532 Repositories
Python Point-BERT Libraries
BERT model training impelmentation using 1024 A100 GPUs for MLPerf Training v1.1
Pre-trained checkpoint and bert config json file Location of checkpoint and bert config json file This MLCommons members Google Drive location contain
 12 Apr 27, 2022
12 Apr 27, 2022

Cascading Feature Extraction for Fast Point Cloud Registration (BMVC 2021)
Cascading Feature Extraction for Fast Point Cloud Registration This repository contains the source code for the paper [Arxive link comming soon]. Meth
 7 May 26, 2022
7 May 26, 2022

This is an official source code for implementation on Extensive Deep Temporal Point Process
Extensive Deep Temporal Point Process This is an official source code for implementation on Extensive Deep Temporal Point Process, which is composed o
 8 Aug 15, 2022
8 Aug 15, 2022
A Word Level Transformer layer based on PyTorch and 🤗 Transformers.
Transformer Embedder A Word Level Transformer layer based on PyTorch and 🤗 Transformers. How to use Install the library from PyPI: pip install transf
 27 Nov 20, 2022
27 Nov 20, 2022
[EMNLP 2021] Mirror-BERT: Converting Pretrained Language Models to universal text encoders without labels.
[EMNLP 2021] Mirror-BERT: Converting Pretrained Language Models to universal text encoders without labels.
 61 Dec 10, 2022
61 Dec 10, 2022

Pytorch implementation of "Get To The Point: Summarization with Pointer-Generator Networks"
About this repository This repo contains an Pytorch implementation for the ACL 2017 paper Get To The Point: Summarization with Pointer-Generator Netwo
 7 Oct 14, 2022
7 Oct 14, 2022

An NLP library with Awesome pre-trained Transformer models and easy-to-use interface, supporting wide-range of NLP tasks from research to industrial applications.
简体中文 | English News [2021-10-12] PaddleNLP 2.1版本已发布!新增开箱即用的NLP任务能力、Prompt Tuning应用示例与生成任务的高性能推理! 🎉 更多详细升级信息请查看Release Note。 [2021-08-22]《千言:面向事实一致性的生
 6.9k Jan 1, 2023
6.9k Jan 1, 2023

Mengzi Pretrained Models
中文 | English Mengzi 尽管预训练语言模型在 NLP 的各个领域里得到了广泛的应用,但是其高昂的时间和算力成本依然是一个亟需解决的问题。这要求我们在一定的算力约束下,研发出各项指标更优的模型。 我们的目标不是追求更大的模型规模,而是轻量级但更强大,同时对部署和工业落地更友好的模型。
 424 Jan 4, 2023
424 Jan 4, 2023

Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
 329 Jan 6, 2023
329 Jan 6, 2023
pytorch bert intent classification and slot filling
pytorch_bert_intent_classification_and_slot_filling 基于pytorch的中文意图识别和槽位填充 说明 基本思路就是:分类+序列标注(命名实体识别)同时训练。 使用的预训练模型:hugging face上的chinese-bert-wwm-ext 依
 33 Dec 15, 2022
33 Dec 15, 2022

Open & Efficient for Framework for Aspect-based Sentiment Analysis
PyABSA - Open & Efficient for Framework for Aspect-based Sentiment Analysis Fast & Low Memory requirement & Enhanced implementation of Local Context F
 567 Jan 7, 2023
567 Jan 7, 2023

DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021)
DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021) This repo is the implementation of DPC. Tested environment Pyth
 30 Nov 30, 2022
30 Nov 30, 2022

Patch-Based Deep Autoencoder for Point Cloud Geometry Compression
Patch-Based Deep Autoencoder for Point Cloud Geometry Compression Overview The ever-increasing 3D application makes the point cloud compression unprec
 17 Dec 5, 2022
17 Dec 5, 2022

Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
 16 Nov 19, 2022
16 Nov 19, 2022

FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation
This repository contains the code accompanying the paper " FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation" Paper link: R
 20 Jun 29, 2022
20 Jun 29, 2022
SciBERT is a BERT model trained on scientific text.
SciBERT is a BERT model trained on scientific text.
 1.2k Dec 24, 2022
1.2k Dec 24, 2022
Converting CPT to bert form for use
cpt-encoder 将CPT转成bert形式使用 说明 刚刚刷到又出了一种模型:CPT,看论文显示,在很多中文任务上性能比mac bert还好,就迫不及待想把它用起来。 根据对源码的研究,发现该模型在做nlu建模时主要用的encoder部分,也就是bert,因此我将这部分权重转为bert权重类型
 1 Oct 14, 2021
1 Oct 14, 2021
Implementation of BI-RADS-BERT & The Advantages of Section Tokenization.
BI-RADS BERT Implementation of BI-RADS-BERT & The Advantages of Section Tokenization. This implementation could be used on other radiology in house co
 1 May 17, 2022
1 May 17, 2022

Tensorflow Repo for "DeepGCNs: Can GCNs Go as Deep as CNNs?"
DeepGCNs: Can GCNs Go as Deep as CNNs? In this work, we present new ways to successfully train very deep GCNs. We borrow concepts from CNNs, mainly re
 612 Nov 15, 2022
612 Nov 15, 2022
ADOP: Approximate Differentiable One-Pixel Point Rendering
ADOP: Approximate Differentiable One-Pixel Point Rendering Abstract: We present a novel point-based, differentiable neural rendering pipeline for scen
 1.9k Jan 6, 2023
1.9k Jan 6, 2023

Official Implementation (PyTorch) of "Point Cloud Augmentation with Weighted Local Transformations", ICCV 2021
PointWOLF: Point Cloud Augmentation with Weighted Local Transformations This repository is the implementation of PointWOLF(To appear). Sihyeon Kim1*,
 16 Nov 3, 2022
16 Nov 3, 2022
Continuous Conditional Random Field Convolution for Point Cloud Segmentation
CRFConv This repository is the implementation of "Continuous Conditional Random Field Convolution for Point Cloud Segmentation" 1. Setup 1) Building c
 8 Dec 8, 2022
8 Dec 8, 2022
Posterior predictive distributions quantify uncertainties ignored by point estimates.
Posterior predictive distributions quantify uncertainties ignored by point estimates.
 177 Dec 6, 2022
177 Dec 6, 2022
Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021.
SphereRPN Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021. Authors: Th
 15 Dec 2, 2022
15 Dec 2, 2022

Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021)
Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021) Alexey Nekrasov*, Jonas Schult*, Or Litany, Bastian Leibe, Francis Engelmann Mix3D is
 189 Dec 26, 2022
189 Dec 26, 2022
![[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer](https://github.com/AllenXiangX/SnowflakeNet/raw/main/pics/network.png)
[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
This repository contains the source code for the paper SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer (ICCV 2021 Oral). The project page is here.
 65 Dec 26, 2022
65 Dec 26, 2022
Uses WiFi signals :signal_strength: and machine learning to predict where you are
Uses WiFi signals and machine learning (sklearn's RandomForest) to predict where you are. Even works for small distances like 2-10 meters.
 5k Jan 9, 2023
5k Jan 9, 2023

GndNet: Fast ground plane estimation and point cloud segmentation for autonomous vehicles using deep neural networks.
GndNet: Fast Ground plane Estimation and Point Cloud Segmentation for Autonomous Vehicles. Authors: Anshul Paigwar, Ozgur Erkent, David Sierra Gonzale
 114 Dec 29, 2022
114 Dec 29, 2022
Pre-training BERT masked language models with custom vocabulary
Pre-training BERT Masked Language Models (MLM) This repository contains the method to pre-train a BERT model using custom vocabulary. It was used to p
 14 Nov 2, 2022
14 Nov 2, 2022
An easy-to-use Python module that helps you to extract the BERT embeddings for a large text dataset (Bengali/English) efficiently.
An easy-to-use Python module that helps you to extract the BERT embeddings for a large text dataset (Bengali/English) efficiently.
 37 Sep 5, 2022
37 Sep 5, 2022
PyTorch implementation for View-Guided Point Cloud Completion
PyTorch implementation for View-Guided Point Cloud Completion
 22 Jan 4, 2023
22 Jan 4, 2023
Float2Binary - A simple python class which finds the binary representation of a floating-point number.
Float2Binary A simple python class which finds the binary representation of a floating-point number. You can find a class in IEEE754.py file with the
 3 Dec 14, 2021
3 Dec 14, 2021

Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021)
Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021) This repository contains the code
 149 Dec 15, 2022
149 Dec 15, 2022

DGCNN - Dynamic Graph CNN for Learning on Point Clouds
DGCNN is the author's re-implementation of Dynamic Graph CNN, which achieves state-of-the-art performance on point-cloud-related high-level tasks including category classification, semantic segmentation and part segmentation.
 1.3k Dec 26, 2022
1.3k Dec 26, 2022

Google and Stanford University released a new pre-trained model called ELECTRA
Google and Stanford University released a new pre-trained model called ELECTRA, which has a much compact model size and relatively competitive performance compared to BERT and its variants. For further accelerating the research of the Chinese pre-trained model, the Joint Laboratory of HIT and iFLYTEK Research (HFL) has released the Chinese ELECTRA models based on the official code of ELECTRA. ELECTRA-small could reach similar or even higher scores on several NLP tasks with only 1/10 parameters compared to BERT and its variants.
 1.2k Dec 30, 2022
1.2k Dec 30, 2022

Transformers4Rec is a flexible and efficient library for sequential and session-based recommendation, available for both PyTorch and Tensorflow.
Transformers4Rec is a flexible and efficient library for sequential and session-based recommendation, available for both PyTorch and Tensorflow.
 730 Jan 9, 2023
730 Jan 9, 2023
Pre-trained BERT Models for Ancient and Medieval Greek, and associated code for LaTeCH 2021 paper titled - "A Pilot Study for BERT Language Modelling and Morphological Analysis for Ancient and Medieval Greek"
Ancient Greek BERT The first and only available Ancient Greek sub-word BERT model! State-of-the-art post fine-tuning on Part-of-Speech Tagging and Mor
 22 Dec 8, 2022
22 Dec 8, 2022
An inofficial PyTorch implementation of PREDATOR based on KPConv.
PREDATOR: Registration of 3D Point Clouds with Low Overlap An inofficial PyTorch implementation of PREDATOR based on KPConv. The code has been tested
 14 Aug 3, 2022
14 Aug 3, 2022

An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
 33 Jan 3, 2023
33 Jan 3, 2023
Point Cloud Registration using Representative Overlapping Points.
Point Cloud Registration using Representative Overlapping Points (ROPNet) Abstract 3D point cloud registration is a fundamental task in robotics and c
36 Dec 16, 2022
Code and data form the paper BERT Got a Date: Introducing Transformers to Temporal Tagging
BERT Got a Date: Introducing Transformers to Temporal Tagging Satya Almasian*, Dennis Aumiller*, and Michael Gertz Heidelberg University Contact us vi
 54 Dec 4, 2022
54 Dec 4, 2022
🤗 Transformers: State-of-the-art Natural Language Processing for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 State-of-the-art Natural Language Processing for Jax, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrained mo
 77.2k Jan 2, 2023
77.2k Jan 2, 2023
Transformers4Rec is a flexible and efficient library for sequential and session-based recommendation, available for both PyTorch and Tensorflow.
Transformers4Rec is a flexible and efficient library for sequential and session-based recommendation, available for both PyTorch and Tensorflow.
730 Jan 9, 2023
A model library for exploring state-of-the-art deep learning topologies and techniques for optimizing Natural Language Processing neural networks
A Deep Learning NLP/NLU library by Intel® AI Lab Overview | Models | Installation | Examples | Documentation | Tutorials | Contributing NLP Architect
 2.9k Dec 31, 2022
2.9k Dec 31, 2022
Applying "Load What You Need: Smaller Versions of Multilingual BERT" to LaBSE
smaller-LaBSE LaBSE(Language-agnostic BERT Sentence Embedding) is a very good method to get sentence embeddings across languages. But it is hard to fi
 13 Sep 2, 2022
13 Sep 2, 2022

This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction".
TreePartNet This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction". Depende
 34 Nov 30, 2022
34 Nov 30, 2022
Natural Language Processing with transformers
we want to create a repo to illustrate usage of transformers in chinese
 763 Dec 27, 2022
763 Dec 27, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022
Point cloud processing tool library.
Point Cloud ToolBox This point cloud processing tool library can be used to process point clouds, 3d meshes, and voxels. Environment python 3.7.5 Dep
 40 Dec 9, 2022
40 Dec 9, 2022
Code for the paper "Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds" (ICCV 2021)
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds This is the official code implementation for the paper "Spatio-temporal Se
 63 Jan 5, 2023
63 Jan 5, 2023
Code Release for ICCV 2021 (oral), "AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds"
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds (ICCV 2021 oral) **Project Page | Arxiv ** Runsong Zhu¹, Yuan Liu², Zhen Dong¹, Te
 40 Dec 30, 2022
40 Dec 30, 2022

Source code for the paper "TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations"
TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations Created by Jiahao Pang, Duanshun Li, and Dong Tian from InterDigital In
 21 Dec 29, 2022
21 Dec 29, 2022
Adaptive Graph Convolution for Point Cloud Analysis
Adaptive Graph Convolution for Point Cloud Analysis This repository contains the implementation of AdaptConv for point cloud analysis. Adaptive Graph
 64 Dec 21, 2022
64 Dec 21, 2022
Pytorch-version BERT-flow: One can apply BERT-flow to any PLM within Pytorch framework.
Pytorch-version BERT-flow: One can apply BERT-flow to any PLM within Pytorch framework.
 59 Dec 1, 2022
59 Dec 1, 2022
This repository contains the official release of the model "BanglaBERT" and associated downstream finetuning code and datasets introduced in the paper titled "BanglaBERT: Combating Embedding Barrier in Multilingual Models for Low-Resource Language Understanding".
BanglaBERT This repository contains the official release of the model "BanglaBERT" and associated downstream finetuning code and datasets introduced i
 197 Dec 25, 2022
197 Dec 25, 2022

The code for our paper "NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task —— Next Sentence Prediction"
The code for our paper "NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task —— Next Sentence Prediction"
 201 Nov 21, 2022
201 Nov 21, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
 101 Dec 5, 2022
101 Dec 5, 2022
multi-label,classifier,text classification,多标签文本分类,文本分类,BERT,ALBERT,multi-label-classification,seq2seq,attention,beam search
multi-label,classifier,text classification,多标签文本分类,文本分类,BERT,ALBERT,multi-label-classification,seq2seq,attention,beam search
 30 Dec 12, 2022
30 Dec 12, 2022
Ptorch NLU, a Chinese text classification and sequence annotation toolkit, supports multi class and multi label classification tasks of Chinese long text and short text, and supports sequence annotation tasks such as Chinese named entity recognition, part of speech tagging and word segmentation.
Pytorch-NLU,一个中文文本分类、序列标注工具包,支持中文长文本、短文本的多类、多标签分类任务,支持中文命名实体识别、词性标注、分词等序列标注任务。 Ptorch NLU, a Chinese text classification and sequence annotation toolkit, supports multi class and multi label classification tasks of Chinese long text and short text, and supports sequence annotation tasks such as Chinese named entity recognition, part of speech tagging and word segmentation.
 186 Dec 24, 2022
186 Dec 24, 2022
超轻量级bert的pytorch版本,大量中文注释,容易修改结构,持续更新
bert4pytorch 2021年8月27更新: 感谢大家的star,最近有小伙伴反映了一些小的bug,我也注意到了,奈何这个月工作上实在太忙,更新不及时,大约会在9月中旬集中更新一个只需要pip一下就完全可用的版本,然后会新添加一些关键注释。 再增加对抗训练的内容,更新一个完整的finetune
 317 Dec 18, 2022
317 Dec 18, 2022

You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors
You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors In this paper, we propose a novel local descriptor-based fra
 80 Dec 15, 2022
80 Dec 15, 2022

CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework
CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework This repository contains a framework for Recommender Systems (RecSys), a
 8 Jul 3, 2022
8 Jul 3, 2022

Deep Learning for 3D Point Clouds: A Survey (IEEE TPAMI, 2020)
🔥Deep Learning for 3D Point Clouds (IEEE TPAMI, 2020)
 1.4k Jan 8, 2023
1.4k Jan 8, 2023
pyntcloud is a Python library for working with 3D point clouds.
pyntcloud is a Python library for working with 3D point clouds.
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

Ongoing research training transformer language models at scale, including: BERT & GPT-2
Megatron (1 and 2) is a large, powerful transformer developed by the Applied Deep Learning Research team at NVIDIA.
 3.5k Dec 30, 2022
3.5k Dec 30, 2022

The official implementation of ICCV paper "Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds".
Box-Aware Tracker (BAT) Pytorch-Lightning implementation of the Box-Aware Tracker. Box-Aware Feature Enhancement for Single Object Tracking on Point C
 5 Mar 26, 2022
5 Mar 26, 2022

A BERT-based reverse dictionary of Korean proverbs
Wisdomify A BERT-based reverse-dictionary of Korean proverbs. 김유빈 : 모델링 / 데이터 수집 / 프로젝트 설계 / back-end 김종윤 : 데이터 수집 / 프로젝트 설계 / front-end / back-end 임용
 94 Dec 8, 2022
94 Dec 8, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal Action Localization' (ICCV-21 Oral)
Learning-Action-Completeness-from-Points Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal A
 67 Jan 3, 2023
67 Jan 3, 2023
Pip-package for trajectory benchmarking from "Be your own Benchmark: No-Reference Trajectory Metric on Registered Point Clouds", ECMR'21
Map Metrics for Trajectory Quality Map metrics toolkit provides a set of metrics to quantitatively evaluate trajectory quality via estimating consiste
 31 Oct 28, 2022
31 Oct 28, 2022

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 2, 2022
22 Dec 2, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022
Named Entity Recognition with Small Strongly Labeled and Large Weakly Labeled Data
Named Entity Recognition with Small Strongly Labeled and Large Weakly Labeled Data arXiv This is the code base for weakly supervised NER. We provide a
 92 Jan 4, 2023
92 Jan 4, 2023

The tl;dr on a few notable transformer/language model papers + other papers (alignment, memorization, etc).
The tl;dr on a few notable transformer/language model papers + other papers (alignment, memorization, etc).
 166 Jan 4, 2023
166 Jan 4, 2023

This is the official code of our paper "Diversity-based Trajectory and Goal Selection with Hindsight Experience Relay" (PRICAI 2021)
Diversity-based Trajectory and Goal Selection with Hindsight Experience Replay This is the official implementation of our paper "Diversity-based Traje
 6 Jul 18, 2022
6 Jul 18, 2022
Learn meanings behind words is a key element in NLP. This project concentrates on the disambiguation of preposition senses. Therefore, we train a bert-transformer model and surpass the state-of-the-art.
New State-of-the-Art in Preposition Sense Disambiguation Supervisor: Prof. Dr. Alexander Mehler Alexander Henlein Institutions: Goethe University TTLa
 4 Apr 6, 2022
4 Apr 6, 2022
Ongoing research training transformer language models at scale, including: BERT & GPT-2
What is this fork of Megatron-LM and Megatron-DeepSpeed This is a detached fork of https://github.com/microsoft/Megatron-DeepSpeed, which in itself is
 316 Jan 3, 2023
316 Jan 3, 2023
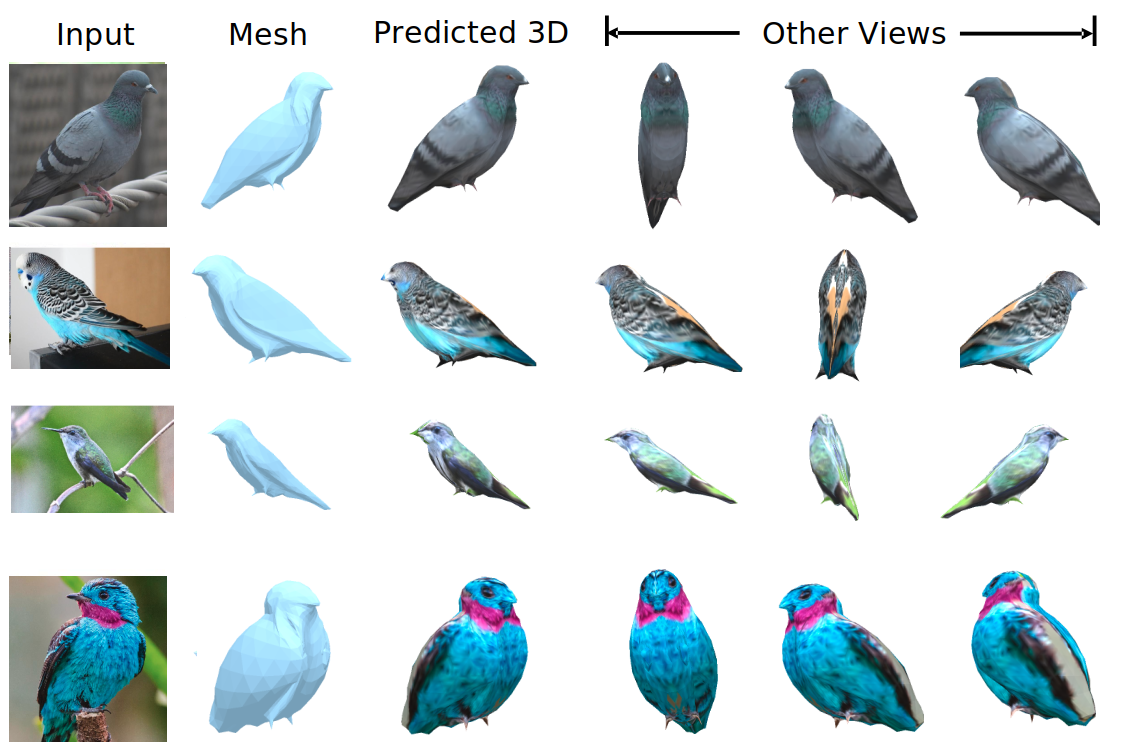
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

Using VideoBERT to tackle video prediction
VideoBERT This repo reproduces the results of VideoBERT (https://arxiv.org/pdf/1904.01766.pdf). Inspiration was taken from https://github.com/MDSKUL/M
 75 Dec 14, 2022
75 Dec 14, 2022

(CVPR2021) Kaleido-BERT: Vision-Language Pre-training on Fashion Domain
Kaleido-BERT: Vision-Language Pre-training on Fashion Domain Mingchen Zhuge*, Dehong Gao*, Deng-Ping Fan#, Linbo Jin, Ben Chen, Haoming Zhou, Minghui
 250 Jan 8, 2023
250 Jan 8, 2023
LightSeq is a high performance training and inference library for sequence processing and generation implemented in CUDA
LightSeq: A High Performance Library for Sequence Processing and Generation
 2.5k Jan 6, 2023
2.5k Jan 6, 2023

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
 27 Dec 15, 2022
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

Punctuation Restoration using Transformer Models for High-and Low-Resource Languages
Punctuation Restoration using Transformer Models This repository contins official implementation of the paper Punctuation Restoration using Transforme
 142 Jan 1, 2023
142 Jan 1, 2023
This demo showcase the use of onnxruntime-rs with a GPU on CUDA 11 to run Bert in a data pipeline with Rust.
Demo BERT ONNX pipeline written in rust This demo showcase the use of onnxruntime-rs with a GPU on CUDA 11 to run Bert in a data pipeline with Rust. R
 14 Dec 17, 2022
14 Dec 17, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Implementing SimCSE(paper, official repository) using TensorFlow 2 and KR-BERT.
KR-BERT-SimCSE Implementing SimCSE(paper, official repository) using TensorFlow 2 and KR-BERT. Training Unsupervised python train_unsupervised.py --mi
27 Dec 12, 2022
REST API for sentence tokenization and embedding using Multilingual Universal Sentence Encoder.
MUSE stands for Multilingual Universal Sentence Encoder - multilingual extension (supports 16 languages) of Universal Sentence Encoder (USE).
 47 Sep 5, 2022
47 Sep 5, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022

Learned Token Pruning for Transformers
LTP: Learned Token Pruning for Transformers Check our paper for more details. Installation We follow the same installation procedure as the original H
 52 Dec 29, 2022
52 Dec 29, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022
🤗 Transformers: State-of-the-art Natural Language Processing for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 State-of-the-art Natural Language Processing for Jax, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrained mo
77.2k Jan 3, 2023

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022