135 Repositories
Python soft-robotics Libraries
Official implementation of "DSP: Dual Soft-Paste for Unsupervised Domain Adaptive Semantic Segmentation"
DSP Official implementation of "DSP: Dual Soft-Paste for Unsupervised Domain Adaptive Semantic Segmentation". Accepted by ACM Multimedia 2021. Authors
 20 Oct 24, 2022
20 Oct 24, 2022
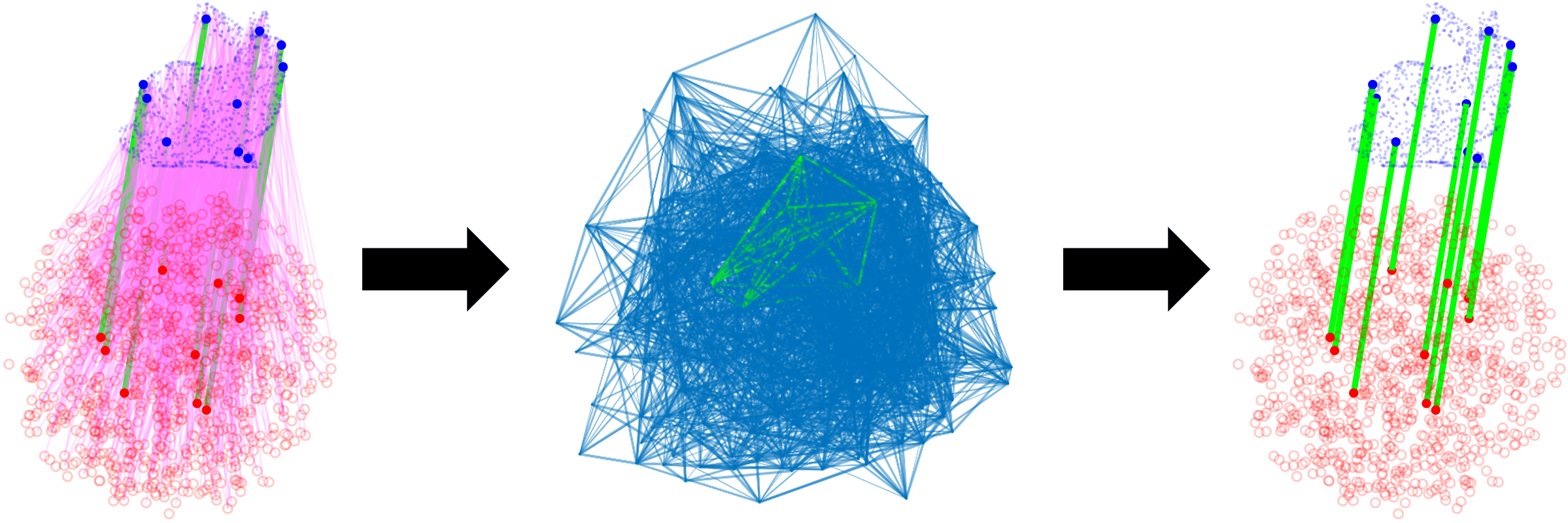
![[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design](https://github.com/eanswer/DiffHand/raw/master/demos/representative_image.jpg)
[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design
DiffHand This repository contains the implementation for the paper An End-to-End Differentiable Framework for Contact-Aware Robot Design (RSS 2021). I
 60 Jan 4, 2023
60 Jan 4, 2023

The Power of Scale for Parameter-Efficient Prompt Tuning
The Power of Scale for Parameter-Efficient Prompt Tuning Implementation of soft embeddings from https://arxiv.org/abs/2104.08691v1 using Pytorch and H
 208 Dec 30, 2022
208 Dec 30, 2022
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
 43 Nov 21, 2022
43 Nov 21, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
 49 Nov 28, 2022
49 Nov 28, 2022
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022
ElegantRL is featured with lightweight, efficient and stable, for researchers and practitioners.
Lightweight, efficient and stable implementations of deep reinforcement learning algorithms using PyTorch. 🔥
 2.5k Jan 8, 2023
2.5k Jan 8, 2023
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022

PyTorch implementation of Soft-DTW: a Differentiable Loss Function for Time-Series in CUDA
Soft DTW Loss Function for PyTorch in CUDA This is a Pytorch Implementation of Soft-DTW: a Differentiable Loss Function for Time-Series which is batch
 76 Dec 20, 2022
76 Dec 20, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
This is the dataset and code release of the OpenRooms Dataset.
This is the dataset and code release of the OpenRooms Dataset.
 95 Jan 8, 2023
95 Jan 8, 2023
Custom TensorFlow2 implementations of forward and backward computation of soft-DTW algorithm in batch mode.
Batch Soft-DTW(Dynamic Time Warping) in TensorFlow2 including forward and backward computation Custom TensorFlow2 implementations of forward and backw
 19 Aug 30, 2022
19 Aug 30, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023

JAX code for the paper "Control-Oriented Model-Based Reinforcement Learning with Implicit Differentiation"
Optimal Model Design for Reinforcement Learning This repository contains JAX code for the paper Control-Oriented Model-Based Reinforcement Learning wi
 43 Sep 28, 2022
43 Sep 28, 2022
Minimal implementation of PAWS (https://arxiv.org/abs/2104.13963) in TensorFlow.
PAWS-TF 🐾 Implementation of Semi-Supervised Learning of Visual Features by Non-Parametrically Predicting View Assignments with Support Samples (PAWS)
 43 Jan 8, 2023
43 Jan 8, 2023
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
44 Jan 6, 2023
Python sample codes for robotics algorithms.
PythonRobotics Python codes for robotics algorithm. Table of Contents What is this? Requirements Documentation How to use Localization Extended Kalman
 17.2k Jan 1, 2023
17.2k Jan 1, 2023

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Bucatini: a soft PIPE PHY for FPGA SerDes
Bucatini: a soft PIPE PHY for FPGA SerDes Bucatini is a noodly gateware layer capable of transforming an FPGA SerDes into a PIPE PHY, allowing you to
 28 Dec 2, 2022
28 Dec 2, 2022
Proto-RL: Reinforcement Learning with Prototypical Representations
Proto-RL: Reinforcement Learning with Prototypical Representations This is a PyTorch implementation of Proto-RL from Reinforcement Learning with Proto
 74 Dec 6, 2022
74 Dec 6, 2022
Official PyTorch implementation of Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yu
 63 Jan 3, 2023
63 Jan 3, 2023

Spatial Action Maps for Mobile Manipulation (RSS 2020)
spatial-action-maps Update: Please see our new spatial-intention-maps repository, which extends this work to multi-agent settings. It contains many ne
 27 Nov 30, 2022
27 Nov 30, 2022

Spatial Intention Maps for Multi-Agent Mobile Manipulation (ICRA 2021)
spatial-intention-maps This code release accompanies the following paper: Spatial Intention Maps for Multi-Agent Mobile Manipulation Jimmy Wu, Xingyua
70 Jan 2, 2023

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
 4.7k Jan 1, 2023
4.7k Jan 1, 2023

Dogs classification with Deep Metric Learning using some popular losses
Tsinghua Dogs classification with Deep Metric Learning 1. Introduction Tsinghua Dogs dataset Tsinghua Dogs is a fine-grained classification dataset fo
 45 Nov 9, 2022
45 Nov 9, 2022

SSL_SLAM2: Lightweight 3-D Localization and Mapping for Solid-State LiDAR (mapping and localization separated) ICRA 2021
SSL_SLAM2 Lightweight 3-D Localization and Mapping for Solid-State LiDAR (Intel Realsense L515 as an example) This repo is an extension work of SSL_SL
 1.3k Jan 8, 2023
1.3k Jan 8, 2023

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022
Safe Bayesian Optimization
SafeOpt - Safe Bayesian Optimization This code implements an adapted version of the safe, Bayesian optimization algorithm, SafeOpt [1], [2]. It also p
 111 Dec 11, 2022
111 Dec 11, 2022

Train robotic agents to learn pick and place with deep learning for vision-based manipulation in PyBullet.
Ravens is a collection of simulated tasks in PyBullet for learning vision-based robotic manipulation, with emphasis on pick and place. It features a Gym-like API with 10 tabletop rearrangement tasks, each with (i) a scripted oracle that provides expert demonstrations (for imitation learning), and (ii) reward functions that provide partial credit (for reinforcement learning).
 367 Jan 9, 2023
367 Jan 9, 2023
PaddleRobotics is an open-source algorithm library for robots based on Paddle, including open-source parts such as human-robot interaction, complex motion control, environment perception, SLAM positioning, and navigation.
简体中文 | English PaddleRobotics paddleRobotics是基于paddle的机器人开源算法库集,包括人机交互、复杂运动控制、环境感知、slam定位导航等开源算法部分。 人机交互 主动多模交互技术TFVT-HRI 主动多模交互技术是通过视觉、语音、触摸传感器等输入机器人
 185 Dec 26, 2022
185 Dec 26, 2022
An open source robotics benchmark for meta- and multi-task reinforcement learning
Meta-World Meta-World is an open-source simulated benchmark for meta-reinforcement learning and multi-task learning consisting of 50 distinct robotic
 823 Jan 6, 2023
823 Jan 6, 2023