320 Repositories
Python determinantal-point-processes Libraries

Implementation of CVPR'2022:Surface Reconstruction from Point Clouds by Learning Predictive Context Priors
Surface Reconstruction from Point Clouds by Learning Predictive Context Priors (CVPR 2022) Personal Web Pages | Paper | Project Page This repository c
 136 Dec 12, 2022
136 Dec 12, 2022

Implementation of CVPR'2022:Reconstructing Surfaces for Sparse Point Clouds with On-Surface Priors
Reconstructing Surfaces for Sparse Point Clouds with On-Surface Priors (CVPR 2022) Personal Web Pages | Paper | Project Page This repository contains
151 Dec 26, 2022

Stratified Transformer for 3D Point Cloud Segmentation (CVPR 2022)
Stratified Transformer for 3D Point Cloud Segmentation Xin Lai*, Jianhui Liu*, Li Jiang, Liwei Wang, Hengshuang Zhao, Shu Liu, Xiaojuan Qi, Jiaya Jia
 195 Jan 1, 2023
195 Jan 1, 2023
Specification for storing geospatial vector data (point, line, polygon) in Parquet
GeoParquet About This repository defines how to store geospatial vector data (point, lines, polygons) in Apache Parquet, a popular columnar storage fo
 449 Dec 27, 2022
449 Dec 27, 2022

Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral)
Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral) This is the official implementat
 259 Dec 25, 2022
259 Dec 25, 2022

Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR 2022)
Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR2022)[paper] Authors: Chenhang He, Ruihuang Li, Shuai Li, L
 141 Dec 30, 2022
141 Dec 30, 2022

Official source code of Fast Point Transformer, CVPR 2022
Fast Point Transformer Project Page | Paper This repository contains the official source code and data for our paper: Fast Point Transformer Chunghyun
 182 Dec 23, 2022
182 Dec 23, 2022
![[CVPR 2022 Oral] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation](https://github.com/tjiiv-cprg/EPro-PnP/raw/main/intro.png)
[CVPR 2022 Oral] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation
EPro-PnP EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation In CVPR 2022 (Oral). [paper] Hanshen
 842 Jan 4, 2023
842 Jan 4, 2023

(CVPR 2022 Oral) Official implementation for "Surface Representation for Point Clouds"
RepSurf - Surface Representation for Point Clouds [CVPR 2022 Oral] By Haoxi Ran* , Jun Liu, Chengjie Wang ( * : corresponding contact) The pytorch off
 264 Dec 23, 2022
264 Dec 23, 2022

Code for the SIGGRAPH 2022 paper "DeltaConv: Anisotropic Operators for Geometric Deep Learning on Point Clouds."
DeltaConv [Paper] [Project page] Code for the SIGGRAPH 2022 paper "DeltaConv: Anisotropic Operators for Geometric Deep Learning on Point Clouds" by Ru
 98 Nov 26, 2022
98 Nov 26, 2022

Repo for "Benchmarking Robustness of 3D Point Cloud Recognition against Common Corruptions" https://arxiv.org/abs/2201.12296
Benchmarking Robustness of 3D Point Cloud Recognition against Common Corruptions This repo contains the dataset and code for the paper Benchmarking Ro
 168 Dec 29, 2022
168 Dec 29, 2022
Official implementation of "CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding" (CVPR, 2022)
CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding (CVPR'22) Paper Link | Project Page Abstract : Manual an
 152 Dec 23, 2022
152 Dec 23, 2022

Point Density-Aware Voxels for LiDAR 3D Object Detection (CVPR 2022)
PDV PDV is LiDAR 3D object detection method. This repository is based off [OpenPCDet]. Point Density-Aware Voxels for LiDAR 3D Object Detection Jordan
 114 Dec 21, 2022
114 Dec 21, 2022
![[ICLR 2022 Oral] F8Net: Fixed-Point 8-bit Only Multiplication for Network Quantization](https://user-images.githubusercontent.com/25779973/164990377-bb692b26-4c7c-41bb-be8c-d91bdc6e8715.png)
[ICLR 2022 Oral] F8Net: Fixed-Point 8-bit Only Multiplication for Network Quantization
F8Net Fixed-Point 8-bit Only Multiplication for Network Quantization (ICLR 2022 Oral) OpenReview | arXiv | PDF | Model Zoo | BibTex PyTorch implementa
 76 Dec 13, 2022
76 Dec 13, 2022

Group R-CNN for Point-based Weakly Semi-supervised Object Detection (CVPR2022)
Group R-CNN for Point-based Weakly Semi-supervised Object Detection (CVPR2022) By Shilong Zhang*, Zhuoran Yu*, Liyang Liu*, Xinjiang Wang, Aojun Zhou,
 129 Dec 24, 2022
129 Dec 24, 2022

Official Implementation for the "An Empirical Investigation of 3D Anomaly Detection and Segmentation" paper.
An Empirical Investigation of 3D Anomaly Detection and Segmentation Project | Paper Official PyTorch Implementation for the "An Empirical Investigatio
 55 Dec 14, 2022
55 Dec 14, 2022

REGTR: End-to-end Point Cloud Correspondences with Transformers
REGTR: End-to-end Point Cloud Correspondences with Transformers This repository contains the source code for REGTR. REGTR utilizes multiple transforme
 108 Dec 17, 2022
108 Dec 17, 2022

LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection
LiDAR Distillation Paper | Model LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection Yi Wei, Zibu Wei, Yongming Rao, Jiax
 75 Dec 22, 2022
75 Dec 22, 2022

Official page of Struct-MDC (RA-L'22 with IROS'22 option); Depth completion from Visual-SLAM using point & line features
Struct-MDC (click the above buttons for redirection!) Official page of "Struct-MDC: Mesh-Refined Unsupervised Depth Completion Leveraging Structural R
 37 Dec 22, 2022
37 Dec 22, 2022
![[ICCV2021] 3DVG-Transformer: Relation Modeling for Visual Grounding on Point Clouds](https://github.com/zlccccc/3DVG-Transformer/raw/main/demo/Model.png)
[ICCV2021] 3DVG-Transformer: Relation Modeling for Visual Grounding on Point Clouds
3DVG-Transformer This repository is for the ICCV 2021 paper "3DVG-Transformer: Relation Modeling for Visual Grounding on Point Clouds" Our method "3DV
 22 Dec 11, 2022
22 Dec 11, 2022
NPBG++: Accelerating Neural Point-Based Graphics
[CVPR 2022] NPBG++: Accelerating Neural Point-Based Graphics Project Page | Paper This repository contains the official Python implementation of the p
 57 Dec 3, 2022
57 Dec 3, 2022

A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning.
Open3DSOT A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning. The official code release of BAT an
 172 Dec 23, 2022
172 Dec 23, 2022

This repository contains the data and code for the paper "Diverse Text Generation via Variational Encoder-Decoder Models with Gaussian Process Priors" (SPNLP@ACL2022)
GP-VAE This repository provides datasets and code for preprocessing, training and testing models for the paper: Diverse Text Generation via Variationa
 18 Dec 29, 2022
18 Dec 29, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023

Code for CVPR 2022 paper "SoftGroup for Instance Segmentation on 3D Point Clouds"
SoftGroup We provide code for reproducing results of the paper SoftGroup for 3D Instance Segmentation on Point Clouds (CVPR 2022) Author: Thang Vu, Ko
 231 Dec 27, 2022
231 Dec 27, 2022
Return-Parity-MDP - Towards Return Parity in Markov Decision Processes
Towards Return Parity in Markov Decision Processes Code for the AISTATS 2022 pap
 3 Nov 27, 2022
3 Nov 27, 2022
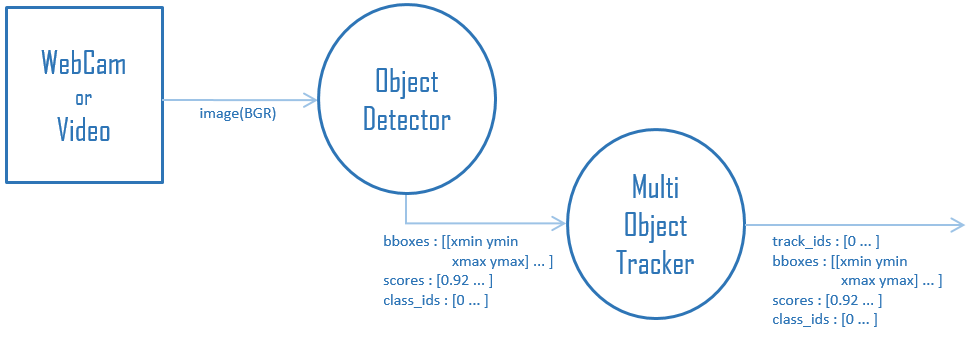
MOT-Tracking-by-Detection-Pipeline - For Tracking-by-Detection format MOT (Multi Object Tracking), is it a framework that separates Detection and Tracking processes?
MOT-Tracking-by-Detection-Pipeline Tracking-by-Detection形式のMOT(Multi Object Trac
 41 Nov 23, 2022
41 Nov 23, 2022

Point-NeRF: Point-based Neural Radiance Fields
Point-NeRF: Point-based Neural Radiance Fields Project Sites | Paper | Primary c
 662 Jan 1, 2023
662 Jan 1, 2023

GeoTransformer - Geometric Transformer for Fast and Robust Point Cloud Registration
Geometric Transformer for Fast and Robust Point Cloud Registration PyTorch imple
 220 Jan 5, 2023
220 Jan 5, 2023
PyTorch-lightning implementation of the ESFW module proposed in our paper Edge-Selective Feature Weaving for Point Cloud Matching
Edge-Selective Feature Weaving for Point Cloud Matching This repository contains a PyTorch-lightning implementation of the ESFW module proposed in our
 5 Feb 14, 2022
5 Feb 14, 2022
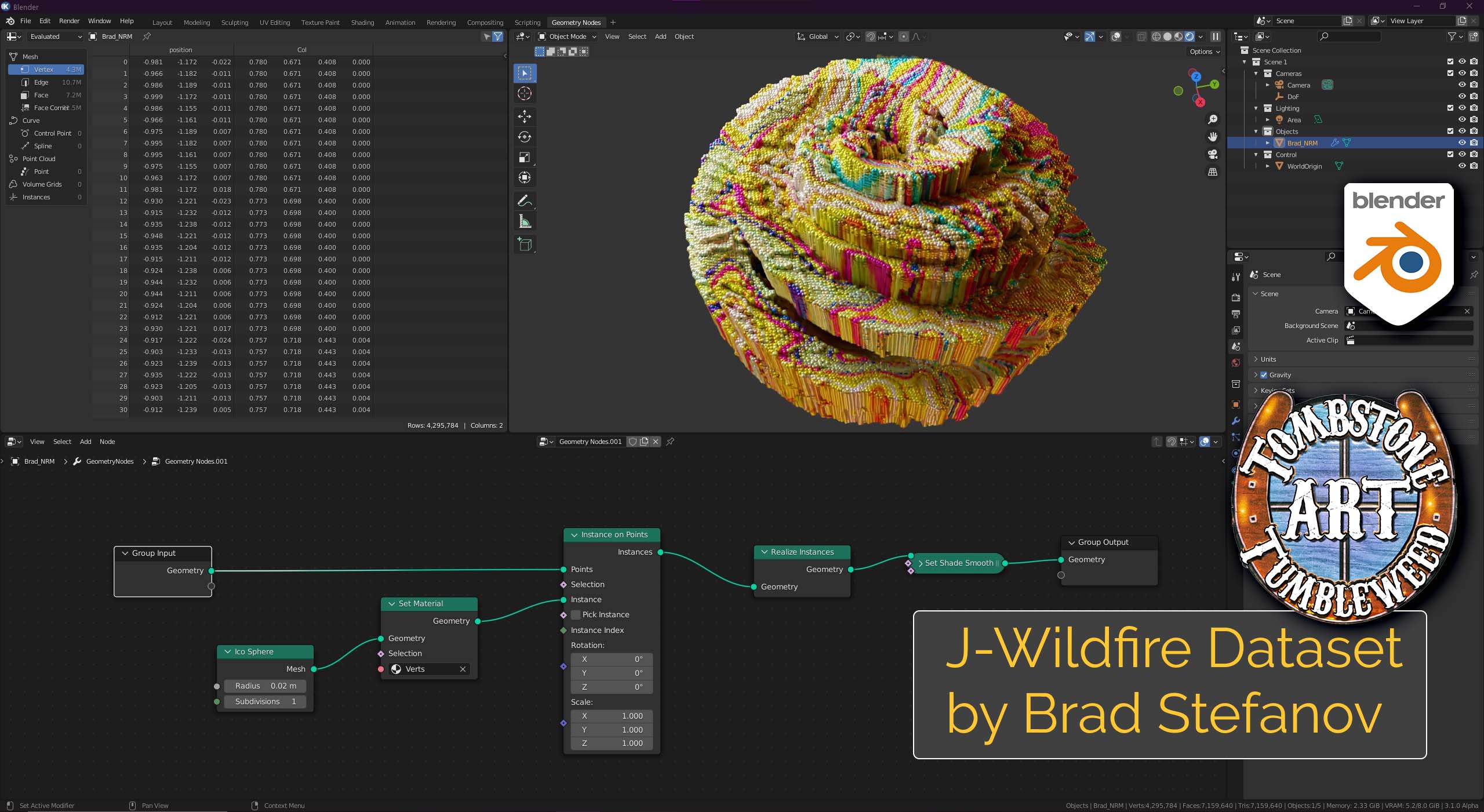
Blender 3.1 Alpha (and later) PLY importer that correctly loads point clouds (and all PLY models as point clouds)
import-ply-as-verts Blender 3.1 Alpha (and later) PLY importer that correctly loads point clouds (and all PLY models as point clouds) Latest News Mand
 82 Dec 20, 2022
82 Dec 20, 2022
A Numba-based two-point correlation function calculator using a grid decomposition
A Numba-based two-point correlation function (2PCF) calculator using a grid decomposition. Like Corrfunc, but written in Numba, with simplicity and hackability in mind.
 3 Aug 24, 2022
3 Aug 24, 2022

KinectFusion implemented in Python with PyTorch
KinectFusion implemented in Python with PyTorch This is a lightweight Python implementation of KinectFusion. All the core functions (TSDF volume, fram
 80 Jan 3, 2023
80 Jan 3, 2023

Deep Surface Reconstruction from Point Clouds with Visibility Information
Data, code and pretrained models for the paper Deep Surface Reconstruction from Point Clouds with Visibility Information.
 23 Jan 4, 2023
23 Jan 4, 2023

Code for the paper "Benchmarking and Analyzing Point Cloud Classification under Corruptions"
ModelNet-C Code for the paper "Benchmarking and Analyzing Point Cloud Classification under Corruptions". For the latest updates, see: sites.google.com
 45 Dec 28, 2022
45 Dec 28, 2022
RipsNet: a general architecture for fast and robust estimation of the persistent homology of point clouds
RipsNet: a general architecture for fast and robust estimation of the persistent homology of point clouds This repository contains the code asscoiated
 14 Dec 12, 2022
14 Dec 12, 2022
This speeds up PyCharm's package index processes and avoids CPU & memory overloading
This speeds up PyCharm's package index processes and avoids CPU & memory overloading
 1 Feb 9, 2022
1 Feb 9, 2022

MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition
MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition Paper: MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition accepted fo
 64 Dec 18, 2022
64 Dec 18, 2022
Cairo-math-64x61 - Fixed point 64.61 math library for Cairo / Starknet
Cairo Math 64x61 A fixed point 64.61 math library for Cairo & Starknet Signed 64
 63 Dec 5, 2022
63 Dec 5, 2022
![[ECE NTUA] 👁 Computer Vision - Lab Projects & Theoretical Problem Sets (2020-2021)](https://github.com/d-dimos/computer_vision_ntua/raw/master/labs/lab1/README_imgs/edge_in.jpg?raw=true)
[ECE NTUA] 👁 Computer Vision - Lab Projects & Theoretical Problem Sets (2020-2021)
Computer Vision - NTUA (2020-2021) This repository hosts the lab projects and theoretical problem sets of the Computer Vision course held by ECE NTUA
 6 Jul 21, 2022
6 Jul 21, 2022

On the adaptation of recurrent neural networks for system identification
On the adaptation of recurrent neural networks for system identification This repository contains the Python code to reproduce the results of the pape
 3 Jan 13, 2022
3 Jan 13, 2022
Western-3DSlicer-Modules - Point-Set Registrations for Ultrasound Probe Calibrations
Point-Set Registrations for Ultrasound Probe Calibrations -Undergraduate Thesis-
 0 May 4, 2022
0 May 4, 2022
Static Features Classifier - A static features classifier for Point-Could clusters using an Attention-RNN model
Static Features Classifier This is a static features classifier for Point-Could
 1 Jan 25, 2022
1 Jan 25, 2022
A Python script that alerts via SMS when a stock is reaching an inflection point
TradeAlert Not sure what this will ultimately become, but for now, its a Python script that alerts via SMS when a stock is reaching an inflection poin
 3 Feb 22, 2022
3 Feb 22, 2022

Full Transformer Framework for Robust Point Cloud Registration with Deep Information Interaction
Full Transformer Framework for Robust Point Cloud Registration with Deep Information Interaction. arxiv This repository contains python scripts for tr
 12 Dec 12, 2022
12 Dec 12, 2022

Applying CLIP to Point Cloud Recognition.
PointCLIP: Point Cloud Understanding by CLIP This repository is an official implementation of the paper 'PointCLIP: Point Cloud Understanding by CLIP'
 175 Dec 24, 2022
175 Dec 24, 2022
Simple mathematical operations on image, point and surface layers.
napari-math This package provides a GUI interfrace for simple mathematical operations on image, point and surface layers. addition subtraction multipl
 2 Jan 18, 2022
2 Jan 18, 2022

BADet: Boundary-Aware 3D Object Detection from Point Clouds (Pattern Recognition 2022)
BADet: Boundary-Aware 3D Object Detection from Point Clouds (Pattern Recognition
 17 Dec 12, 2022
17 Dec 12, 2022
A Python implementation of active inference for Markov Decision Processes
A Python package for simulating Active Inference agents in Markov Decision Process environments. Please see our companion preprint on arxiv for an ove
 235 Dec 21, 2022
235 Dec 21, 2022
Source code for our CVPR 2019 paper - PPGNet: Learning Point-Pair Graph for Line Segment Detection
PPGNet: Learning Point-Pair Graph for Line Segment Detection PyTorch implementation of our CVPR 2019 paper: PPGNet: Learning Point-Pair Graph for Line
 170 Oct 25, 2022
170 Oct 25, 2022
Weakly-supervised semantic image segmentation with CNNs using point supervision
Code for our ECCV paper What's the Point: Semantic Segmentation with Point Supervision. Summary This library is a custom build of Caffe for semantic i
 27 Sep 14, 2022
27 Sep 14, 2022
Use stochastic processes to generate samples and use them to train a fully-connected neural network based on Keras
Use stochastic processes to generate samples and use them to train a fully-connected neural network based on Keras which will then be used to generate residuals
 2 Jan 14, 2022
2 Jan 14, 2022

K Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching (To appear in RA-L 2022)
KCP The official implementation of KCP: k Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching, accepted for p
 109 Dec 14, 2022
109 Dec 14, 2022

Implementation of Shape Generation and Completion Through Point-Voxel Diffusion
Shape Generation and Completion Through Point-Voxel Diffusion Project | Paper Implementation of Shape Generation and Completion Through Point-Voxel Di
 103 Dec 29, 2022
103 Dec 29, 2022
Source code of paper: "HRegNet: A Hierarchical Network for Efficient and Accurate Outdoor LiDAR Point Cloud Registration".
HRegNet: A Hierarchical Network for Efficient and Accurate Outdoor LiDAR Point Cloud Registration Environments The code mainly requires the following
 3 Oct 6, 2022
3 Oct 6, 2022

Designed a greedy algorithm based on Markov sequential decision-making process in MATLAB/Python to optimize using Gurobi solver
Designed a greedy algorithm based on Markov sequential decision-making process in MATLAB/Python to optimize using Gurobi solver, the wheel size, gear shifting sequence by modeling drivetrain constraints to achieve maximum laps in a race with a 2-hour time window.
 1 Jan 11, 2022
1 Jan 11, 2022
🎃 Core identification module of AI powerful point reading system platform.
ppReader-Kernel Intro Core identification module of AI powerful point reading system platform. Usage 硬件: Windows10、GPU:nvdia GTX 1060 、普通RBG相机 软件: con
 1 Jan 11, 2022
1 Jan 11, 2022
POCO: Point Convolution for Surface Reconstruction
POCO: Point Convolution for Surface Reconstruction by: Alexandre Boulch and Renaud Marlet Abstract Implicit neural networks have been successfully use
 93 Dec 29, 2022
93 Dec 29, 2022
Leveraging Social Influence based on Users Activity Centers for Point-of-Interest Recommendation
SUCP Leveraging Social Influence based on Users Activity Centers for Point-of-Interest Recommendation () Direct Friends (i.e., users who follow each o
 8 Nov 26, 2022
8 Nov 26, 2022

A simple flask application to collect annotations for the Turing Change Point Dataset, a benchmark dataset for change point detection algorithms
AnnotateChange Welcome to the repository of the "AnnotateChange" application. This application was created to collect annotations of time series data
 16 Jul 21, 2022
16 Jul 21, 2022

ruptures: change point detection in Python
Welcome to ruptures ruptures is a Python library for off-line change point detection. This package provides methods for the analysis and segmentation
 1.1k Jan 3, 2023
1.1k Jan 3, 2023
The Turing Change Point Detection Benchmark: An Extensive Benchmark Evaluation of Change Point Detection Algorithms on real-world data
Turing Change Point Detection Benchmark Welcome to the repository for the Turing Change Point Detection Benchmark, a benchmark evaluation of change po
85 Dec 28, 2022
A small Python library which gives you the IEEE-754 representation of a floating point number.
ieee754 ieee754 is small Python library which gives you the IEEE-754 representation of a floating point number. You can specify a precision given in t
 5 Dec 20, 2022
5 Dec 20, 2022
A general and strong 3D object detection codebase that supports more methods, datasets and tools (debugging, recording and analysis).
ALLINONE-Det ALLINONE-Det is a general and strong 3D object detection codebase built on OpenPCDet, which supports more methods, datasets and tools (de
 5 Nov 3, 2022
5 Nov 3, 2022
A generator of point clouds dataset for PyPipes.
CloudPipesGenerator Documentation | Colab Notebooks | Video Tutorials | Master Degree website A generator of point clouds dataset for PyPipes. TODO Us
 1 Jan 13, 2022
1 Jan 13, 2022

Vis2Mesh: Efficient Mesh Reconstruction from Unstructured Point Clouds of Large Scenes with Learned Virtual View Visibility ICCV2021
Vis2Mesh This is the offical repository of the paper: Vis2Mesh: Efficient Mesh Reconstruction from Unstructured Point Clouds of Large Scenes with Lear
 71 Dec 25, 2022
71 Dec 25, 2022

Attention-based Transformation from Latent Features to Point Clouds (AAAI 2022)
Attention-based Transformation from Latent Features to Point Clouds This repository contains a PyTorch implementation of the paper: Attention-based Tr
 12 Nov 11, 2022
12 Nov 11, 2022

Real-time LIDAR-based Urban Road and Sidewalk detection for Autonomous Vehicles 🚗
urban_road_filter: a real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles Dependency ROS (tested with Kinetic and
 180 Dec 12, 2022
180 Dec 12, 2022
Code for NeurIPS 2021 paper 'Spatio-Temporal Variational Gaussian Processes'
Spatio-Temporal Variational GPs This repository is the official implementation of the methods in the publication: O. Hamelijnck, W.J. Wilkinson, N.A.
 26 Sep 16, 2022
26 Sep 16, 2022
![[CVPR 2021] Scan2Cap: Context-aware Dense Captioning in RGB-D Scans](https://github.com/daveredrum/Scan2Cap/raw/main/demo/Scan2Cap.gif)
[CVPR 2021] Scan2Cap: Context-aware Dense Captioning in RGB-D Scans
Scan2Cap: Context-aware Dense Captioning in RGB-D Scans Introduction We introduce the task of dense captioning in 3D scans from commodity RGB-D sensor
 79 Nov 7, 2022
79 Nov 7, 2022
Pointer-generator - Code for the ACL 2017 paper Get To The Point: Summarization with Pointer-Generator Networks
Note: this code is no longer actively maintained. However, feel free to use the Issues section to discuss the code with other users. Some users have u
 2.1k Jan 4, 2023
2.1k Jan 4, 2023
UnpNet - Rethinking 3-D LiDAR Point Cloud Segmentation(IEEE TNNLS)
UnpNet Citation Please cite the following paper if you use this repository in your reseach. @article {PMID:34914599, Title = {Rethinking 3-D LiDAR Po
 4 Jul 15, 2022
4 Jul 15, 2022

Distributed Grid Descent: an algorithm for hyperparameter tuning guided by Bayesian inference, designed to run on multiple processes and potentially many machines with no central point of control
Distributed Grid Descent: an algorithm for hyperparameter tuning guided by Bayesian inference, designed to run on multiple processes and potentially many machines with no central point of control.
 1 Jan 1, 2022
1 Jan 1, 2022

TarkovScrappy - A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov!
TarkovScrappy A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov! Hideout items
 2 Apr 11, 2022
2 Apr 11, 2022

PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Created by Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas from Sta
 4k Dec 30, 2022
4k Dec 30, 2022

Used the pyautogui library to automate some processes on the computer
Pyautogui Utilizei a biblioteca pyautogui para automatizar alguns processos no c
 1 Dec 30, 2021
1 Dec 30, 2021

A Python library for common tasks on 3D point clouds
Point Cloud Utils (pcu) - A Python library for common tasks on 3D point clouds Point Cloud Utils (pcu) is a utility library providing the following fu
 622 Dec 27, 2022
622 Dec 27, 2022
Functional interface for concurrent futures, including asynchronous I/O.
Futured provides a consistent interface for concurrent functional programming in Python. It wraps any callable to return a concurrent.futures.Future,
 11 Nov 27, 2022
11 Nov 27, 2022
Python code that gives the fastest path from point a to point b of a chess horse
PERSONAL-PROJECTS CARLOS MAGALLANES-ARANDA'S PERSONAL PROJECTS kchess.py is the code. its input is the start and the end. EXMPLE - a1 d5 its output is
 1 Dec 26, 2021
1 Dec 26, 2021

JumpDiff: Non-parametric estimator for Jump-diffusion processes for Python
jumpdiff jumpdiff is a python library with non-parametric Nadaraya─Watson estimators to extract the parameters of jump-diffusion processes. With jumpd
 28 Dec 10, 2022
28 Dec 10, 2022

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022

PyTorch Implementation of PIXOR: Real-time 3D Object Detection from Point Clouds
PIXOR: Real-time 3D Object Detection from Point Clouds This is a custom implementation of the paper from Uber ATG using PyTorch 1.0. It represents the
 270 Dec 14, 2022
270 Dec 14, 2022
Run python scripts and pass data between multiple python and node processes using this npm module
Run python scripts and pass data between multiple python and node processes using this npm module. process-communication has a event based architecture for interacting with python data and errors inside nodejs.
 2 Aug 6, 2021
2 Aug 6, 2021
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
 72 Dec 24, 2022
72 Dec 24, 2022

Pyeventbus: a publish/subscribe event bus
pyeventbus pyeventbus is a publish/subscribe event bus for Python 2.7. simplifies the communication between python classes decouples event senders and
 15 Apr 21, 2022
15 Apr 21, 2022
Self-Adaptable Point Processes with Nonparametric Time Decays
NPPDecay This is our implementation for the paper Self-Adaptable Point Processes with Nonparametric Time Decays, by Zhimeng Pan, Zheng Wang, Jeff M. P
 2 Sep 24, 2022
2 Sep 24, 2022

High-performance moving least squares material point method (MLS-MPM) solver.
High-Performance MLS-MPM Solver with Cutting and Coupling (CPIC) (MIT License) A Moving Least Squares Material Point Method with Displacement Disconti
 2.2k Dec 31, 2022
2.2k Dec 31, 2022

Help you understand Manual and w/ Clutch point while driving.
简体中文 forza_auto_gear forza_auto_gear is a tool for Forza Horizon 5. It will help us understand the best gear shift point using Manual or w/ Clutch in
 15 Oct 8, 2022
15 Oct 8, 2022
🍰 ConnectMP - An easy and efficient way to share data between Processes in Python.
ConnectMP - Taking Multi-Process Data Sharing to the moon 🚀 Contribute · Community · Documentation 🎫 Introduction : 🍤 ConnectMP is the easiest and
 1 Dec 24, 2021
1 Dec 24, 2021
A desktop application developed in Python with PyQt5 to predict demand and help monitor and schedule brewing processes for Barnaby's Brewhouse.
brewhouse-management A desktop application developed in Python with PyQt5 to predict demand and help monitor and schedule brewing processes for Barnab
 2 Jul 9, 2022
2 Jul 9, 2022

PyTorch implementation of DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration (BMVC 2021)
DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration [video] [paper] [supplementary] [data] [thesis] Introduction De
 10 Dec 14, 2022
10 Dec 14, 2022
This repository contains notebook implementations of the following Neural Process variants: Conditional Neural Processes (CNPs), Neural Processes (NPs), Attentive Neural Processes (ANPs).
The Neural Process Family This repository contains notebook implementations of the following Neural Process variants: Conditional Neural Processes (CN
 892 Dec 28, 2022
892 Dec 28, 2022
A Python package for faster, safer, and simpler ML processes
Bender 🤖 A Python package for faster, safer, and simpler ML processes. Why use bender? Bender will make your machine learning processes, faster, safe
 6 Dec 13, 2022
6 Dec 13, 2022
Scan all java processes on your host to check weather it's affected by log4j2 remote code execution
Log4j2 Vulnerability Local Scanner (CVE-2021-45046) Log4j 漏洞本地检测脚本,扫描主机上所有java进程,检测是否引入了有漏洞的log4j-core jar包,是否可能遭到远程代码执行攻击(CVE-2021-45046)。上传扫描报告到指定的服
 86 Dec 9, 2022
86 Dec 9, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023

Neural Point-Based Graphics
Neural Point-Based Graphics Project Video Paper Neural Point-Based Graphics Kara-Ali Aliev1 Artem Sevastopolsky1,2 Maria Kolos1,2 Dmitry Ulyanov3
 252 Dec 13, 2022
252 Dec 13, 2022

MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity
MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity Introduction The 3D LiDAR place recognition aim
 16 Dec 8, 2022
16 Dec 8, 2022

Get 2D point positions (e.g., facial landmarks) projected on 3D mesh
points2d_projection_mesh Input 2D points (e.g. facial landmarks) on an image Camera parameters (extrinsic and intrinsic) of the image Aligned 3D mesh
 5 Dec 8, 2022
5 Dec 8, 2022
Unsynchronize asyncio by using an ambient event loop, or executing in separate threads or processes.
unsync Unsynchronize asyncio by using an ambient event loop, or executing in separate threads or processes. Quick Overview Functions marked with the @
 802 Dec 28, 2022
802 Dec 28, 2022
Official Implementation of SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations
Official Implementation of SimIPU SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations Since
 37 Dec 1, 2022
37 Dec 1, 2022