Docker)
67 Dec 6, 2022
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
 17 May 16, 2021
17 May 16, 2021
Text to speech is a process to convert any text into voice. Text to speech project takes words on digital devices and convert them into audio. Here I have used Google-text-to-speech library popularly known as gTTS library to convert text file to .mp3 file. Hope you like my project!
Text to speech (using Python) Text to speech is a process to convert any text into voice. Text to speech project takes words on digital devices and co
 19 Jun 30, 2022
19 Jun 30, 2022
Code for CVPR2021 paper "Learning Salient Boundary Feature for Anchor-free Temporal Action Localization"
AFSD: Learning Salient Boundary Feature for Anchor-free Temporal Action Localization This is an official implementation in PyTorch of AFSD. Our paper
146 Dec 24, 2022
![[NeurIPS 2020] Blind Video Temporal Consistency via Deep Video Prior](https://github.com/yzxing87/pytorch-deep-video-prior/raw/main/example/example_in.gif)
[NeurIPS 2020] Blind Video Temporal Consistency via Deep Video Prior
pytorch-deep-video-prior (DVP) Official PyTorch implementation for NeurIPS 2020 paper: Blind Video Temporal Consistency via Deep Video Prior TensorFlo
 90 Oct 19, 2022
90 Oct 19, 2022

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Implementation of "Fast and Flexible Temporal Point Processes with Triangular Maps" (Oral @ NeurIPS 2020)
Fast and Flexible Temporal Point Processes with Triangular Maps This repository includes a reference implementation of the algorithms described in "Fa
 20 Dec 2, 2022
20 Dec 2, 2022

Official Pytorch implementation of "Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video", CVPR 2021
TCMR: Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video Qualtitative result Paper teaser video Introduction This r
 215 Jan 6, 2023
215 Jan 6, 2023
The official pytorch implemention of the CVPR paper "Temporal Modulation Network for Controllable Space-Time Video Super-Resolution".
This is the official PyTorch implementation of TMNet in the CVPR 2021 paper "Temporal Modulation Network for Controllable Space-Time VideoSuper-Resolu
 95 Oct 24, 2022
95 Oct 24, 2022

Rendering Point Clouds with Compute Shaders
Compute Shader Based Point Cloud Rendering This repository contains the source code to our techreport: Rendering Point Clouds with Compute Shaders and
 460 Jan 5, 2023
460 Jan 5, 2023
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
121 Dec 12, 2022
![[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation](https://github.com/Na-Z/attMPTI/raw/main/framework.jpg)
[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation
Few-shot 3D Point Cloud Semantic Segmentation Created by Na Zhao from National University of Singapore Introduction This repository contains the PyTor
 117 Dec 27, 2022
117 Dec 27, 2022

Self-Supervised Learning for Domain Adaptation on Point-Clouds
Self-Supervised Learning for Domain Adaptation on Point-Clouds Introduction Self-supervised learning (SSL) allows to learn useful representations from
 66 Dec 20, 2022
66 Dec 20, 2022

(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
 86 Oct 5, 2022
86 Oct 5, 2022
(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
86 Oct 5, 2022
LiuAlgoTrader is a scalable, multi-process ML-ready framework for effective algorithmic trading
LiuAlgoTrader is a scalable, multi-process ML-ready framework for effective algorithmic trading. The framework simplify development, testing, deployment, analysis and training algo trading strategies. The framework automatically analyzes trading sessions, and the analysis may be used to train predictive models.
 458 Dec 24, 2022
458 Dec 24, 2022