![]()
Class Activation Map methods implemented in Pytorch
pip install grad-cam
| Method | What it does |
|---|---|
| GradCAM | Weight the 2D activations by the average gradient |
| GradCAM++ | Like GradCAM but uses second order gradients |
| XGradCAM | Like GradCAM but scale the gradients by the normalized activations |
| AblationCAM | Zero out activations and measure how the output drops (this repository includes a fast batched implementation) |
| ScoreCAM | Perbutate the image by the scaled activations and measure how the output drops |
| EigenCAM | Takes the first principle component of the 2D Activations (no class discrimination, but seems to give great results) |
| EigenGradCAM | Like EigenCAM but with class discrimination: First principle component of Activations*Grad. Looks like GradCAM, but cleaner |
| LayerCAM | Spatially weight the activations by positive gradients. Works better especially in lower layers |
| FullGrad | Computes the gradients of the biases from all over the network, and then sums them |
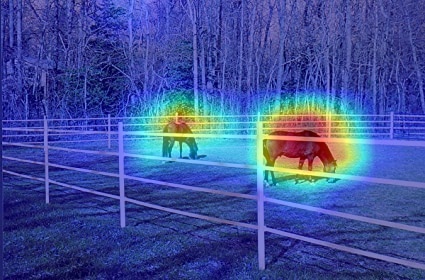
What makes the network think the image label is 'pug, pug-dog' and 'tabby, tabby cat':


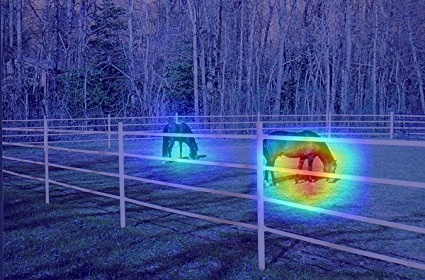
Combining Grad-CAM with Guided Backpropagation for the 'pug, pug-dog' class:

More Visual Examples
Resnet50:
| Category | Image | GradCAM | AblationCAM | ScoreCAM |
|---|---|---|---|---|
| Dog |  |
 |
 |
|
| Cat |  |
 |
 |
Vision Transfomer (Deit Tiny):
| Category | Image | GradCAM | AblationCAM | ScoreCAM |
|---|---|---|---|---|
| Dog |  |
 |
 |
|
| Cat |  |
 |
 |
Swin Transfomer (Tiny window:7 patch:4 input-size:224):
| Category | Image | GradCAM | AblationCAM | ScoreCAM |
|---|---|---|---|---|
| Dog |  |
 |
 |
|
| Cat |  |
 |
 |
It seems that GradCAM++ is almost the same as GradCAM, in most networks except VGG where the advantage is larger.
| Network | Image | GradCAM | GradCAM++ | Score-CAM | Ablation-CAM | Eigen-CAM |
|---|---|---|---|---|---|---|
| VGG16 |  |
 |
 |
 |
 |
 |
| Resnet50 | |
 |
 |
 |
 |
 |
Chosing the Target Layer
You need to choose the target layer to compute CAM for. Some common choices are:
- Resnet18 and 50: model.layer4[-1]
- VGG and densenet161: model.features[-1]
- mnasnet1_0: model.layers[-1]
- ViT: model.blocks[-1].norm1
- SwinT: model.layers[-1].blocks[-1].norm1
Using from code as a library
from pytorch_grad_cam import GradCAM, ScoreCAM, GradCAMPlusPlus, AblationCAM, XGradCAM, EigenCAM
from pytorch_grad_cam.utils.image import show_cam_on_image
from torchvision.models import resnet50
model = resnet50(pretrained=True)
target_layers = [model.layer4[-1]]
input_tensor = # Create an input tensor image for your model..
# Note: input_tensor can be a batch tensor with several images!
# Construct the CAM object once, and then re-use it on many images:
cam = GradCAM(model=model, target_layers=target_layers, use_cuda=args.use_cuda)
# You can also use it within a with statement, to make sure it is freed,
# In case you need to re-create it inside an outer loop:
# with GradCAM(model=model, target_layers=target_layers, use_cuda=args.use_cuda) as cam:
# ...
# If target_category is None, the highest scoring category
# will be used for every image in the batch.
# target_category can also be an integer, or a list of different integers
# for every image in the batch.
target_category = 281
# You can also pass aug_smooth=True and eigen_smooth=True, to apply smoothing.
grayscale_cam = cam(input_tensor=input_tensor, target_category=target_category)
# In this example grayscale_cam has only one image in the batch:
grayscale_cam = grayscale_cam[0, :]
visualization = show_cam_on_image(rgb_img, grayscale_cam)
Smoothing to get nice looking CAMs
To reduce noise in the CAMs, and make it fit better on the objects, two smoothing methods are supported:
-
aug_smooth=TrueTest time augmentation: increases the run time by x6.
Applies a combination of horizontal flips, and mutiplying the image by [1.0, 1.1, 0.9].
This has the effect of better centering the CAM around the objects.
-
eigen_smooth=TrueFirst principle component of
activations*weightsThis has the effect of removing a lot of noise.
| AblationCAM | aug smooth | eigen smooth | aug+eigen smooth |
|---|---|---|---|
 |
 |
 |
 |
Running the example script:
Usage: python cam.py --image-path <path_to_image> --method <method>
To use with CUDA: python cam.py --image-path <path_to_image> --use-cuda
You can choose between:
GradCAM , ScoreCAM, GradCAMPlusPlus, AblationCAM, XGradCAM , LayerCAM and EigenCAM.
Some methods like ScoreCAM and AblationCAM require a large number of forward passes, and have a batched implementation.
You can control the batch size with cam.batch_size =
How does it work with Vision Transformers
See usage_examples/vit_example.py
In ViT the output of the layers are typically BATCH x 197 x 192. In the dimension with 197, the first element represents the class token, and the rest represent the 14x14 patches in the image. We can treat the last 196 elements as a 14x14 spatial image, with 192 channels.
To reshape the activations and gradients to 2D spatial images, we can pass the CAM constructor a reshape_transform function.
This can also be a starting point for other architectures that will come in the future.
GradCAM(model=model, target_layer=target_layer, reshape_transform=reshape_transform)
def reshape_transform(tensor, height=14, width=14):
result = tensor[:, 1 : , :].reshape(tensor.size(0),
height, width, tensor.size(2))
# Bring the channels to the first dimension,
# like in CNNs.
result = result.transpose(2, 3).transpose(1, 2)
return result
Which target_layer should we chose for Vision Transformers?
Since the final classification is done on the class token computed in the last attention block, the output will not be affected by the 14x14 channels in the last layer. The gradient of the output with respect to them, will be 0!
We should chose any layer before the final attention block, for example:
target_layer = model.blocks[-1].norm1
How does it work with Swin Transformers
See usage_examples/swinT_example.py
In Swin transformer base the output of the layers are typically BATCH x 49 x 1024. We can treat the last 49 elements as a 7x7 spatial image, with 1024 channels.
To reshape the activations and gradients to 2D spatial images, we can pass the CAM constructor a reshape_transform function.
This can also be a starting point for other architectures that will come in the future.
GradCAM(model=model, target_layer=target_layer, reshape_transform=reshape_transform)
def reshape_transform(tensor, height=7, width=7):
result = tensor.reshape(tensor.size(0),
height, width, tensor.size(2))
# Bring the channels to the first dimension,
# like in CNNs.
result = result.transpose(2, 3).transpose(1, 2)
return result
Which target_layer should we chose for Swin Transformers?
Since the swin transformer is different from ViT, it does not contains cls_token as present in ViT, therefore we will use all the 7x7 images we get from the last block of the last layer.
We should chose any layer before the final attention block, for example:
target_layer = model.layers[-1].blocks[-1].norm1
Citation
If you use this for research, please cite. Here is an example BibTeX entry:
@misc{jacobgilpytorchcam,
title={PyTorch library for CAM methods},
author={Jacob Gildenblat and contributors},
year={2021},
publisher={GitHub},
howpublished={\url{https://github.com/jacobgil/pytorch-grad-cam}},
}
References
https://arxiv.org/abs/1610.02391
Grad-CAM: Visual Explanations from Deep Networks via Gradient-based Localization Ramprasaath R. Selvaraju, Michael Cogswell, Abhishek Das, Ramakrishna Vedantam, Devi Parikh, Dhruv Batra
https://arxiv.org/abs/1710.11063
Grad-CAM++: Improved Visual Explanations for Deep Convolutional Networks Aditya Chattopadhyay, Anirban Sarkar, Prantik Howlader, Vineeth N Balasubramanian
https://arxiv.org/abs/1910.01279
Score-CAM: Score-Weighted Visual Explanations for Convolutional Neural Networks Haofan Wang, Zifan Wang, Mengnan Du, Fan Yang, Zijian Zhang, Sirui Ding, Piotr Mardziel, Xia Hu
https://ieeexplore.ieee.org/abstract/document/9093360/
Ablation-cam: Visual explanations for deep convolutional network via gradient-free localization. Saurabh Desai and Harish G Ramaswamy. In WACV, pages 972–980, 2020
https://arxiv.org/abs/2008.02312
Axiom-based Grad-CAM: Towards Accurate Visualization and Explanation of CNNs Ruigang Fu, Qingyong Hu, Xiaohu Dong, Yulan Guo, Yinghui Gao, Biao Li
https://arxiv.org/abs/2008.00299
Eigen-CAM: Class Activation Map using Principal Components Mohammed Bany Muhammad, Mohammed Yeasin
http://mftp.mmcheng.net/Papers/21TIP_LayerCAM.pdf
LayerCAM: Exploring Hierarchical Class Activation Maps for Localization Peng-Tao Jiang; Chang-Bin Zhang; Qibin Hou; Ming-Ming Cheng; Yunchao Wei
https://arxiv.org/abs/1905.00780
Full-Gradient Representation for Neural Network Visualization Suraj Srinivas, Francois Fleuret







 I'm struggling to come up to an explanation but I don't understand it because the perfromance doesn't match the cam.
I would be very gratefull if you have some advice.
I'm struggling to come up to an explanation but I don't understand it because the perfromance doesn't match the cam.
I would be very gratefull if you have some advice.












 1 Nov 6, 2021
1 Nov 6, 2021
 3k Jan 4, 2023
3k Jan 4, 2023
 7.5k Jan 7, 2023
7.5k Jan 7, 2023
 7k Jan 3, 2023
7k Jan 3, 2023
 121 Nov 5, 2022
121 Nov 5, 2022
 692 Dec 29, 2022
692 Dec 29, 2022
 520 Dec 26, 2022
520 Dec 26, 2022
 262 Dec 4, 2022
262 Dec 4, 2022
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
 243 Jan 5, 2023
243 Jan 5, 2023
 1.9k Dec 30, 2022
1.9k Dec 30, 2022
 513 Jan 6, 2023
513 Jan 6, 2023
 3.9k Dec 30, 2022
3.9k Dec 30, 2022
 2.6k Dec 30, 2022
2.6k Dec 30, 2022
 720 Dec 22, 2022
720 Dec 22, 2022
 4.5k Jan 7, 2023
4.5k Jan 7, 2023
 20.9k Dec 28, 2022
20.9k Dec 28, 2022
 1.9k Dec 26, 2022
1.9k Dec 26, 2022