263 Repositories
Python point-of-sale Libraries
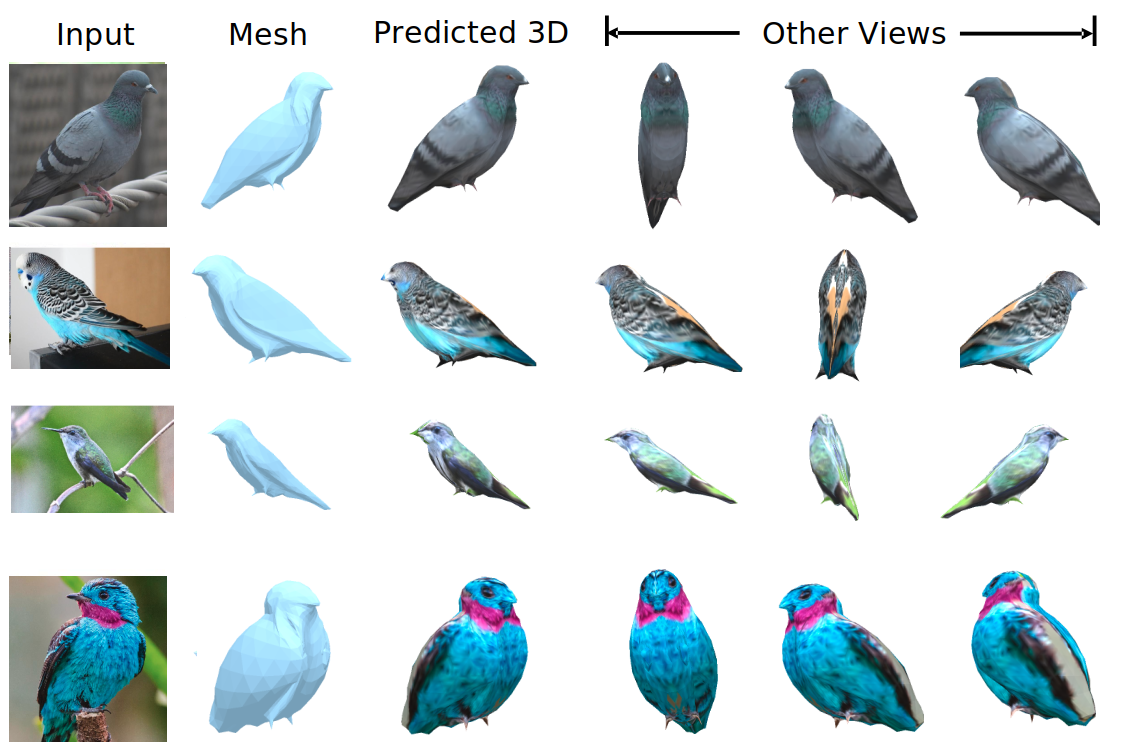
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
 27 Dec 15, 2022
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022
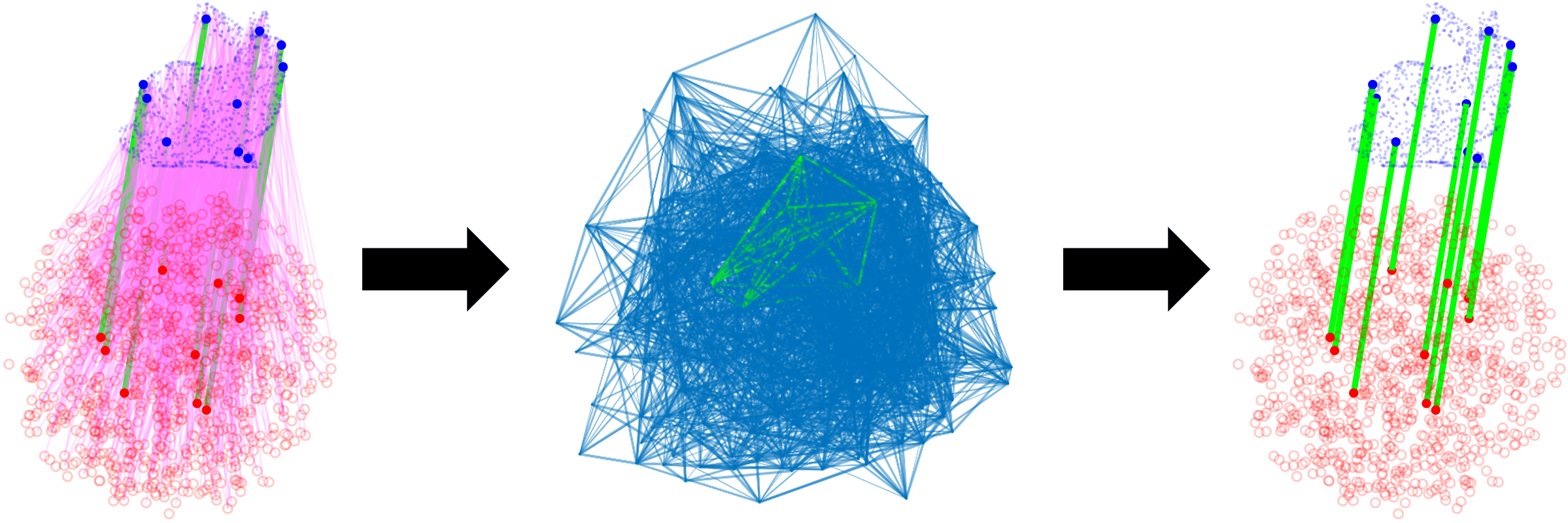
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
90 Dec 29, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

This repo is a PyTorch implementation for Paper "Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds"
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds This repository is a PyTorch implementation for paper: Uns
 42 Dec 9, 2022
42 Dec 9, 2022

Code for "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" @ICRA2021
CloudAAE This is an tensorflow implementation of "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" Files log:
 35 Nov 14, 2022
35 Nov 14, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
A new GCN model for Point Cloud Analyse
Pytorch Implementation of PointNet and PointNet++ This repo is implementation for VA-GCN in pytorch. Classification (ModelNet10/40) Data Preparation D
 12 Feb 2, 2022
12 Feb 2, 2022

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 4, 2023
115 Jan 4, 2023
A Python package for floating-point binary fractions. Do math in base 2!
An implementation of a floating-point binary fractions class and module in Python. Work with binary fractions and binary floats with ease!
 10 Oct 29, 2022
10 Oct 29, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

Implementation of the "Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos" paper.
Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos Introduction Point cloud videos exhibit irregularities and lack of or
 101 Dec 29, 2022
101 Dec 29, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023

3D AffordanceNet is a 3D point cloud benchmark consisting of 23k shapes from 23 semantic object categories, annotated with 56k affordance annotations and covering 18 visual affordance categories.
3D AffordanceNet This repository is the official experiment implementation of 3D AffordanceNet benchmark. 3D AffordanceNet is a 3D point cloud benchma
 49 Dec 1, 2022
49 Dec 1, 2022

Registration Loss Learning for Deep Probabilistic Point Set Registration
RLLReg This repository contains a Pytorch implementation of the point set registration method RLLReg. Details about the method can be found in the 3DV
 35 Nov 2, 2022
35 Nov 2, 2022

Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving
SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving Abstract In this paper, we introduce SalsaNext f
 308 Jan 4, 2023
308 Jan 4, 2023
source code the paper Fast and Robust Iterative Closet Point.
Fast-Robust-ICP This repository includes the source code the paper Fast and Robust Iterative Closet Point. Authors: Juyong Zhang, Yuxin Yao, Bailin De
 320 Dec 28, 2022
320 Dec 28, 2022
Accompanying code for our paper "Point Cloud Audio Processing"
Point Cloud Audio Processing Krishna Subramani1, Paris Smaragdis1 1UIUC Paper For the necessary libraries/prerequisites, please use conda/anaconda to
 17 Nov 17, 2022
17 Nov 17, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022
Deep Compression for Dense Point Cloud Maps.
DEPOCO This repository implements the algorithms described in our paper Deep Compression for Dense Point Cloud Maps. How to get started (using Docker)
67 Dec 6, 2022
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
 17 May 16, 2021
17 May 16, 2021

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Implementation of "Fast and Flexible Temporal Point Processes with Triangular Maps" (Oral @ NeurIPS 2020)
Fast and Flexible Temporal Point Processes with Triangular Maps This repository includes a reference implementation of the algorithms described in "Fa
 20 Dec 2, 2022
20 Dec 2, 2022

Rendering Point Clouds with Compute Shaders
Compute Shader Based Point Cloud Rendering This repository contains the source code to our techreport: Rendering Point Clouds with Compute Shaders and
 460 Jan 5, 2023
460 Jan 5, 2023
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
121 Dec 12, 2022
![[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation](https://github.com/Na-Z/attMPTI/raw/main/framework.jpg)
[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation
Few-shot 3D Point Cloud Semantic Segmentation Created by Na Zhao from National University of Singapore Introduction This repository contains the PyTor
 117 Dec 27, 2022
117 Dec 27, 2022

Self-Supervised Learning for Domain Adaptation on Point-Clouds
Self-Supervised Learning for Domain Adaptation on Point-Clouds Introduction Self-supervised learning (SSL) allows to learn useful representations from
 66 Dec 20, 2022
66 Dec 20, 2022

(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
 86 Oct 5, 2022
86 Oct 5, 2022
(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
86 Oct 5, 2022

Official PyTorch implementation of CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds Introduction This is the official PyTorch implementation of o
 96 Dec 7, 2022
96 Dec 7, 2022
MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch, towards the next-generation platform for general 3D detection. It is a part of the OpenMMLab project developed by MMLab.
 3.2k Jan 5, 2023
3.2k Jan 5, 2023

Implementation of CVPR'21: RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction
RfD-Net [Project Page] [Paper] [Video] RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction Yinyu Nie, Ji Hou, Xiaoguang Han, Matthi
 162 Jan 6, 2023
162 Jan 6, 2023

Implementation of the "PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences" paper.
PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences Introduction Point cloud sequences are irregular and unordered in the spatial dimen
63 Dec 9, 2022
![[PyTorch] Official implementation of CVPR2021 paper](https://github.com/XuyangBai/PointDSC/raw/master/figures/pipeline.png)
[PyTorch] Official implementation of CVPR2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency". https://arxiv.org/abs/2103.05465
PointDSC repository PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency",
 153 Dec 14, 2022
153 Dec 14, 2022

《A-CNN: Annularly Convolutional Neural Networks on Point Clouds》(2019)
A-CNN: Annularly Convolutional Neural Networks on Point Clouds Created by Artem Komarichev, Zichun Zhong, Jing Hua from Department of Computer Science
 44 Feb 24, 2022
44 Feb 24, 2022

(CVPR 2021) PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds by Mutian Xu*, Runyu Ding*, Hengshuang Zhao, and Xiaojuan Qi. Int
 228 Dec 25, 2022
228 Dec 25, 2022

Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021)
Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021) An efficient PyTorch library for Point Cloud Completion.
 119 Jan 2, 2023
119 Jan 2, 2023

Official implementation of YOGO for Point-Cloud Processing
You Only Group Once: Efficient Point-Cloud Processing with Token Representation and Relation Inference Module By Chenfeng Xu, Bohan Zhai, Bichen Wu, T
 67 Dec 20, 2022
67 Dec 20, 2022
This project is the official implementation of our accepted ICLR 2021 paper BiPointNet: Binary Neural Network for Point Clouds.
BiPointNet: Binary Neural Network for Point Clouds Created by Haotong Qin, Zhongang Cai, Mingyuan Zhang, Yifu Ding, Haiyu Zhao, Shuai Yi, Xianglong Li
 59 Dec 17, 2022
59 Dec 17, 2022
Module for statistical learning, with a particular emphasis on time-dependent modelling
Operating system Build Status Linux/Mac Windows tick tick is a Python 3 module for statistical learning, with a particular emphasis on time-dependent
 410 Dec 14, 2022
410 Dec 14, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering This repository holds all the code and data for our recent work on
 118 Dec 6, 2022
118 Dec 6, 2022

A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF or LFI.
BurpParamFlagger A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF
 118 Nov 7, 2022
118 Nov 7, 2022
A general 3D Object Detection codebase in PyTorch.
Det3D is the first 3D Object Detection toolbox which provides off the box implementations of many 3D object detection algorithms such as PointPillars, SECOND, PIXOR, etc, as well as state-of-the-art methods on major benchmarks like KITTI(ViP) and nuScenes(CBGS).
 1.4k Jan 5, 2023
1.4k Jan 5, 2023
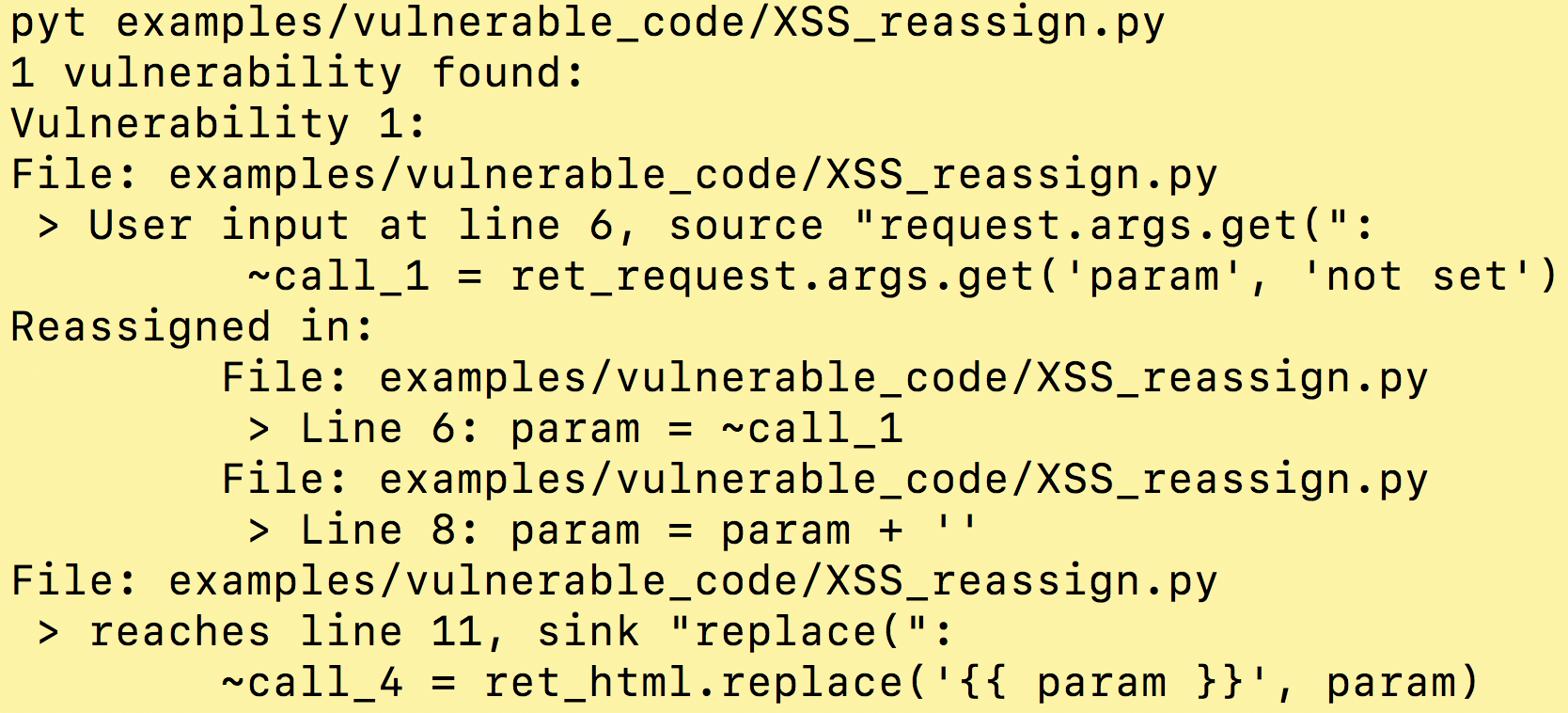
A Static Analysis Tool for Detecting Security Vulnerabilities in Python Web Applications
This project is no longer maintained March 2020 Update: Please go see the amazing Pysa tutorial that should get you up to speed finding security vulne
 2.1k Dec 25, 2022
2.1k Dec 25, 2022

Jittor implementation of PCT:Point Cloud Transformer
PCT: Point Cloud Transformer This is a Jittor implementation of PCT: Point Cloud Transformer.
 547 Jan 3, 2023
547 Jan 3, 2023

Implementation of the Point Transformer layer, in Pytorch
Point Transformer - Pytorch Implementation of the Point Transformer self-attention layer, in Pytorch. The simple circuit above seemed to have allowed
501 Jan 3, 2023
Pytorch Implementation of Various Point Transformers
Pytorch Implementation of Various Point Transformers Recently, various methods applied transformers to point clouds: PCT: Point Cloud Transformer (Men
434 Dec 30, 2022
Pytorch implementation of PCT: Point Cloud Transformer
PCT: Point Cloud Transformer This is a Pytorch implementation of PCT: Point Cloud Transformer.
 265 Dec 22, 2022
265 Dec 22, 2022
aka "Bayesian Methods for Hackers": An introduction to Bayesian methods + probabilistic programming with a computation/understanding-first, mathematics-second point of view. All in pure Python ;)
Bayesian Methods for Hackers Using Python and PyMC The Bayesian method is the natural approach to inference, yet it is hidden from readers behind chap
 25.1k Jan 2, 2023
25.1k Jan 2, 2023