532 Repositories
Python Point-BERT Libraries

A heterogeneous entity-augmented academic language model based on Open Academic Graph (OAG)
Library | Paper | Slack We released two versions of OAG-BERT in CogDL package. OAG-BERT is a heterogeneous entity-augmented academic language model wh
 58 Dec 17, 2022
58 Dec 17, 2022
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
 43 Nov 21, 2022
43 Nov 21, 2022

Official repository for the paper, MidiBERT-Piano: Large-scale Pre-training for Symbolic Music Understanding.
MidiBERT-Piano Authors: Yi-Hui (Sophia) Chou, I-Chun (Bronwin) Chen Introduction This is the official repository for the paper, MidiBERT-Piano: Large-
 137 Dec 15, 2022
137 Dec 15, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
 90 Dec 29, 2022
90 Dec 29, 2022

VD-BERT: A Unified Vision and Dialog Transformer with BERT
VD-BERT: A Unified Vision and Dialog Transformer with BERT PyTorch Code for the following paper at EMNLP2020: Title: VD-BERT: A Unified Vision and Dia
 44 Nov 1, 2022
44 Nov 1, 2022
VD-BERT: A Unified Vision and Dialog Transformer with BERT
VD-BERT: A Unified Vision and Dialog Transformer with BERT PyTorch Code for the following paper at EMNLP2020: Title: VD-BERT: A Unified Vision and Dia
44 Nov 1, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022
Huggingface Transformers + Adapters = ❤️
adapter-transformers A friendly fork of HuggingFace's Transformers, adding Adapters to PyTorch language models adapter-transformers is an extension of
 1.2k Jan 9, 2023
1.2k Jan 9, 2023
The source codes for ACL 2021 paper 'BoB: BERT Over BERT for Training Persona-based Dialogue Models from Limited Personalized Data'
BoB: BERT Over BERT for Training Persona-based Dialogue Models from Limited Personalized Data This repository provides the implementation details for
 124 Dec 27, 2022
124 Dec 27, 2022
PyTorch impelementations of BERT-based Spelling Error Correction Models
PyTorch impelementations of BERT-based Spelling Error Correction Models
 59 Jun 29, 2021
59 Jun 29, 2021
PyTorch impelementations of BERT-based Spelling Error Correction Models.
PyTorch impelementations of BERT-based Spelling Error Correction Models. 基于BERT的文本纠错模型,使用PyTorch实现。
209 Dec 30, 2022

A BERT-based reverse-dictionary of Korean proverbs
Wisdomify A BERT-based reverse-dictionary of Korean proverbs. 김유빈 : 모델링 / 데이터 수집 / 프로젝트 설계 / back-end 김종윤 : 데이터 수집 / 프로젝트 설계 / front-end Quick Start C
 94 Dec 8, 2022
94 Dec 8, 2022

This repo is a PyTorch implementation for Paper "Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds"
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds This repository is a PyTorch implementation for paper: Uns
 42 Dec 9, 2022
42 Dec 9, 2022

Code for "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" @ICRA2021
CloudAAE This is an tensorflow implementation of "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" Files log:
 35 Nov 14, 2022
35 Nov 14, 2022
LV-BERT: Exploiting Layer Variety for BERT (Findings of ACL 2021)
LV-BERT Introduction In this repo, we introduce LV-BERT by exploiting layer variety for BERT. For detailed description and experimental results, pleas
 14 Aug 24, 2022
14 Aug 24, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
LV-BERT: Exploiting Layer Variety for BERT (Findings of ACL 2021)
LV-BERT Introduction In this repo, we introduce LV-BERT by exploiting layer variety for BERT. For detailed description and experimental results, pleas
14 Aug 24, 2022
A new GCN model for Point Cloud Analyse
Pytorch Implementation of PointNet and PointNet++ This repo is implementation for VA-GCN in pytorch. Classification (ModelNet10/40) Data Preparation D
 12 Feb 2, 2022
12 Feb 2, 2022

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 4, 2023
115 Jan 4, 2023

TunBERT is the first release of a pre-trained BERT model for the Tunisian dialect using a Tunisian Common-Crawl-based dataset.
TunBERT is the first release of a pre-trained BERT model for the Tunisian dialect using a Tunisian Common-Crawl-based dataset. TunBERT was applied to three NLP downstream tasks: Sentiment Analysis (SA), Tunisian Dialect Identification (TDI) and Reading Comprehension Question-Answering (RCQA)
 72 Dec 9, 2022
72 Dec 9, 2022
A Python package for floating-point binary fractions. Do math in base 2!
An implementation of a floating-point binary fractions class and module in Python. Work with binary fractions and binary floats with ease!
 10 Oct 29, 2022
10 Oct 29, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022
Python Implementation of ``Modeling the Influence of Verb Aspect on the Activation of Typical Event Locations with BERT'' (Findings of ACL: ACL 2021)
BERT-for-Surprisal Python Implementation of ``Modeling the Influence of Verb Aspect on the Activation of Typical Event Locations with BERT'' (Findings
 7 Dec 5, 2022
7 Dec 5, 2022
Baseline code for Korean open domain question answering(ODQA)
Open-Domain Question Answering(ODQA)는 다양한 주제에 대한 문서 집합으로부터 자연어 질의에 대한 답변을 찾아오는 task입니다. 이때 사용자 질의에 답변하기 위해 주어지는 지문이 따로 존재하지 않습니다. 따라서 사전에 구축되어있는 Knowl
 69 Nov 4, 2022
69 Nov 4, 2022

Implementation of the "Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos" paper.
Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos Introduction Point cloud videos exhibit irregularities and lack of or
 101 Dec 29, 2022
101 Dec 29, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

The official implementation of You Only Compress Once: Towards Effective and Elastic BERT Compression via Exploit-Explore Stochastic Nature Gradient.
You Only Compress Once: Towards Effective and Elastic BERT Compression via Exploit-Explore Stochastic Nature Gradient (paper) @misc{zhang2021compress,
 46 Dec 7, 2022
46 Dec 7, 2022

Source code for NAACL 2021 paper "TR-BERT: Dynamic Token Reduction for Accelerating BERT Inference"
TR-BERT Source code and dataset for "TR-BERT: Dynamic Token Reduction for Accelerating BERT Inference". The code is based on huggaface's transformers.
 37 Oct 30, 2022
37 Oct 30, 2022

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023

3D AffordanceNet is a 3D point cloud benchmark consisting of 23k shapes from 23 semantic object categories, annotated with 56k affordance annotations and covering 18 visual affordance categories.
3D AffordanceNet This repository is the official experiment implementation of 3D AffordanceNet benchmark. 3D AffordanceNet is a 3D point cloud benchma
 49 Dec 1, 2022
49 Dec 1, 2022
Chinese clinical named entity recognition using pre-trained BERT model
Chinese clinical named entity recognition (CNER) using pre-trained BERT model Introduction Code for paper Chinese clinical named entity recognition wi
 109 Dec 14, 2022
109 Dec 14, 2022

Registration Loss Learning for Deep Probabilistic Point Set Registration
RLLReg This repository contains a Pytorch implementation of the point set registration method RLLReg. Details about the method can be found in the 3DV
 35 Nov 2, 2022
35 Nov 2, 2022

Code for the ACL2021 paper "Lexicon Enhanced Chinese Sequence Labelling Using BERT Adapter"
Lexicon Enhanced Chinese Sequence Labeling Using BERT Adapter Code and checkpoints for the ACL2021 paper "Lexicon Enhanced Chinese Sequence Labelling
 274 Dec 6, 2022
274 Dec 6, 2022

Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving
SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving Abstract In this paper, we introduce SalsaNext f
 308 Jan 4, 2023
308 Jan 4, 2023

(CVPR2021) Kaleido-BERT: Vision-Language Pre-training on Fashion Domain
Kaleido-BERT: Vision-Language Pre-training on Fashion Domain Mingchen Zhuge*, Dehong Gao*, Deng-Ping Fan#, Linbo Jin, Ben Chen, Haoming Zhou, Minghui
 248 Dec 4, 2022
248 Dec 4, 2022
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
44 Jan 6, 2023
source code the paper Fast and Robust Iterative Closet Point.
Fast-Robust-ICP This repository includes the source code the paper Fast and Robust Iterative Closet Point. Authors: Juyong Zhang, Yuxin Yao, Bailin De
 320 Dec 28, 2022
320 Dec 28, 2022
Accompanying code for our paper "Point Cloud Audio Processing"
Point Cloud Audio Processing Krishna Subramani1, Paris Smaragdis1 1UIUC Paper For the necessary libraries/prerequisites, please use conda/anaconda to
 17 Nov 17, 2022
17 Nov 17, 2022
Train 🤗transformers with DeepSpeed: ZeRO-2, ZeRO-3
Fork from https://github.com/huggingface/transformers/tree/86d5fb0b360e68de46d40265e7c707fe68c8015b/examples/pytorch/language-modeling at 2021.05.17.
 12 Oct 26, 2022
12 Oct 26, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022
Deep Compression for Dense Point Cloud Maps.
DEPOCO This repository implements the algorithms described in our paper Deep Compression for Dense Point Cloud Maps. How to get started (using Docker)
 67 Dec 6, 2022
67 Dec 6, 2022
![[NAACL & ACL 2021] SapBERT: Self-alignment pretraining for BERT.](https://github.com/cambridgeltl/sapbert/raw/main/sapbert_front_graphs_v6.png?raw=true)
[NAACL & ACL 2021] SapBERT: Self-alignment pretraining for BERT.
SapBERT: Self-alignment pretraining for BERT This repo holds code for the SapBERT model presented in our NAACL 2021 paper: Self-Alignment Pretraining
 104 Dec 7, 2022
104 Dec 7, 2022
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
 17 May 16, 2021
17 May 16, 2021

MILES is a multilingual text simplifier inspired by LSBert - A BERT-based lexical simplification approach proposed in 2018. Unlike LSBert, MILES uses the bert-base-multilingual-uncased model, as well as simple language-agnostic approaches to complex word identification (CWI) and candidate ranking.
MILES Multilingual Lexical Simplifier Explore the docs » Read LSBert Paper · Report Bug · Request Feature About The Project MILES is a multilingual te
 45 Oct 19, 2022
45 Oct 19, 2022
Integrating the Best of TF into PyTorch, for Machine Learning, Natural Language Processing, and Text Generation. This is part of the CASL project: http://casl-project.ai/
Texar-PyTorch is a toolkit aiming to support a broad set of machine learning, especially natural language processing and text generation tasks. Texar
 726 Dec 30, 2022
726 Dec 30, 2022

Pytorch-Named-Entity-Recognition-with-BERT
BERT NER Use google BERT to do CoNLL-2003 NER ! Train model using Python and Inference using C++ ALBERT-TF2.0 BERT-NER-TENSORFLOW-2.0 BERT-SQuAD Requi
 1.1k Dec 25, 2022
1.1k Dec 25, 2022
Google AI 2018 BERT pytorch implementation
BERT-pytorch Pytorch implementation of Google AI's 2018 BERT, with simple annotation BERT 2018 BERT: Pre-training of Deep Bidirectional Transformers f
 5.3k Jan 7, 2023
5.3k Jan 7, 2023
jiant is an NLP toolkit
jiant is an NLP toolkit The multitask and transfer learning toolkit for natural language processing research Why should I use jiant? jiant supports mu
 1.5k Jan 4, 2023
1.5k Jan 4, 2023

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Codes for our paper "SentiLARE: Sentiment-Aware Language Representation Learning with Linguistic Knowledge" (EMNLP 2020)
SentiLARE: Sentiment-Aware Language Representation Learning with Linguistic Knowledge Introduction SentiLARE is a sentiment-aware pre-trained language
 74 Dec 30, 2022
74 Dec 30, 2022
QuickAI is a Python library that makes it extremely easy to experiment with state-of-the-art Machine Learning models.
QuickAI is a Python library that makes it extremely easy to experiment with state-of-the-art Machine Learning models.
 152 Jan 2, 2023
152 Jan 2, 2023
An Easy-to-use, Modular and Prolongable package of deep-learning based Named Entity Recognition Models.
DeepNER An Easy-to-use, Modular and Prolongable package of deep-learning based Named Entity Recognition Models. This repository contains complex Deep
 9 May 30, 2022
9 May 30, 2022
QuickAI is a Python library that makes it extremely easy to experiment with state-of-the-art Machine Learning models.
QuickAI is a Python library that makes it extremely easy to experiment with state-of-the-art Machine Learning models.
152 Jan 2, 2023
LightSeq: A High-Performance Inference Library for Sequence Processing and Generation
LightSeq is a high performance inference library for sequence processing and generation implemented in CUDA. It enables highly efficient computation of modern NLP models such as BERT, GPT2, Transformer, etc. It is therefore best useful for Machine Translation, Text Generation, Dialog, Language Modelling, and other related tasks using these models.
 2.5k Jan 3, 2023
2.5k Jan 3, 2023

 387 Jan 4, 2023
387 Jan 4, 2023
Implementation of "Fast and Flexible Temporal Point Processes with Triangular Maps" (Oral @ NeurIPS 2020)
Fast and Flexible Temporal Point Processes with Triangular Maps This repository includes a reference implementation of the algorithms described in "Fa
 20 Dec 2, 2022
20 Dec 2, 2022
Code for the paper "Improving Vision-and-Language Navigation with Image-Text Pairs from the Web" (ECCV 2020)
Improving Vision-and-Language Navigation with Image-Text Pairs from the Web Arjun Majumdar, Ayush Shrivastava, Stefan Lee, Peter Anderson, Devi Parikh
 44 Dec 14, 2022
44 Dec 14, 2022

Rendering Point Clouds with Compute Shaders
Compute Shader Based Point Cloud Rendering This repository contains the source code to our techreport: Rendering Point Clouds with Compute Shaders and
 460 Jan 5, 2023
460 Jan 5, 2023
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
121 Dec 12, 2022
![[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation](https://github.com/Na-Z/attMPTI/raw/main/framework.jpg)
[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation
Few-shot 3D Point Cloud Semantic Segmentation Created by Na Zhao from National University of Singapore Introduction This repository contains the PyTor
 117 Dec 27, 2022
117 Dec 27, 2022

Self-Supervised Learning for Domain Adaptation on Point-Clouds
Self-Supervised Learning for Domain Adaptation on Point-Clouds Introduction Self-supervised learning (SSL) allows to learn useful representations from
 66 Dec 20, 2022
66 Dec 20, 2022

(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
 86 Oct 5, 2022
86 Oct 5, 2022
(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
86 Oct 5, 2022
Pytorch version of BERT-whitening
BERT-whitening This is the Pytorch implementation of "Whitening Sentence Representations for Better Semantics and Faster Retrieval". BERT-whitening is
 255 Dec 27, 2022
255 Dec 27, 2022
Weakly supervised medical named entity classification
Trove Trove is a research framework for building weakly supervised (bio)medical named entity recognition (NER) and other entity attribute classifiers
 60 Nov 18, 2022
60 Nov 18, 2022

Official PyTorch implementation of CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds Introduction This is the official PyTorch implementation of o
 96 Dec 7, 2022
96 Dec 7, 2022

Python library containing BART query generation and BERT-based Siamese models for neural retrieval.
Neural Retrieval Embedding-based Zero-shot Retrieval through Query Generation leverages query synthesis over large corpuses of unlabeled text (such as
 35 Apr 14, 2022
35 Apr 14, 2022

I-BERT: Integer-only BERT Quantization
I-BERT: Integer-only BERT Quantization HuggingFace Implementation I-BERT is also available in the master branch of HuggingFace! Visit the following li
 139 Dec 27, 2022
139 Dec 27, 2022
MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch, towards the next-generation platform for general 3D detection. It is a part of the OpenMMLab project developed by MMLab.
 3.2k Jan 5, 2023
3.2k Jan 5, 2023

Implementation of CVPR'21: RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction
RfD-Net [Project Page] [Paper] [Video] RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction Yinyu Nie, Ji Hou, Xiaoguang Han, Matthi
 162 Jan 6, 2023
162 Jan 6, 2023
Tool for visualizing attention in the Transformer model (BERT, GPT-2, Albert, XLNet, RoBERTa, CTRL, etc.)
Tool for visualizing attention in the Transformer model (BERT, GPT-2, Albert, XLNet, RoBERTa, CTRL, etc.)
 4.7k Jan 1, 2023
4.7k Jan 1, 2023
Code for pre-training CharacterBERT models (as well as BERT models).
Pre-training CharacterBERT (and BERT) This is a repository for pre-training BERT and CharacterBERT. DISCLAIMER: The code was largely adapted from an o
 31 Dec 5, 2022
31 Dec 5, 2022

Implementation of the "PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences" paper.
PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences Introduction Point cloud sequences are irregular and unordered in the spatial dimen
63 Dec 9, 2022
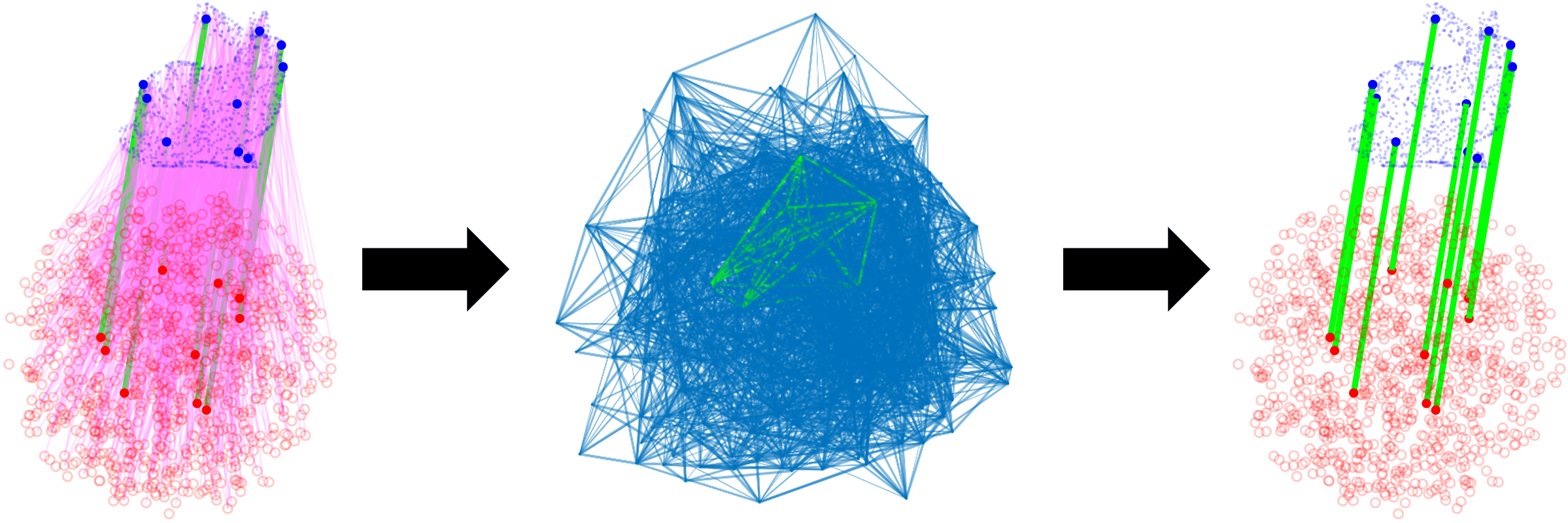
![[PyTorch] Official implementation of CVPR2021 paper](https://github.com/XuyangBai/PointDSC/raw/master/figures/pipeline.png)
[PyTorch] Official implementation of CVPR2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency". https://arxiv.org/abs/2103.05465
PointDSC repository PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency",
 153 Dec 14, 2022
153 Dec 14, 2022

Combining Automatic Labelers and Expert Annotations for Accurate Radiology Report Labeling Using BERT
CheXbert: Combining Automatic Labelers and Expert Annotations for Accurate Radiology Report Labeling Using BERT CheXbert is an accurate, automated dee
 51 Dec 8, 2022
51 Dec 8, 2022

Transformer related optimization, including BERT, GPT
This repository provides a script and recipe to run the highly optimized transformer-based encoder and decoder component, and it is tested and maintained by NVIDIA.
 1.7k Jan 4, 2023
1.7k Jan 4, 2023
Adversarial Adaptation with Distillation for BERT Unsupervised Domain Adaptation
Knowledge Distillation for BERT Unsupervised Domain Adaptation Official PyTorch implementation | Paper Abstract A pre-trained language model, BERT, ha
 29 Nov 30, 2022
29 Nov 30, 2022

《A-CNN: Annularly Convolutional Neural Networks on Point Clouds》(2019)
A-CNN: Annularly Convolutional Neural Networks on Point Clouds Created by Artem Komarichev, Zichun Zhong, Jing Hua from Department of Computer Science
 44 Feb 24, 2022
44 Feb 24, 2022

(CVPR 2021) PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds by Mutian Xu*, Runyu Ding*, Hengshuang Zhao, and Xiaojuan Qi. Int
 228 Dec 25, 2022
228 Dec 25, 2022
Top2Vec is an algorithm for topic modeling and semantic search.
Top2Vec is an algorithm for topic modeling and semantic search. It automatically detects topics present in text and generates jointly embedded topic, document and word vectors.
 2.4k Jan 6, 2023
2.4k Jan 6, 2023

Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021)
Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021) An efficient PyTorch library for Point Cloud Completion.
 119 Jan 2, 2023
119 Jan 2, 2023

Official implementation of YOGO for Point-Cloud Processing
You Only Group Once: Efficient Point-Cloud Processing with Token Representation and Relation Inference Module By Chenfeng Xu, Bohan Zhai, Bichen Wu, T
 67 Dec 20, 2022
67 Dec 20, 2022

CUAD
Contract Understanding Atticus Dataset This repository contains code for the Contract Understanding Atticus Dataset (CUAD), a dataset for legal contra
 273 Dec 17, 2022
273 Dec 17, 2022
This project is the official implementation of our accepted ICLR 2021 paper BiPointNet: Binary Neural Network for Point Clouds.
BiPointNet: Binary Neural Network for Point Clouds Created by Haotong Qin, Zhongang Cai, Mingyuan Zhang, Yifu Ding, Haiyu Zhao, Shuai Yi, Xianglong Li
 59 Dec 17, 2022
59 Dec 17, 2022
Contract Understanding Atticus Dataset
Contract Understanding Atticus Dataset This repository contains code for the Contract Understanding Atticus Dataset (CUAD), a dataset for legal contra
273 Dec 17, 2022
Minimalist BERT implementation assignment for CS11-747
minbert Assignment by Zhengbao Jiang, Shuyan Zhou, and Ritam Dutt This is an exercise in developing a minimalist version of BERT, part of Carnegie Mel
 51 Jan 3, 2023
51 Jan 3, 2023

本项目是作者们根据个人面试和经验总结出的自然语言处理(NLP)面试准备的学习笔记与资料,该资料目前包含 自然语言处理各领域的 面试题积累。
【关于 NLP】那些你不知道的事 作者:杨夕、芙蕖、李玲、陈海顺、twilight、LeoLRH、JimmyDU、艾春辉、张永泰、金金金 介绍 本项目是作者们根据个人面试和经验总结出的自然语言处理(NLP)面试准备的学习笔记与资料,该资料目前包含 自然语言处理各领域的 面试题积累。 目录架构 一、【
 1.4k Dec 30, 2022
1.4k Dec 30, 2022
Code associated with the "Data Augmentation using Pre-trained Transformer Models" paper
Data Augmentation using Pre-trained Transformer Models Code associated with the Data Augmentation using Pre-trained Transformer Models paper Code cont
 44 Dec 31, 2022
44 Dec 31, 2022
Module for statistical learning, with a particular emphasis on time-dependent modelling
Operating system Build Status Linux/Mac Windows tick tick is a Python 3 module for statistical learning, with a particular emphasis on time-dependent
 410 Dec 14, 2022
410 Dec 14, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering
UnsupervisedR&R: Unsupervised Pointcloud Registration via Differentiable Rendering This repository holds all the code and data for our recent work on
 118 Dec 6, 2022
118 Dec 6, 2022

A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF or LFI.
BurpParamFlagger A Burp extension adding a passive scan check to flag parameters whose name or value may indicate a possible insertion point for SSRF
 118 Nov 7, 2022
118 Nov 7, 2022
A general 3D Object Detection codebase in PyTorch.
Det3D is the first 3D Object Detection toolbox which provides off the box implementations of many 3D object detection algorithms such as PointPillars, SECOND, PIXOR, etc, as well as state-of-the-art methods on major benchmarks like KITTI(ViP) and nuScenes(CBGS).
 1.4k Jan 5, 2023
1.4k Jan 5, 2023
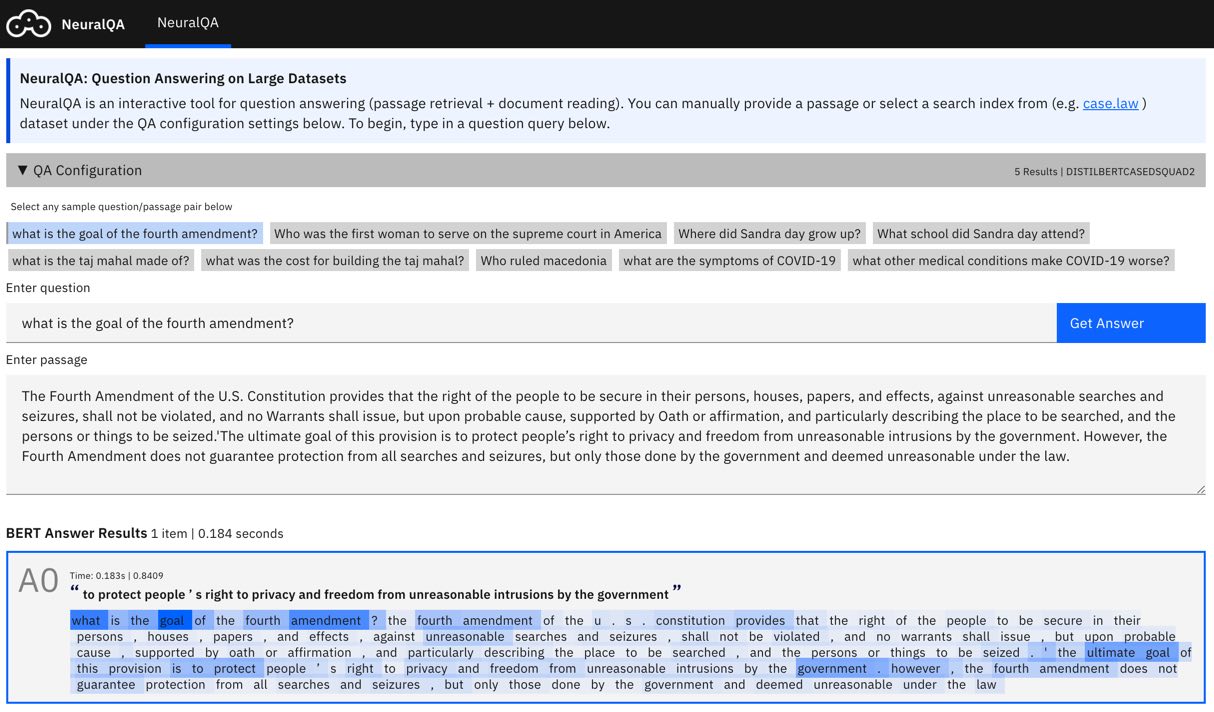
NeuralQA: A Usable Library for Question Answering on Large Datasets with BERT
NeuralQA: A Usable Library for (Extractive) Question Answering on Large Datasets with BERT Still in alpha, lots of changes anticipated. View demo on n
 184 Feb 10, 2021
184 Feb 10, 2021
Kashgari is a production-level NLP Transfer learning framework built on top of tf.keras for text-labeling and text-classification, includes Word2Vec, BERT, and GPT2 Language Embedding.
Kashgari Overview | Performance | Installation | Documentation | Contributing 🎉 🎉 🎉 We released the 2.0.0 version with TF2 Support. 🎉 🎉 🎉 If you
 2k Feb 9, 2021
2k Feb 9, 2021
:house_with_garden: Fast & easy transfer learning for NLP. Harvesting language models for the industry. Focus on Question Answering.
(Framework for Adapting Representation Models) What is it? FARM makes Transfer Learning with BERT & Co simple, fast and enterprise-ready. It's built u
 1.1k Feb 14, 2021
1.1k Feb 14, 2021
Toolkit for Machine Learning, Natural Language Processing, and Text Generation, in TensorFlow. This is part of the CASL project: http://casl-project.ai/
Texar is a toolkit aiming to support a broad set of machine learning, especially natural language processing and text generation tasks. Texar provides
2.1k Feb 17, 2021
A model library for exploring state-of-the-art deep learning topologies and techniques for optimizing Natural Language Processing neural networks
A Deep Learning NLP/NLU library by Intel® AI Lab Overview | Models | Installation | Examples | Documentation | Tutorials | Contributing NLP Architect
 2.6k Feb 18, 2021
2.6k Feb 18, 2021