esc_test
This is a Python package used to plot and analyze data collected for the purpose of characterizing a particular propeller, motor, and ESC configuration (e.g. for quadrotors).
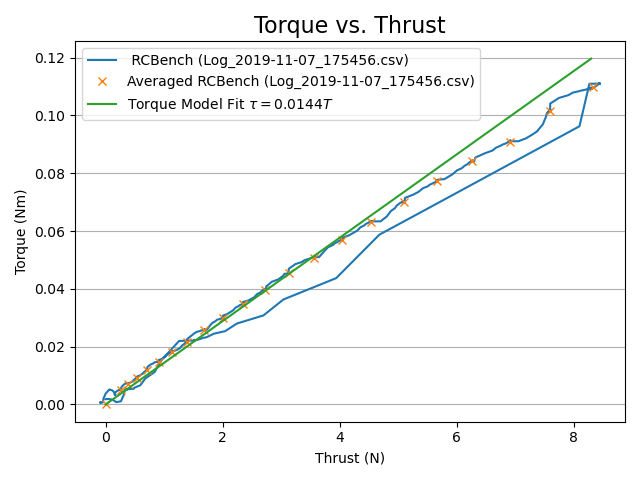
main.py computes two models:
- a quadratic model describing thrust as a function of motor RPM
- a linear model describing torque as a function of thrust
The data sources currently supported are:
- RCBenchmark logs
- AutoQuad logs, from the ESC32 Configuration Utility
Additional sources can be used by adding an appropriate class to formats.py.
Sample data from 6 tests is included, all with the three-bladed 7-inch DALPROP T7056.
- ESC32v3 with T-Motor F40 Pro III 1600 kv (esc32v3-f40)
- Kotleta 20 with F60 Pro II 1750 kv (duty cycle commands, kotleta-f60-duty)
- Kotleta 20 with F60 Pro II 1750 kv (closed-loop RPM commands, kotleta-f60-rpm)
- ESC32v3 with F60 Pro II 1750 kv (esc32v3-f60)
- ESC32v2 with F60 Pro II 1750 kv (esc32v2-f60)
- Aikon BLHeli32 4-in-1 with F80 Pro 1900 kv (aikon-f80)
You can add your own data by editing tests_sample.py or creating Test objects and adding them to tests.py.
The relationship between RPM and thrust should really only be a function of the propeller and it should be independent of the ESC and motor. So for all six tests above, the RPM to thrust curves should be fairly similar. However, the command and voltage to RPM (and thus to thrust) relationship will depend on the ESC and motor as well.
Written with the help of Xuning Yang.
Usage
Dependencies are numpy, scipy, and matplotlib.
Run python main.py
where TEST is a test name found in tests_sample.py.
Run python main.py --help to see additional options. In particular, --plot-debug can be used to plot additional intermediate quantities used in the model computation and --plot-extra will plot additional measurements that may be interesting.
plot_rpm_thrust.py is a helper script to compare motor thrust models from different tests.
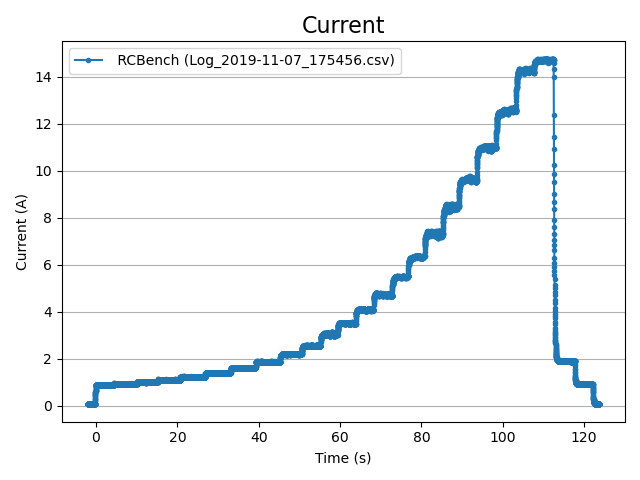
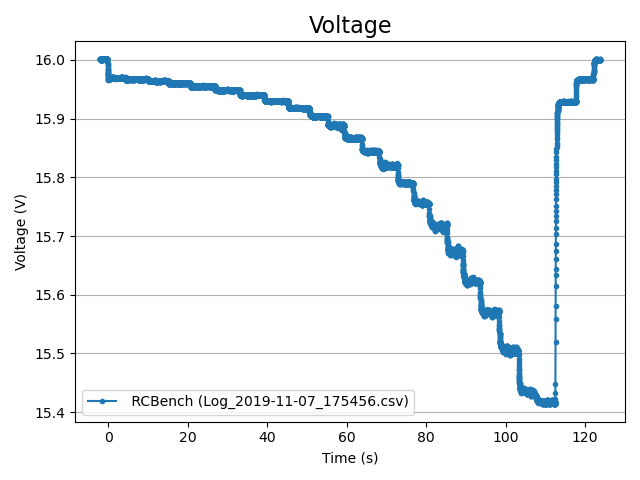
Sample Output
Plots can be optionally saved to the media folder by passing --save to main.py.


 3.4k Dec 29, 2022
3.4k Dec 29, 2022
 31 Mar 6, 2021
31 Mar 6, 2021

 2.3k Dec 31, 2022
2.3k Dec 31, 2022
 990 Jan 5, 2023
990 Jan 5, 2023

 30 Feb 22, 2022
30 Feb 22, 2022
 16.7k Jan 8, 2023
16.7k Jan 8, 2023
 13.1k Jan 3, 2023
13.1k Jan 3, 2023

 611 Dec 29, 2022
611 Dec 29, 2022

 692 Feb 18, 2021
692 Feb 18, 2021
 2 Dec 24, 2021
2 Dec 24, 2021
 2 Jun 15, 2022
2 Jun 15, 2022
 697 Jan 6, 2023
697 Jan 6, 2023
 822 Jan 7, 2023
822 Jan 7, 2023
 1.3k Dec 13, 2022
1.3k Dec 13, 2022
 2 Oct 22, 2021
2 Oct 22, 2021
 134 Jan 2, 2023
134 Jan 2, 2023