282 Repositories
Python red-light-green-light-robot Libraries
Lenovo Legion 5 Pro 2021 Linux RGB Keyboard Light Controller
Lenovo Legion 5 Pro 2021 Linux RGB Keyboard Light Controller This util allows to drive RGB keyboard light on Lenovo Legion 5 Pro 2021 Laptop Requireme
 36 Dec 16, 2022
36 Dec 16, 2022
This is an example manipulation package of for a robot manipulator based on Drake with ROS2.
This is an example manipulation package of for a robot manipulator based on Drake with ROS2.
 1 Oct 21, 2021
1 Oct 21, 2021
A light REST library for Django.
django-nap Read The Docs: https://django-nap.readthedocs.io/en/latest/ Change log: https://django-nap.readthedocs.io/en/latest/changelog.html An API l
 223 Dec 7, 2022
223 Dec 7, 2022

Unofficial PyTorch implementation of MobileViT based on paper "MobileViT: Light-weight, General-purpose, and Mobile-friendly Vision Transformer".
MobileViT RegNet Unofficial PyTorch implementation of MobileViT based on paper MOBILEVIT: LIGHT-WEIGHT, GENERAL-PURPOSE, AND MOBILE-FRIENDLY VISION TR
 91 Dec 2, 2022
91 Dec 2, 2022
Repo for FUZE project. I will also publish some Linux kernel LPE exploits for various real world kernel vulnerabilities here. the samples are uploaded for education purposes for red and blue teams.
Linux_kernel_exploits Some Linux kernel exploits for various real world kernel vulnerabilities here. More exploits are yet to come. This repo contains
 472 Dec 21, 2022
472 Dec 21, 2022
Fast⚡, simple and light💡weight ASGI micro🔬 web🌏-framework for Python🐍.
NanoASGI Asynchronous Python Web Framework NanoASGI is a fast ⚡ , simple and light 💡 weight ASGI micro 🔬 web 🌏 -framework for Python 🐍 . It is dis
 8 Jun 16, 2022
8 Jun 16, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023

linorobot2 is a ROS2 port of the linorobot package
linorobot2 is a ROS2 port of the linorobot package. If you're planning to build your own custom ROS2 robot (2WD, 4WD, Mecanum Drive) using accessible parts, then this package is for you. This repository contains launch files to easily integrate your DIY robot with Nav2 and a simulation pipeline to run and verify your experiments on a virtual robot in Gazebo.
 195 Dec 29, 2022
195 Dec 29, 2022
Electrolux Pure i9 robot vacuum integration for Home Assistant.
Home Assistant Pure i9 This repository integrates your Electrolux Pure i9 robot vacuum with the smart home platform Home Assistant. The integration co
 15 Dec 22, 2022
15 Dec 22, 2022

This is the official code for the paper "Tracker Meets Night: A Transformer Enhancer for UAV Tracking".
SCT This is the official code for the paper "Tracker Meets Night: A Transformer Enhancer for UAV Tracking" The spatial-channel Transformer (SCT) enhan
 27 Nov 23, 2022
27 Nov 23, 2022

An open source API to validate the EU Covid Certificates / Green Certificates
Open Covid Certificate Validator This an open source API to validate EU Digital COVID Certificates. It receives a COVID certificate and validates it u
 47 May 30, 2022
47 May 30, 2022
Stor is a community-driven green cryptocurrency based on a proof of space and time consensus algorithm.
Stor Blockchain Stor is a community-driven green cryptocurrency based on a proof of space and time consensus algorithm. For more information, see our
 15 May 18, 2022
15 May 18, 2022

PyTorch Implementation of "Light Field Image Super-Resolution with Transformers"
LFT PyTorch implementation of "Light Field Image Super-Resolution with Transformers", arXiv 2021. [pdf]. Contributions: We make the first attempt to a
 62 Nov 28, 2022
62 Nov 28, 2022
Use Fofa、shodan、zoomeye、360quake to collect information(e.g:domain,IP,CMS,OS)同时调用Fofa、shodan、zoomeye、360quake四个网络空间测绘API完成红队信息收集
Cyberspace Map API English/中文 Development fofaAPI Completed zoomeyeAPI shodanAPI regular 360 quakeAPI Completed Difficulty APIs uses different inputs
 61 Oct 8, 2022
61 Oct 8, 2022

skimpy is a light weight tool that provides summary statistics about variables in data frames within the console.
skimpy Welcome Welcome to skimpy! skimpy is a light weight tool that provides summary statistics about variables in data frames within the console. Th
 267 Dec 29, 2022
267 Dec 29, 2022

Materi workshop "Light up your Python!" Himpunan Mahasiswa Sistem Informasi Fakultas Ilmu Komputer Universitas Singaperbangsa Karawang, 4 September 2021 (Online via Zoom).
Workshop Python UNSIKA 2021 Materi workshop "Light up your Python!" Himpunan Mahasiswa Sistem Informasi Fakultas Ilmu Komputer Universitas Singaperban
 20 Mar 24, 2022
20 Mar 24, 2022
EMNLP 2021 - Frustratingly Simple Pretraining Alternatives to Masked Language Modeling
Frustratingly Simple Pretraining Alternatives to Masked Language Modeling This is the official implementation for "Frustratingly Simple Pretraining Al
 31 Nov 18, 2022
31 Nov 18, 2022

A Red Team tool for exfiltrating sensitive data from Jira tickets.
Jir-thief This Module will connect to Jira's API using an access token, export to a word .doc, and download the Jira issues that the target has access
 82 Dec 12, 2022
82 Dec 12, 2022

LLVIP: A Visible-infrared Paired Dataset for Low-light Vision
LLVIP: A Visible-infrared Paired Dataset for Low-light Vision Project | Arxiv | Abstract It is very challenging for various visual tasks such as image
 377 Jan 7, 2023
377 Jan 7, 2023
A Simple, Easy to use and light-weight Pyrogram Userbot
Nexa Userbot A Simple, Easy to use and light-weight Pyrogram Userbot Deploy With Heroku With VPS (Local) Clone Nexa-Userbot repository git clone https
 28 Nov 12, 2022
28 Nov 12, 2022
Py_extract is a simple, light-weight python library to handle some extraction tasks using less lines of code
py_extract Py_extract is a simple, light-weight python library to handle some extraction tasks using less lines of code. Still in Development Stage! I
7 Nov 7, 2021

Seeing Dynamic Scene in the Dark: High-Quality Video Dataset with Mechatronic Alignment (ICCV2021)
Seeing Dynamic Scene in the Dark: High-Quality Video Dataset with Mechatronic Alignment This is a pytorch project for the paper Seeing Dynamic Scene i
 21 Nov 28, 2022
21 Nov 28, 2022

Official code of "R2RNet: Low-light Image Enhancement via Real-low to Real-normal Network."
R2RNet Official code of "R2RNet: Low-light Image Enhancement via Real-low to Real-normal Network." Jiang Hai, Zhu Xuan, Ren Yang, Yutong Hao, Fengzhu
 77 Dec 24, 2022
77 Dec 24, 2022

robomimic: A Modular Framework for Robot Learning from Demonstration
robomimic [Homepage] [Documentation] [Study Paper] [Study Website] [ARISE Initiative] Latest Updates [08/09/2021] v0.1.0: Initial code and pap
 178 Jan 5, 2023
178 Jan 5, 2023

DeLighT: Very Deep and Light-Weight Transformers
DeLighT: Very Deep and Light-weight Transformers This repository contains the source code of our work on building efficient sequence models: DeFINE (I
 440 Dec 18, 2022
440 Dec 18, 2022
AV Evasion, a Red Team Tool - Fiber, APC, PNG and UUID
AV Evasion, a Red Team Tool - Fiber, APC, PNG and UUID
 9 Mar 7, 2022
9 Mar 7, 2022

A light-weight image labelling tool for Python designed for creating segmentation data sets.
An image labelling tool for creating segmentation data sets, for Django and Flask.
 117 Nov 21, 2022
117 Nov 21, 2022

IoT owl is light face detection and recognition system made for small IoT devices like raspberry pi.
IoT Owl IoT owl is light face detection and recognition system made for small IoT devices like raspberry pi. Versions Heavy with mask detection withou
 6 Jun 6, 2022
6 Jun 6, 2022

CondenseNet: Light weighted CNN for mobile devices
CondenseNets This repository contains the code (in PyTorch) for "CondenseNet: An Efficient DenseNet using Learned Group Convolutions" paper by Gao Hua
 690 Nov 30, 2022
690 Nov 30, 2022

Set of utilities for exporting/controlling your robot in Blender
Blender Robotics Utils This repository contains utilities for exporting/controlling your robot in Blender Maintainers This repository is maintained by
 33 Nov 30, 2022
33 Nov 30, 2022
This package creates clean and beautiful matplotlib plots that work on light and dark backgrounds
This package creates clean and beautiful matplotlib plots that work on light and dark backgrounds. Inspired by the work of Edward Tufte.
 205 Jan 7, 2023
205 Jan 7, 2023
![[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design](https://github.com/eanswer/DiffHand/raw/master/demos/representative_image.jpg)
[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design
DiffHand This repository contains the implementation for the paper An End-to-End Differentiable Framework for Contact-Aware Robot Design (RSS 2021). I
 60 Jan 4, 2023
60 Jan 4, 2023

GreenDoge is a modern community-centric green cryptocurrency based on a proof-of-space-and-time consensus algorithm.
GreenDoge Blockchain Download GreenDoge blockchain GreenDoge is a modern community-centric green cryptocurrency based on a proof-of-space-and-time con
 40 Sep 11, 2022
40 Sep 11, 2022

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
 49 Nov 28, 2022
49 Nov 28, 2022
BloodCheck enables Red and Blue Teams to manage multiple Neo4j databases and run Cypher queries against a BloodHound dataset.
BloodCheck BloodCheck enables Red and Blue Teams to manage multiple Neo4j databases and run Cypher queries against a BloodHound dataset. Installation
 16 Nov 5, 2021
16 Nov 5, 2021
Bifrost C2. Open-source post-exploitation using Discord API
Bifrost Command and Control What's Bifrost? Bifrost is an open-source Discord BOT that works as Command and Control (C2). This C2 uses Discord API for
 38 Dec 5, 2022
38 Dec 5, 2022

Official project website for the CVPR 2021 paper "Exploring intermediate representation for monocular vehicle pose estimation"
EgoNet Official project website for the CVPR 2021 paper "Exploring intermediate representation for monocular vehicle pose estimation". This repo inclu
 138 Dec 9, 2022
138 Dec 9, 2022

Adversarial Robustness Toolbox (ART) - Python Library for Machine Learning Security - Evasion, Poisoning, Extraction, Inference - Red and Blue Teams
Adversarial Robustness Toolbox (ART) is a Python library for Machine Learning Security. ART provides tools that enable developers and researchers to defend and evaluate Machine Learning models and applications against the adversarial threats of Evasion, Poisoning, Extraction, and Inference. ART supports all popular machine learning frameworks (TensorFlow, Keras, PyTorch, MXNet, scikit-learn, XGBoost, LightGBM, CatBoost, GPy, etc.), all data types (images, tables, audio, video, etc.) and machine learning tasks (classification, object detection, speech recognition, generation, certification, etc.).
 3.4k Jan 4, 2023
3.4k Jan 4, 2023
This repository contains all the code and files needed to simulate the notspot quadrupedal robot using Gazebo and ROS.
Notspot robot simulation - Python version This repository contains all the files and code needed to simulate the notspot quadrupedal robot using Gazeb
 50 Sep 26, 2022
50 Sep 26, 2022

CVPR '21: In the light of feature distributions: Moment matching for Neural Style Transfer
In the light of feature distributions: Moment matching for Neural Style Transfer (CVPR 2021) This repository provides code to recreate results present
 49 Oct 13, 2022
49 Oct 13, 2022
Light weight Scripts and Apps for checking availability of Covid Vaccines in India. Notifies when vaccine becomes avialable in your area.
vaccine-checker Light weight Scripts and Apps for checking availability of Covid Vaccines in India. Notifies when vaccine becomes avialable in your ar
 8 Jun 16, 2021
8 Jun 16, 2021
A highly efficient, fast, powerful and light-weight anime downloader and streamer for your favorite anime.
AnimDL - Download & Stream Your Favorite Anime AnimDL is an incredibly powerful tool for downloading and streaming anime. Core features Abuses the dev
 759 Jan 8, 2023
759 Jan 8, 2023

Tensorflow implementation of MIRNet for Low-light image enhancement
MIRNet Tensorflow implementation of the MIRNet architecture as proposed by Learning Enriched Features for Real Image Restoration and Enhancement. Lanu
 91 Jan 6, 2023
91 Jan 6, 2023

Pytorch implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Detection"
M-LSD: Towards Light-weight and Real-time Line Segment Detection Pytorch implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Det
 123 Jan 4, 2023
123 Jan 4, 2023

Official Tensorflow implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Detection"
M-LSD: Towards Light-weight and Real-time Line Segment Detection Official Tensorflow implementation of "M-LSD: Towards Light-weight and Real-time Line
 357 Jan 4, 2023
357 Jan 4, 2023

Attention-driven Robot Manipulation (ARM) which includes Q-attention
Attention-driven Robotic Manipulation (ARM) This codebase is home to: Q-attention: Enabling Efficient Learning for Vision-based Robotic Manipulation I
 84 Dec 29, 2022
84 Dec 29, 2022
Automation for grabbing keys from a Linux host. Useful during red team exercises to quickly help assess what access to a Linux host can lead to.
keygrabber Automation for grabbing keys from a Linux host. This can be helpful during red team exercises when you gain access to a Linux host and want
 14 Sep 27, 2022
14 Sep 27, 2022

DIRL: Domain-Invariant Representation Learning
DIRL: Domain-Invariant Representation Learning Domain-Invariant Representation Learning (DIRL) is a novel algorithm that semantically aligns both the
 30 Nov 7, 2022
30 Nov 7, 2022
Notspot robot simulation - Python version
Notspot robot simulation - Python version This repository contains all the files and code needed to simulate the notspot quadrupedal robot using Gazeb
50 Sep 26, 2022

Getting the most out of your hobby servo
ServoProject by Adam Bäckström Getting the most out of your hobby servo Theory The control system of a regular hobby servo looks something like this:
 209 Dec 20, 2022
209 Dec 20, 2022
Red Team tool for exfiltrating files from a target's Google Drive that you have access to, via Google's API.
GD-Thief Red Team tool for exfiltrating files from a target's Google Drive that you(the attacker) has access to, via the Google Drive API. This includ
39 Dec 27, 2022
A custom-designed Spider Robot trained to walk using Deep RL in a PyBullet Simulation
SpiderBot_DeepRL Title: Implementation of Single and Multi-Agent Deep Reinforcement Learning Algorithms for a Walking Spider Robot Authors(s): Arijit
 9 Jul 28, 2022
9 Jul 28, 2022
Python sample codes for robotics algorithms.
PythonRobotics Python codes for robotics algorithm. Table of Contents What is this? Requirements Documentation How to use Localization Extended Kalman
 17.2k Jan 1, 2023
17.2k Jan 1, 2023

FastFace: Lightweight Face Detection Framework
Light Face Detection using PyTorch Lightning
 75 Dec 5, 2022
75 Dec 5, 2022
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments.
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments. ABR Control provides API's for the Mujoco, CoppeliaSim (formerly known as VREP), and Pygame simulation environments, and arm configuration files for one, two, and three-joint models, as well as the UR5 and Kinova Jaco 2 arms. Users can also easily extend the package to run with custom arm configurations. ABR Control auto-generates efficient C code for generating the control signals, or uses Mujoco's internal functions to carry out the calculations.
 277 Jan 5, 2023
277 Jan 5, 2023

Code for "Single-view robot pose and joint angle estimation via render & compare", CVPR 2021 (Oral).
Single-view robot pose and joint angle estimation via render & compare Yann Labbé, Justin Carpentier, Mathieu Aubry, Josef Sivic CVPR: Conference on C
 51 Oct 14, 2022
51 Oct 14, 2022

Official implementation of "Accelerating Reinforcement Learning with Learned Skill Priors", Pertsch et al., CoRL 2020
Accelerating Reinforcement Learning with Learned Skill Priors [Project Website] [Paper] Karl Pertsch1, Youngwoon Lee1, Joseph Lim1 1CLVR Lab, Universi
134 Dec 6, 2022
Simple, light-weight config handling through python data classes with to/from JSON serialization/deserialization.
Simple but maybe too simple config management through python data classes. We use it for machine learning.
 67 Nov 29, 2022
67 Nov 29, 2022

Change between dark/light mode depending on the ambient light intensity
svart Change between dark/light mode depending on the ambient light intensity Installation Install using pip $ python3 -m pip install --user svart Ins
 169 Nov 26, 2022
169 Nov 26, 2022

From Fidelity to Perceptual Quality: A Semi-Supervised Approach for Low-Light Image Enhancement (CVPR'2020)
Under-exposure introduces a series of visual degradation, i.e. decreased visibility, intensive noise, and biased color, etc. To address these problems, we propose a novel semi-supervised learning approach for low-light image enhancement.
 117 Jan 3, 2023
117 Jan 3, 2023

Code for HLA-Face: Joint High-Low Adaptation for Low Light Face Detection (CVPR21)
HLA-Face: Joint High-Low Adaptation for Low Light Face Detection The official PyTorch implementation for HLA-Face: Joint High-Low Adaptation for Low L
 77 Dec 8, 2022
77 Dec 8, 2022
Official PyTorch implementation of Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yu
 63 Jan 3, 2023
63 Jan 3, 2023

A light-weight, versatile XYZ tile server, built with Flask and Rasterio :earth_africa:
Terracotta is a pure Python tile server that runs as a WSGI app on a dedicated webserver or as a serverless app on AWS Lambda. It is built on a modern
 531 Dec 28, 2022
531 Dec 28, 2022

Lightspin AWS IAM Vulnerability Scanner
Red-Shadow Lightspin AWS IAM Vulnerability Scanner Description Scan your AWS IAM Configuration for shadow admins in AWS IAM based on misconfigured den
 90 Dec 14, 2022
90 Dec 14, 2022
Light, simple RPC framework for Python
Agileutil是一个Python3 RPC框架。基于微服务架构,封装了rpc/http/orm/log等常用组件,提供了简洁的API,开发者可以很快上手,快速进行业务开发。
 16 Nov 22, 2022
16 Nov 22, 2022
Rembg Video Virtual Green Screen Edition
Rembg Virtual Greenscreen Edition is a tool to create a green screen matte for videos
 61 Mar 28, 2021
61 Mar 28, 2021
![[ICML 2020] Prediction-Guided Multi-Objective Reinforcement Learning for Continuous Robot Control](https://github.com/mit-gfx/PGMORL/raw/master/images/teaser.gif)
[ICML 2020] Prediction-Guided Multi-Objective Reinforcement Learning for Continuous Robot Control
PG-MORL This repository contains the implementation for the paper Prediction-Guided Multi-Objective Reinforcement Learning for Continuous Robot Contro
 65 Jan 7, 2023
65 Jan 7, 2023
gunicorn 'Green Unicorn' is a WSGI HTTP Server for UNIX, fast clients and sleepy applications.
Gunicorn Gunicorn 'Green Unicorn' is a Python WSGI HTTP Server for UNIX. It's a pre-fork worker model ported from Ruby's Unicorn project. The Gunicorn
 8.7k Jan 8, 2023
8.7k Jan 8, 2023
BlackMamba is a multi client C2/post exploitation framework
BlackMamba is a multi client C2/post exploitation framework with some spyware features. Powered by Python 3.8.6 and QT Framework.
 873 Dec 29, 2022
873 Dec 29, 2022
🦕 NanoSaur is a little tracked robot ROS2 enabled, made for an NVIDIA Jetson Nano
🦕 nanosaur NanoSaur is a little tracked robot ROS2 enabled, made for an NVIDIA Jetson Nano Website: nanosaur.ai Do you need an help? Discord For tech
 162 Dec 9, 2022
162 Dec 9, 2022
Web testing library for Robot Framework
SeleniumLibrary Contents Introduction Keyword Documentation Installation Browser drivers Usage Extending SeleniumLibrary Community Versions History In
 1.2k Jan 3, 2023
1.2k Jan 3, 2023
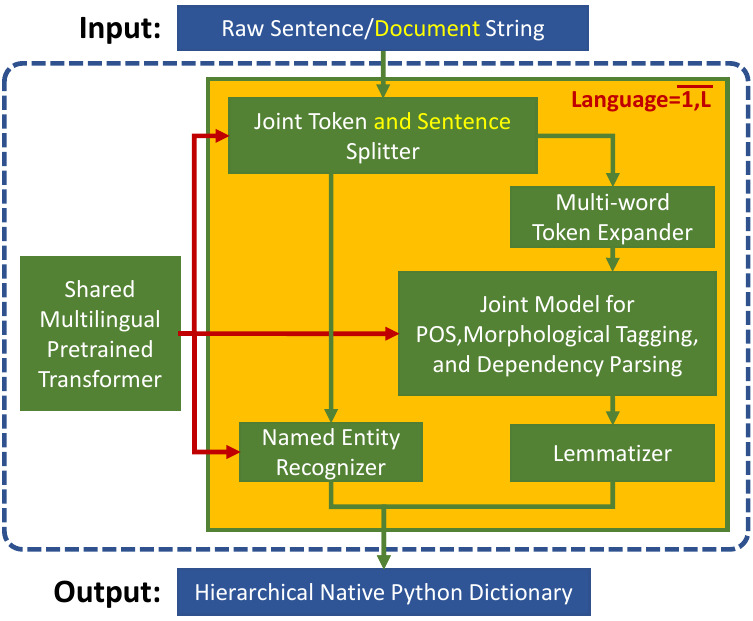
Trankit is a Light-Weight Transformer-based Python Toolkit for Multilingual Natural Language Processing
Trankit: A Light-Weight Transformer-based Python Toolkit for Multilingual Natural Language Processing Trankit is a light-weight Transformer-based Pyth
 652 Jan 6, 2023
652 Jan 6, 2023
gunicorn 'Green Unicorn' is a WSGI HTTP Server for UNIX, fast clients and sleepy applications.
Gunicorn Gunicorn 'Green Unicorn' is a Python WSGI HTTP Server for UNIX. It's a pre-fork worker model ported from Ruby's Unicorn project. The Gunicorn
8.7k Jan 1, 2023

Universal Xiaomi MIoT integration for Home Assistant
Xiaomi MIoT Raw 简体中文 | English MIoT 协议是小米智能家居从 2018 年起推行的智能设备通信协议规范,此后凡是可接入米家的设备均通过此协议进行通信。此插件按照 MIoT 协议规范与设备通信,实现对设备的状态读取及控制。
 1.9k Jan 2, 2023
1.9k Jan 2, 2023
PaddleRobotics is an open-source algorithm library for robots based on Paddle, including open-source parts such as human-robot interaction, complex motion control, environment perception, SLAM positioning, and navigation.
简体中文 | English PaddleRobotics paddleRobotics是基于paddle的机器人开源算法库集,包括人机交互、复杂运动控制、环境感知、slam定位导航等开源算法部分。 人机交互 主动多模交互技术TFVT-HRI 主动多模交互技术是通过视觉、语音、触摸传感器等输入机器人
 185 Dec 26, 2022
185 Dec 26, 2022
A light weight Python library for the Spotify Web API
Spotipy A light weight Python library for the Spotify Web API Documentation Spotipy's full documentation is online at Spotipy Documentation. Installat
 4.2k Jan 6, 2023
4.2k Jan 6, 2023
light wrapper for indeed.com api
Simple wrapper for indeed api. go to indeed.com - register for api publisher token example from indeed import IndeedApi token = 'your token' api =
 16 Sep 21, 2022
16 Sep 21, 2022
A light wrapper around FedEx's SOAP API.
Python FedEx SOAP API Module Author: Greg Taylor, Radek Wojcik Maintainer: Python FedEx Developers License: BSD Status: Stable What is it? A light wra
 155 Dec 16, 2022
155 Dec 16, 2022

Green is a clean, colorful, fast python test runner.
Green -- A clean, colorful, fast python test runner. Features Clean - Low redundancy in output. Result statistics for each test is vertically aligned.
 756 Dec 22, 2022
756 Dec 22, 2022
Green is a clean, colorful, fast python test runner.
Green -- A clean, colorful, fast python test runner. Features Clean - Low redundancy in output. Result statistics for each test is vertically aligned.
756 Dec 22, 2022
A light-weight, modular, message representation and mail delivery framework for Python.
Marrow Mailer A highly efficient and modular mail delivery framework for Python 2.6+ and 3.2+, formerly called TurboMail. © 2006-2019, Alice Bevan-McG
 255 Dec 28, 2022
255 Dec 28, 2022