226 Repositories
Python robotics-toolbox Libraries
PyPOTS - A Python Toolbox for Data Mining on Partially-Observed Time Series
A python toolbox/library for data mining on partially-observed time series, supporting tasks of forecasting/imputation/classification/clustering on incomplete multivariate time series with missing values.
 179 Dec 31, 2022
179 Dec 31, 2022
PyTorch-centric library for evaluating and enhancing the robustness of AI technologies
Responsible AI Toolbox A library that provides high-quality, PyTorch-centric tools for evaluating and enhancing both the robustness and the explainabi
 24 Dec 22, 2022
24 Dec 22, 2022

Code for Ditto: Building Digital Twins of Articulated Objects from Interaction
Ditto: Building Digital Twins of Articulated Objects from Interaction Zhenyu Jiang, Cheng-Chun Hsu, Yuke Zhu CVPR 2022, Oral Project | arxiv News 2022
 78 Dec 22, 2022
78 Dec 22, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023

SafePicking: Learning Safe Object Extraction via Object-Level Mapping, ICRA 2022
SafePicking Learning Safe Object Extraction via Object-Level Mapping Kentaro Wad
 49 Oct 24, 2022
49 Oct 24, 2022

UMPNet: Universal Manipulation Policy Network for Articulated Objects
UMPNet: Universal Manipulation Policy Network for Articulated Objects Zhenjia Xu, Zhanpeng He, Shuran Song Columbia University Robotics and Automation
 33 Dec 3, 2022
33 Dec 3, 2022
A Learning-based Camera Calibration Toolbox
Learning-based Camera Calibration A Learning-based Camera Calibration Toolbox Paper The pdf file can be found here. @misc{zhang2022learningbased,
 14 Dec 21, 2022
14 Dec 21, 2022
Ghost-toolbox - Ghost's official Discord raid tool
Ghost Toolbox Ghost's official Discord raid tool. How to use Clone this repo int
 10 Oct 31, 2022
10 Oct 31, 2022
Axel - 3D printed robotic hands and they controll with Raspberry Pi and Arduino combo
Axel It's our graduation project about 3D printed robotic hands and they control
 0 Feb 14, 2022
0 Feb 14, 2022

Optimal Transport Tools (OTT), A toolbox for all things Wasserstein.
Optimal Transport Tools (OTT), A toolbox for all things Wasserstein. See full documentation for detailed info on the toolbox. The goal of OTT is to pr
 255 Dec 26, 2022
255 Dec 26, 2022
traiNNer is an open source image and video restoration (super-resolution, denoising, deblurring and others) and image to image translation toolbox based on PyTorch.
traiNNer traiNNer is an open source image and video restoration (super-resolution, denoising, deblurring and others) and image to image translation to
 202 Jan 4, 2023
202 Jan 4, 2023
A Python toolbox to churn out organic alkalinity calculations with minimal brain engagement.
Organic Alkalinity Sausage Machine A Python toolbox to churn out organic alkalinity calculations with minimal brain engagement. Getting started To mak
 1 Feb 1, 2022
1 Feb 1, 2022
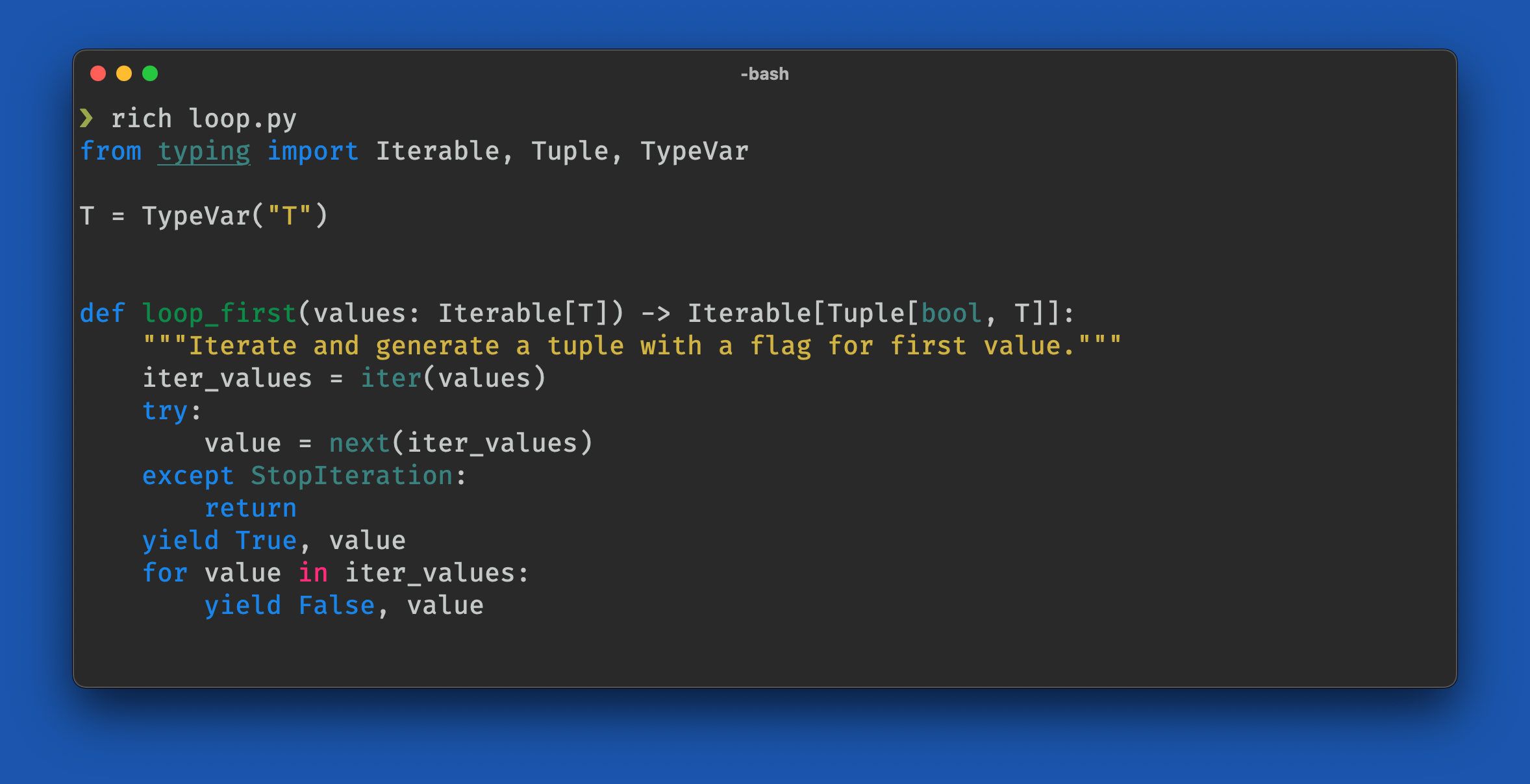
Rich-cli is a command line toolbox for fancy output in the terminal
Rich CLI Rich-cli is a command line toolbox for fancy output in the terminal, built with Rich. Rich-cli can syntax highlight a large number of file ty
 2.5k Jan 2, 2023
2.5k Jan 2, 2023
A large-scale benchmark for co-optimizing the design and control of soft robots, as seen in NeurIPS 2021.
Evolution Gym A large-scale benchmark for co-optimizing the design and control of soft robots. As seen in Evolution Gym: A Large-Scale Benchmark for E
 121 Dec 14, 2022
121 Dec 14, 2022

This repository contains a toolkit for collecting, labeling and tracking object keypoints
This repository contains a toolkit for collecting, labeling and tracking object keypoints. Object keypoints are semantic points in an object's coordinate frame.
 13 Dec 12, 2022
13 Dec 12, 2022
DROPO: Sim-to-Real Transfer with Offline Domain Randomization
DROPO: Sim-to-Real Transfer with Offline Domain Randomization Gabriele Tiboni, Karol Arndt, Ville Kyrki. This repository contains the code for the pap
 8 Dec 19, 2022
8 Dec 19, 2022

Instantaneous Motion Generation for Robots and Machines.
Ruckig Instantaneous Motion Generation for Robots and Machines. Ruckig generates trajectories on-the-fly, allowing robots and machines to react instan
 374 Dec 23, 2022
374 Dec 23, 2022

Plot toolbox based on Matplotlib, simple and elegant.
Elegant-Plot Plot toolbox based on Matplotlib, simple and elegant. 绘制效果 绘制过程 数据准备 每种图标类型的目录下有data.csv文件,依据样例数据填入自己的数据。
 3 Jul 15, 2022
3 Jul 15, 2022
UMich 500-Level Mobile Robotics Course
MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, lecture notes, and example codes, see
 393 Dec 29, 2022
393 Dec 29, 2022
Computational Pathology Toolbox developed by TIA Centre, University of Warwick.
TIA Toolbox Computational Pathology Toolbox developed at the TIA Centre Getting Started All Users This package is for those interested in digital path
 156 Jan 8, 2023
156 Jan 8, 2023
A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
Monte Carlo Simulation to the Paper A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
 0 Dec 6, 2021
0 Dec 6, 2021
This repository contains the exercices for the robotics class at Supaero, 2022.
Supaero robotics, 2022 This repository contains the exercices for the robotics class at Supaero, 2022. The exercices are organized by notebook. Each n
 5 Aug 1, 2022
5 Aug 1, 2022

ObjectDrawer-ToolBox: a graphical image annotation tool to generate ground plane masks for a 3D object reconstruction system
ObjectDrawer-ToolBox is a graphical image annotation tool to generate ground plane masks for a 3D object reconstruction system, Object Drawer.
 77 Jan 5, 2023
77 Jan 5, 2023
Course on computational design, non-linear optimization, and dynamics of soft systems at UIUC.
Computational Design and Dynamics of Soft Systems · This is a repository that contains the source code for generating the lecture notes, handouts, exe
 4 Jul 21, 2022
4 Jul 21, 2022

K Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching (To appear in RA-L 2022)
KCP The official implementation of KCP: k Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching, accepted for p
 109 Dec 14, 2022
109 Dec 14, 2022

This is RFA-Toolbox, a simple and easy-to-use library that allows you to optimize your neural network architectures using receptive field analysis (RFA) and create graph visualizations of your architecture.
ReceptiveFieldAnalysisToolbox This is RFA-Toolbox, a simple and easy-to-use library that allows you to optimize your neural network architectures usin
 84 Nov 23, 2022
84 Nov 23, 2022

Scenarios, tutorials and demos for Autonomous Driving
The Autonomous Driving Cookbook (Preview) NOTE: This project is developed and being maintained by Project Road Runner at Microsoft Garage. This is cur
 2.1k Jan 2, 2023
2.1k Jan 2, 2023
Python library to interact with Move Hub / PoweredUp Hubs
Python library to interact with Move Hub / PoweredUp Hubs Move Hub is central controller block of LEGO® Boost Robotics Set. In fact, Move Hub is just
 499 Jan 4, 2023
499 Jan 4, 2023

This is a super simple visualization toolbox (script) for transformer attention visualization ✌
Trans_attention_vis This is a super simple visualization toolbox (script) for transformer attention visualization ✌ 1. How to prepare your attention m
 3 Jul 9, 2022
3 Jul 9, 2022
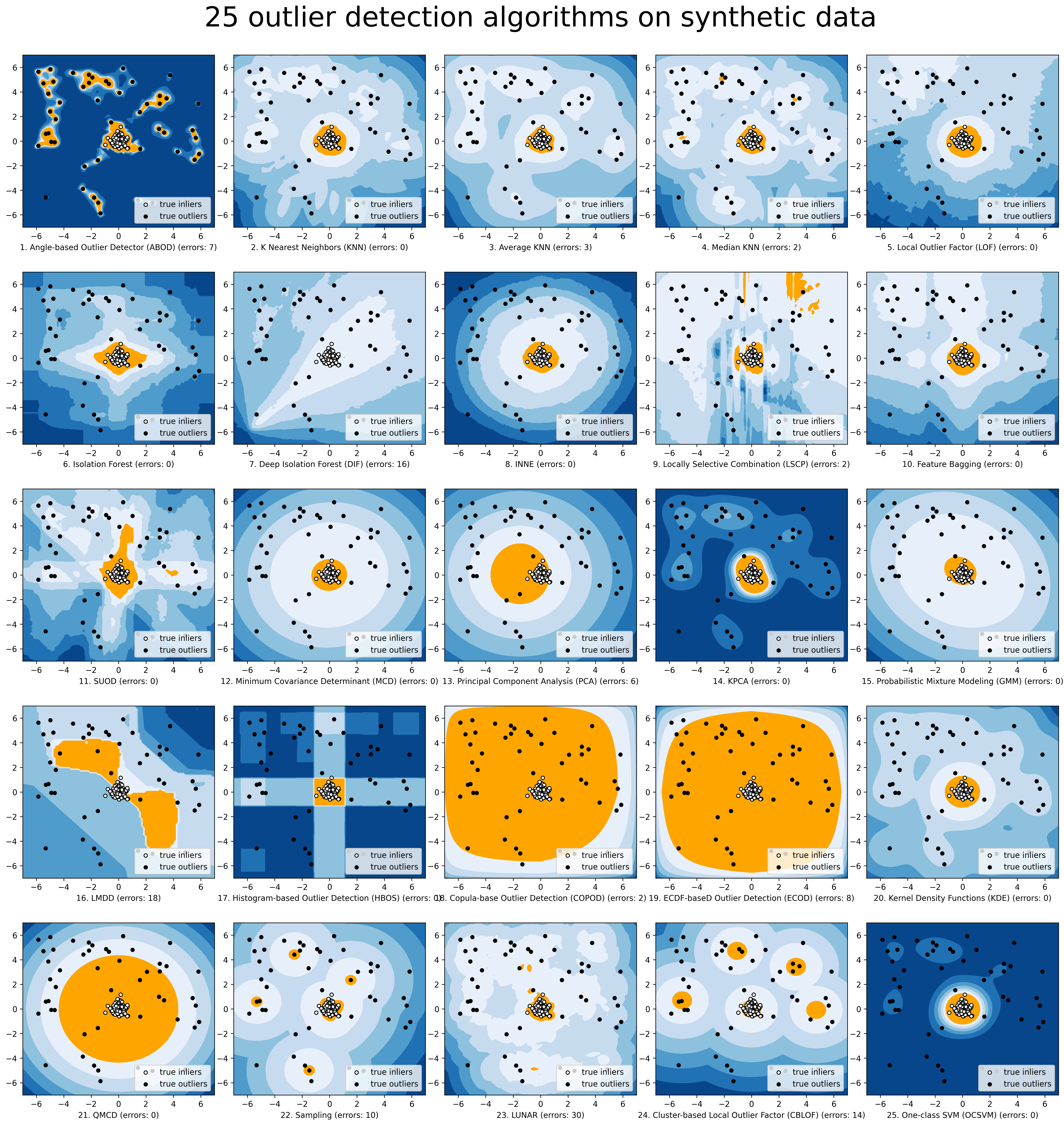
(JMLR' 19) A Python Toolbox for Scalable Outlier Detection (Anomaly Detection)
Python Outlier Detection (PyOD) Deployment & Documentation & Stats & License PyOD is a comprehensive and scalable Python toolkit for detecting outlyin
 6.6k Jan 5, 2023
6.6k Jan 5, 2023
Robotics environments
Robotics environments Details and documentation on these robotics environments are available in OpenAI's blog post and the accompanying technical repo
 121 Dec 28, 2022
121 Dec 28, 2022
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning Website • About • Installation • Using OpenDR
 304 Dec 28, 2022
304 Dec 28, 2022

An Inverse Kinematics library aiming performance and modularity
IKPy Demo Live demos of what IKPy can do (click on the image below to see the video): Also, a presentation of IKPy: Presentation. Features With IKPy,
 481 Jan 2, 2023
481 Jan 2, 2023
The Generic Manipulation Driver Package - Implements a ROS Interface over the robotics toolbox for Python
Armer Driver Armer aims to provide an interface layer between the hardware drivers of a robotic arm giving the user control in several ways: Joint vel
 13 Nov 26, 2022
13 Nov 26, 2022

A lightweight face-recognition toolbox and pipeline based on tensorflow-lite
FaceIDLight 📘 Description A lightweight face-recognition toolbox and pipeline based on tensorflow-lite with MTCNN-Face-Detection and ArcFace-Face-Rec
 16 Dec 7, 2022
16 Dec 7, 2022
Advbox is a toolbox to generate adversarial examples that fool neural networks in PaddlePaddle、PyTorch、Caffe2、MxNet、Keras、TensorFlow and Advbox can benchmark the robustness of machine learning models.
Advbox is a toolbox to generate adversarial examples that fool neural networks in PaddlePaddle、PyTorch、Caffe2、MxNet、Keras、TensorFlow and Advbox can benchmark the robustness of machine learning models. Advbox give a command line tool to generate adversarial examples with Zero-Coding.
 1.3k Dec 25, 2022
1.3k Dec 25, 2022
A PyTorch-based Semi-Supervised Learning (SSL) Codebase for Pixel-wise (Pixel) Vision Tasks
PixelSSL is a PyTorch-based semi-supervised learning (SSL) codebase for pixel-wise (Pixel) vision tasks. The purpose of this project is to promote the
 255 Dec 11, 2022
255 Dec 11, 2022

Mixup for Supervision, Semi- and Self-Supervision Learning Toolbox and Benchmark
OpenSelfSup News Downstream tasks now support more methods(Mask RCNN-FPN, RetinaNet, Keypoints RCNN) and more datasets(Cityscapes). 'GaussianBlur' is
 332 Jan 3, 2023
332 Jan 3, 2023

NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser.
NiceGUI NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser. You can create buttons, dialogs, markdown, 3D scences
 419 Jan 9, 2023
419 Jan 9, 2023

Pypot ⚙️ A Python library for Dynamixel motor control
Pypot ⚙️ A Python library for Dynamixel motor control Pypot is a cross-platform Python library making it easy and fast to control custom robots based
 238 Nov 21, 2022
238 Nov 21, 2022
🔀 Visual Room Rearrangement
AI2-THOR Rearrangement Challenge Welcome to the 2021 AI2-THOR Rearrangement Challenge hosted at the CVPR'21 Embodied-AI Workshop. The goal of this cha
 55 Dec 22, 2022
55 Dec 22, 2022

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022
ONNX Command-Line Toolbox
ONNX Command Line Toolbox Aims to improve your experience of investigating ONNX models. Use it like onnx infershape /path/to/model.onnx. (See the usag
 23 Nov 13, 2022
23 Nov 13, 2022
An open-source systems and controls toolbox for Python3
harold A control systems package for Python=3.6. Introduction This package is written with the ambition of providing a full-fledged control systems s
 157 Dec 5, 2022
157 Dec 5, 2022

The code repository for "PyCIL: A Python Toolbox for Class-Incremental Learning" in PyTorch.
PyCIL: A Python Toolbox for Class-Incremental Learning Introduction • Methods Reproduced • Reproduced Results • How To Use • License • Acknowledgement
 258 Dec 31, 2022
258 Dec 31, 2022

This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
 17 Nov 3, 2022
17 Nov 3, 2022
🗃️ Fileio-cli wrapper for fileioapi.py with fire.py, inspiration DOS
🗃️ File.io File.io simply upload a file, share the link, and after it is downloaded, the file is completely deleted. An API wrapper for the file.io w
 2 May 12, 2022
2 May 12, 2022

OBBDetection: an oriented object detection toolbox modified from MMdetection
OBBDetection note: If you have questions or good suggestions, feel free to propose issues and contact me. introduction OBBDetection is an oriented obj
 3 Nov 11, 2022
3 Nov 11, 2022
Robot Hacking Manual (RHM). From robotics to cybersecurity. Papers, notes and writeups from a journey into robot cybersecurity.
RHM: Robot Hacking Manual Download in PDF RHM v0.4 ┃ Read online The Robot Hacking Manual (RHM) is an introductory series about cybersecurity for robo
 233 Dec 30, 2022
233 Dec 30, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
AdelaiDet is an open source toolbox for multiple instance-level detection and recognition tasks.
AdelaiDet is an open source toolbox for multiple instance-level detection and recognition tasks.
 3k Jan 2, 2023
3k Jan 2, 2023
Jiminy, fast and portable Python/C++ simulator of poly-articulated systems with OpenAI Gym interface for reinforcement learning.
Jiminy is a fast and portable cross-platform open-source simulator for poly-articulated systems. It was built with two ideas in mind: provide a fast y
 122 Dec 29, 2022
122 Dec 29, 2022
Mmdetection3d Noted - MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch
 13 Jan 6, 2023
13 Jan 6, 2023
A simple small scale electric car was build which can be driven by remote control and features a fully autonomous parking procedure.
personal-autonomous-parking-car-raspberry A simple electric car model was build using Raspbery pi. The car has remote control and autonomous operation
 2 Jan 26, 2022
2 Jan 26, 2022

Samples for robotics, node, python, and bash
RaspberryPi Robot Project Technologies: Render: intent Currently designed to act as programmable sentry.
 1 May 31, 2022
1 May 31, 2022

CALVIN - A benchmark for Language-Conditioned Policy Learning for Long-Horizon Robot Manipulation Tasks
CALVIN CALVIN - A benchmark for Language-Conditioned Policy Learning for Long-Horizon Robot Manipulation Tasks Oier Mees, Lukas Hermann, Erick Rosete,
 107 Dec 26, 2022
107 Dec 26, 2022
Open Source Light Field Toolbox for Super-Resolution
BasicLFSR BasicLFSR is an open-source and easy-to-use Light Field (LF) image Super-Ressolution (SR) toolbox based on PyTorch, including a collection o
 50 Nov 18, 2022
50 Nov 18, 2022
Add built-in support for quaternions to numpy
Quaternions in numpy This Python module adds a quaternion dtype to NumPy. The code was originally based on code by Martin Ling (which he wrote with he
 531 Dec 28, 2022
531 Dec 28, 2022
A Fast, Easy, and User Friendly way to control Robotics Actuators.
T-Motor Controller A Fast, Easy, and User Friendly way to control Robotics Actuators. View Demo · Report Bug · Request Feature Table of Contents About
 26 Aug 23, 2022
26 Aug 23, 2022
OpenMMLab 3D Human Parametric Model Toolbox and Benchmark
Introduction English | 简体中文 MMHuman3D is an open source PyTorch-based codebase for the use of 3D human parametric models in computer vision and comput
 782 Jan 4, 2023
782 Jan 4, 2023
A PyTorch Toolbox for Face Recognition
FaceX-Zoo FaceX-Zoo is a PyTorch toolbox for face recognition. It provides a training module with various supervisory heads and backbones towards stat
 1.1k Dec 3, 2021
1.1k Dec 3, 2021

Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation
🤖 RoboCop 🤖 Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation Made by Clemente Donoso, 📍 Chile 🇨🇱 RoboCop Lateral Fron
 2 Jan 4, 2022
2 Jan 4, 2022
Structured Edge Detection Toolbox
################################################################### # # # Structure
 779 Jan 2, 2023
779 Jan 2, 2023
Toolbox to analyze temporal context invariance of deep neural networks
PyTCI A toolbox that estimates the integration window of a sensory response using the "Temporal Context Invariance" paradigm (TCI). The TCI method Int
 4 Oct 23, 2022
4 Oct 23, 2022
✨✨✨An awesome open source toolbox for stereo matching.
OpenStereo This is an awesome open source toolbox for stereo matching. Supported Methods: BM SGM(T-PAMI'07) GCNet(ICCV'17) PSMNet(CVPR'18) StereoNet(E
 6 Nov 4, 2022
6 Nov 4, 2022
2021 National Underwater Robotics Vision Optics
2021-National-Underwater-Robotics-Vision-Optics 2021年全国水下机器人算法大赛-光学赛道-B榜精度第18名 (Kilian_Di的团队:A榜map@50:95 56.36 B榜map@50:95 56.7) 2021年全国水下机器人算法大赛-声学赛道
 9 Nov 4, 2022
9 Nov 4, 2022
Bonnet: An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics.
Bonnet: An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics. By Andres Milioto @ University of Bonn. (for the new P
 314 Dec 30, 2022
314 Dec 30, 2022
An Unbiased Learning To Rank Algorithms (ULTRA) toolbox
Unbiased Learning to Rank Algorithms (ULTRA) This is an Unbiased Learning To Rank Algorithms (ULTRA) toolbox, which provides a codebase for experiment
 3 Nov 18, 2022
3 Nov 18, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
3.2k Dec 31, 2022
Robot Servers and Server Manager software for robo-gym
robo-gym-server-modules Robot Servers and Server Manager software for robo-gym. For info on how to use this package please visit the robo-gym website
 4 Aug 16, 2021
4 Aug 16, 2021

Towards Multi-Camera 3D Human Pose Estimation in Wild Environment
PanopticStudio Toolbox This repository has a toolbox to download, process, and visualize the Panoptic Studio (Panoptic) data. Note: Sep-21-2020: Curre
 335 Jan 9, 2023
335 Jan 9, 2023

Training code and evaluation benchmarks for the "Self-Supervised Policy Adaptation during Deployment" paper.
Self-Supervised Policy Adaptation during Deployment PyTorch implementation of PAD and evaluation benchmarks from Self-Supervised Policy Adaptation dur
 101 Nov 1, 2022
101 Nov 1, 2022

Final project for ENGG 5402 Advanced Robotics in CUHK
Final project Final project Update Foundations Ubuntu virtual machine Ubuntu How to use Github to keep tracking the change of code version? Docker Set
 8 Aug 1, 2022
8 Aug 1, 2022
OpenMMLab Text Detection, Recognition and Understanding Toolbox
Introduction English | 简体中文 MMOCR is an open-source toolbox based on PyTorch and mmdetection for text detection, text recognition, and the correspondi
3k Jan 7, 2023
OpenMMLab Video Perception Toolbox. It supports Video Object Detection (VID), Multiple Object Tracking (MOT), Single Object Tracking (SOT), Video Instance Segmentation (VIS) with a unified framework.
English | 简体中文 Documentation: https://mmtracking.readthedocs.io/ Introduction MMTracking is an open source video perception toolbox based on PyTorch.
2.7k Jan 8, 2023
OpenMMLab Image Classification Toolbox and Benchmark
Introduction English | 简体中文 MMClassification is an open source image classification toolbox based on PyTorch. It is a part of the OpenMMLab project. D
1.8k Jan 3, 2023
An optimization and data collection toolbox for convenient and fast prototyping of computationally expensive models.
An optimization and data collection toolbox for convenient and fast prototyping of computationally expensive models. Hyperactive: is very easy to lear
 422 Jan 4, 2023
422 Jan 4, 2023
A high-performance topological machine learning toolbox in Python
giotto-tda is a high-performance topological machine learning toolbox in Python built on top of scikit-learn and is distributed under the G
 632 Dec 29, 2022
632 Dec 29, 2022
mmfewshot is an open source few shot learning toolbox based on PyTorch
OpenMMLab FewShot Learning Toolbox and Benchmark
514 Dec 28, 2022

A Python implementation of the Robotics Toolbox for MATLAB
Robotics Toolbox for Python A Python implementation of the Robotics Toolbox for MATLAB® GitHub repository Documentation Wiki (examples and details) Sy
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and motion planning
pybullet-planning (previously ss-pybullet) A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and
 260 Dec 27, 2022
260 Dec 27, 2022
PyTorch Connectomics: segmentation toolbox for EM connectomics
Introduction The field of connectomics aims to reconstruct the wiring diagram of the brain by mapping the neural connections at the level of individua
 132 Dec 26, 2022
132 Dec 26, 2022

Knowledge Distillation Toolbox for Semantic Segmentation
SegDistill: Toolbox for Knowledge Distillation on Semantic Segmentation Networks This repo contains the supported code and configuration files for Seg
 9 Dec 12, 2022
9 Dec 12, 2022
A Python toolbox to create adversarial examples that fool neural networks in PyTorch, TensorFlow, and JAX
Foolbox Native: Fast adversarial attacks to benchmark the robustness of machine learning models in PyTorch, TensorFlow, and JAX Foolbox is a Python li
 2.4k Dec 25, 2022
2.4k Dec 25, 2022
Libraries, tools and tasks created and used at DeepMind Robotics.
dm_robotics: Libraries, tools, and tasks created and used for Robotics research at DeepMind. Package overview Package Summary Transformations Rigid bo
 273 Jan 6, 2023
273 Jan 6, 2023
An example project which contains the Unity components necessary to complete Navigation2's SLAM tutorial with a Turtlebot3, using a custom Unity environment in place of Gazebo.
Navigation 2 SLAM Example This example provides a Unity Project and a colcon workspace that, when used together, allows a user to substitute Unity as
 183 Jan 4, 2023
183 Jan 4, 2023
An open source object detection toolbox based on PyTorch
MMDetection is an open source object detection toolbox based on PyTorch. It is a part of the OpenMMLab project.
 24 Dec 28, 2022
24 Dec 28, 2022

A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions
A distributed, plug-n-play algorithm for multi-robot applications with a priori non-computable objective functions Kapoutsis, A.C., Chatzichristofis,
 5 Oct 15, 2022
5 Oct 15, 2022
Code base for reproducing results of I.Schubert, D.Driess, O.Oguz, and M.Toussaint: Learning to Execute: Efficient Learning of Universal Plan-Conditioned Policies in Robotics. NeurIPS (2021)
Learning to Execute (L2E) Official code base for completely reproducing all results reported in I.Schubert, D.Driess, O.Oguz, and M.Toussaint: Learnin
 3 May 18, 2022
3 May 18, 2022
![[CoRL 2021] A robotics benchmark for cross-embodiment imitation.](https://github.com/kevinzakka/x-magical/raw/main/images/gripper-sweep.gif)
[CoRL 2021] A robotics benchmark for cross-embodiment imitation.
x-magical x-magical is a benchmark extension of MAGICAL specifically geared towards cross-embodiment imitation. The tasks still provide the Demo/Test
 36 Nov 26, 2022
36 Nov 26, 2022
Python package for agilex robotics mobile base platform
This is Python API for Agilex Robotics Mobile base This is a python API for Can communication with Agilex Robotics Mobile base and controlling it. Sup
 7 Sep 6, 2022
7 Sep 6, 2022
MMFlow is an open source optical flow toolbox based on PyTorch
Documentation: https://mmflow.readthedocs.io/ Introduction English | 简体中文 MMFlow is an open source optical flow toolbox based on PyTorch. It is a part
688 Jan 6, 2023
ObsPy: A Python Toolbox for seismology/seismological observatories.
ObsPy is an open-source project dedicated to provide a Python framework for processing seismological data. It provides parsers for common file formats
 979 Jan 7, 2023
979 Jan 7, 2023

XAI - An eXplainability toolbox for machine learning
XAI - An eXplainability toolbox for machine learning XAI is a Machine Learning library that is designed with AI explainability in its core. XAI contai
 875 Dec 27, 2022
875 Dec 27, 2022

A toolbox to iNNvestigate neural networks' predictions!
iNNvestigate neural networks! Table of contents Introduction Installation Usage and Examples More documentation Contributing Releases Introduction In
 1.1k Jan 5, 2023
1.1k Jan 5, 2023

This code is a toolbox that uses Torch library for training and evaluating the ERFNet architecture for semantic segmentation.
ERFNet This code is a toolbox that uses Torch library for training and evaluating the ERFNet architecture for semantic segmentation. NEW!! New PyTorch
 104 Jan 5, 2023
104 Jan 5, 2023
PyTorch Implementations for DeeplabV3 and PSPNet
Pytorch-segmentation-toolbox DOC Pytorch code for semantic segmentation. This is a minimal code to run PSPnet and Deeplabv3 on Cityscape dataset. Shor
 746 Dec 15, 2022
746 Dec 15, 2022
A graph adversarial learning toolbox based on PyTorch and DGL.
GraphWar: Arms Race in Graph Adversarial Learning NOTE: GraphWar is still in the early stages and the API will likely continue to change. 🚀 Installat
 54 Jan 5, 2023
54 Jan 5, 2023

Gym environments used in the paper: "Developmental Reinforcement Learning of Control Policy of a Quadcopter UAV with Thrust Vectoring Rotors"
gym_multirotor Gym to train reinforcement learning agents on UAV platforms Quadrotor Tiltrotor Requirements This package has been tested on Ubuntu 18.
 19 Dec 29, 2022
19 Dec 29, 2022