280 Repositories
Python robotics-simulation Libraries
Sionna: An Open-Source Library for Next-Generation Physical Layer Research
Sionna: An Open-Source Library for Next-Generation Physical Layer Research Sionna™ is an open-source Python library for link-level simulations of digi
 313 Dec 22, 2022
313 Dec 22, 2022

Simple renderer for use with MuJoCo (=2.1.2) Python Bindings.
Viewer for MuJoCo in Python Interactive renderer to use with the official Python bindings for MuJoCo. Starting with version 2.1.2, MuJoCo comes with n
 62 Dec 30, 2022
62 Dec 30, 2022
Codes of CVPR2022 paper: Fixing Malfunctional Objects With Learned Physical Simulation and Functional Prediction
Fixing Malfunctional Objects With Learned Physical Simulation and Functional Prediction Figure 1. Teaser. Introduction This paper studies the problem
 32 Dec 29, 2022
32 Dec 29, 2022
ICON: Implicit Clothed humans Obtained from Normals (CVPR 2022)
ICON: Implicit Clothed humans Obtained from Normals Yuliang Xiu · Jinlong Yang · Dimitrios Tzionas · Michael J. Black CVPR 2022 News 🚩 [2022/04/26] H
 1.1k Jan 4, 2023
1.1k Jan 4, 2023

Code for Ditto: Building Digital Twins of Articulated Objects from Interaction
Ditto: Building Digital Twins of Articulated Objects from Interaction Zhenyu Jiang, Cheng-Chun Hsu, Yuke Zhu CVPR 2022, Oral Project | arxiv News 2022
 78 Dec 22, 2022
78 Dec 22, 2022
Official Repository for Machine Learning class - Physics Without Frontiers 2021
PWF 2021 Física Sin Fronteras es un proyecto del Centro Internacional de Física Teórica (ICTP) en Trieste Italia. El ICTP es un centro dedicado a fome
 36 Aug 6, 2022
36 Aug 6, 2022

Simulation environments for the CrazyFlie quadrotor: Used for Reinforcement Learning and Sim-to-Real Transfer
Phoenix-Drone-Simulation An OpenAI Gym environment based on PyBullet for learning to control the CrazyFlie quadrotor: Can be used for Reinforcement Le
 8 Dec 7, 2022
8 Dec 7, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023
👨💻 run nanosaur in simulation with Gazebo/Ingnition
🦕 👨💻 nanosaur_gazebo nanosaur The smallest NVIDIA Jetson dinosaur robot, open-source, fully 3D printable, based on ROS2 & Isaac ROS. Designed & ma
 9 Jul 19, 2022
9 Jul 19, 2022

graphical orbitational simulation of solar system planets with real values and physics implemented so you get a nice elliptical orbits. you can change timestamp value or scale from source code idc.
solarSystemOrbitalSimulation graphical orbitational simulation of solar system planets with real values and physics implemented so you get a nice elli
 3 Mar 3, 2022
3 Mar 3, 2022

A python bot to move your mouse every few seconds to appear active on Skype, Teams or Zoom as you go AFK. 🐭 🤖
PyMouseBot If you're from GT and annoyed with SGVPN idle timeouts while working on development laptop, You might find this useful. A python cli bot to
 6 Oct 24, 2022
6 Oct 24, 2022

SafePicking: Learning Safe Object Extraction via Object-Level Mapping, ICRA 2022
SafePicking Learning Safe Object Extraction via Object-Level Mapping Kentaro Wad
 49 Oct 24, 2022
49 Oct 24, 2022
Source code to accompany Defunctland's video "FASTPASS: A Complicated Legacy"
Shapeland Simulator Source code to accompany Defunctland's video "FASTPASS: A Complicated Legacy" Download the video at https://www.youtube.com/watch?
 70 Dec 14, 2022
70 Dec 14, 2022
The zero player Darwinism simulation game as described by Conway (demonstrates Turing Completeness)
Conway's Game of Life The zero player Darwinism simulation game as described by Conway (demonstrates Turing Completeness). I created this script after
 1 Feb 13, 2022
1 Feb 13, 2022

UMPNet: Universal Manipulation Policy Network for Articulated Objects
UMPNet: Universal Manipulation Policy Network for Articulated Objects Zhenjia Xu, Zhanpeng He, Shuran Song Columbia University Robotics and Automation
 33 Dec 3, 2022
33 Dec 3, 2022
Ontologysim: a Owlready2 library for applied production simulation
Ontologysim: a Owlready2 library for applied production simulation Ontologysim is an open-source deep production simulation framework, with an emphasi
 10 Nov 30, 2022
10 Nov 30, 2022
Differentiable Simulation of Soft Multi-body Systems
Differentiable Simulation of Soft Multi-body Systems Yi-Ling Qiao, Junbang Liang, Vladlen Koltun, Ming C. Lin [Paper] [Code] Updates The C++ backend s
 26 Dec 23, 2022
26 Dec 23, 2022
A few of my adventures with Devito.
Devito-playbox A few of my adventures with Devito. This repository contains a few notebooks and scripts that will lead me in the road of learning this
 1 Feb 8, 2022
1 Feb 8, 2022
Axel - 3D printed robotic hands and they controll with Raspberry Pi and Arduino combo
Axel It's our graduation project about 3D printed robotic hands and they control
 0 Feb 14, 2022
0 Feb 14, 2022

WormMovementSimulation - 3D Simulation of Worm Body Movement with Neurons attached to its body
Generate 3D Locomotion Data This module is intended to create 2D video trajector
 1 Aug 9, 2022
1 Aug 9, 2022
Liquid Rocket Engine Cooling Simulation
Liquid Rocket Engine Cooling Simulation NASA CEA The implemented class calls NASA CEA via RocketCEA. INSTALL GUIDE In progress install instructions fo
 1 Jan 30, 2022
1 Jan 30, 2022
A large-scale benchmark for co-optimizing the design and control of soft robots, as seen in NeurIPS 2021.
Evolution Gym A large-scale benchmark for co-optimizing the design and control of soft robots. As seen in Evolution Gym: A Large-Scale Benchmark for E
 121 Dec 14, 2022
121 Dec 14, 2022
This is an incredible led matrix simulation using the ultimate mosaik co-simulation framework.
This project uses the mosaik co-simulation framework, developed by the brilliant developers at the high-ranked Offis institue for computer science, Oldenburg, Germany, to simulate multidimensional LED matrices.
 1 Jan 28, 2022
1 Jan 28, 2022

This repository contains a toolkit for collecting, labeling and tracking object keypoints
This repository contains a toolkit for collecting, labeling and tracking object keypoints. Object keypoints are semantic points in an object's coordinate frame.
 13 Dec 12, 2022
13 Dec 12, 2022
DROPO: Sim-to-Real Transfer with Offline Domain Randomization
DROPO: Sim-to-Real Transfer with Offline Domain Randomization Gabriele Tiboni, Karol Arndt, Ville Kyrki. This repository contains the code for the pap
 8 Dec 19, 2022
8 Dec 19, 2022
Our implementation of Gillespie's Stochastic Simulation Algorithm (SSA)
SSA Our implementation of Gillespie's Stochastic Simulation Algorithm (SSA) Requirements python =3.7 numpy pandas matplotlib pyyaml Command line usag
 1 Jan 27, 2022
1 Jan 27, 2022
solsim is the Solana complex systems simulator. It simulates behavior of dynamical systems—DeFi protocols, DAO governance, cryptocurrencies, and more—built on the Solana blockchain
solsim is the Solana complex systems simulator. It simulates behavior of dynamical systems—DeFi protocols, DAO governance, cryptocurrencies, and more—built on the Solana blockchain
 12 Jul 13, 2022
12 Jul 13, 2022

Instantaneous Motion Generation for Robots and Machines.
Ruckig Instantaneous Motion Generation for Robots and Machines. Ruckig generates trajectories on-the-fly, allowing robots and machines to react instan
 374 Dec 23, 2022
374 Dec 23, 2022
E2EDNA2 - An automated pipeline for simulation of DNA aptamers complexed with small molecules and short peptides
E2EDNA2 - An automated pipeline for simulation of DNA aptamers complexed with small molecules and short peptides
 11 Nov 8, 2022
11 Nov 8, 2022

Modeling and Simulation of Satellite Servicing Manipulators
Modeling and Simulation of Satellite Servicing Manipulators Final Project for the course ENPM662: Introduction to Robot Modeling (Fall 2021). This pro
 1 Jan 24, 2022
1 Jan 24, 2022
WATTS provides a set of Python classes that can manage simulation workflows for multiple codes where information is exchanged at a coarse level
WATTS (Workflow and Template Toolkit for Simulation) provides a set of Python classes that can manage simulation workflows for multiple codes where information is exchanged at a coarse level.
 13 Dec 23, 2022
13 Dec 23, 2022
Fixed waypoint(pose) navigation for turtlebot simulation.
Turtlebot-NavigationStack-Fixed-Waypoints fixed waypoint(pose) navigation for turtlebot simulation. Task Details Task Permformed using Navigation Stac
 1 Apr 8, 2022
1 Apr 8, 2022
Franka Emika Panda manipulator kinematics&dynamics simulation
pybullet_sim_panda Pybullet simulation environment for Franka Emika Panda Dependency pybullet, numpy, spatial_math_mini Simple example (please check s
 0 Jan 20, 2022
0 Jan 20, 2022
Simulation simplifiée du fonctionnement du protocole RIP
ProjetRIPlay v2 Simulation simplifiée du fonctionnement du protocole RIP par Eric Buonocore le 18/01/2022 Sur la base de l'exercice 5 du sujet zéro du
 2 Feb 15, 2022
2 Feb 15, 2022

MM1 and MMC Queue Simulation using python - Results and parameters in excel and csv files
implementation of MM1 and MMC Queue on randomly generated data and evaluate simulation results then compare with analytical results and draw a plot curve for them, simulate some integrals and compare results and run monte carlo algorithm with them
 1 Jan 19, 2022
1 Jan 19, 2022
UMich 500-Level Mobile Robotics Course
MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2022 University of Michigan - NA 568/EECS 568/ROB 530 For slides, lecture notes, and example codes, see
 393 Dec 29, 2022
393 Dec 29, 2022
Reimplementation of Learning Mesh-based Simulation With Graph Networks
Pytorch Implementation of Learning Mesh-based Simulation With Graph Networks This is the unofficial implementation of the approach described in the pa
 33 Dec 14, 2022
33 Dec 14, 2022
PyElastica is the Python implementation of Elastica, an open-source software for the simulation of assemblies of slender, one-dimensional structures using Cosserat Rod theory.
PyElastica PyElastica is the python implementation of Elastica: an open-source project for simulating assemblies of slender, one-dimensional structure
 105 Jan 9, 2023
105 Jan 9, 2023
A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
Monte Carlo Simulation to the Paper A High-Level Fusion Scheme for Circular Quantities published at the 20th International Conference on Advanced Robotics
 0 Dec 6, 2021
0 Dec 6, 2021
StableSims is an open-source project aimed at simulating MakerDAO's Dai stablecoin system
StableSims is an open-source project aimed at simulating MakerDAO's Dai stablecoin system, initially used for researching optimal incentive parameters for Liquidations 2.0.
 52 Nov 21, 2022
52 Nov 21, 2022
This repository contains the exercices for the robotics class at Supaero, 2022.
Supaero robotics, 2022 This repository contains the exercices for the robotics class at Supaero, 2022. The exercices are organized by notebook. Each n
 5 Aug 1, 2022
5 Aug 1, 2022
Course on computational design, non-linear optimization, and dynamics of soft systems at UIUC.
Computational Design and Dynamics of Soft Systems · This is a repository that contains the source code for generating the lecture notes, handouts, exe
 4 Jul 21, 2022
4 Jul 21, 2022

Aircraft design optimization made fast through modern automatic differentiation
Aircraft design optimization made fast through modern automatic differentiation. Plug-and-play analysis tools for aerodynamics, propulsion, structures, trajectory design, and much more.
 394 Dec 23, 2022
394 Dec 23, 2022

K Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching (To appear in RA-L 2022)
KCP The official implementation of KCP: k Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching, accepted for p
 109 Dec 14, 2022
109 Dec 14, 2022

Scenarios, tutorials and demos for Autonomous Driving
The Autonomous Driving Cookbook (Preview) NOTE: This project is developed and being maintained by Project Road Runner at Microsoft Garage. This is cur
 2.1k Jan 2, 2023
2.1k Jan 2, 2023
Python library to interact with Move Hub / PoweredUp Hubs
Python library to interact with Move Hub / PoweredUp Hubs Move Hub is central controller block of LEGO® Boost Robotics Set. In fact, Move Hub is just
 499 Jan 4, 2023
499 Jan 4, 2023

Neural network pruning for finding a sparse computational model for controlling a biological motor task.
MothPruning Scientific Overview Originally inspired by biological nervous systems, deep neural networks (DNNs) are powerful computational tools for mo
 0 Dec 14, 2022
0 Dec 14, 2022
Active Transport Analytics Model: A new strategic transport modelling and data visualization framework
{ATAM} Active Transport Analytics Model Active Transport Analytics Model (“ATAM”
 2 Dec 21, 2022
2 Dec 21, 2022
FURY - A software library for scientific visualization in Python
Free Unified Rendering in Python A software library for scientific visualization in Python. General Information • Key Features • Installation • How to
 169 Dec 21, 2022
169 Dec 21, 2022
A library for demo trading | backtest and forward test simulation
Trade Engine a library for demo trading | backtest and forward test simulation Features Limit/Market orders: you can place a Limit or Market order in
 7 Jul 2, 2022
7 Jul 2, 2022

A Simulation Environment to train Robots in Large Realistic Interactive Scenes
iGibson: A Simulation Environment to train Robots in Large Realistic Interactive Scenes iGibson is a simulation environment providing fast visual rend
 493 Jan 4, 2023
493 Jan 4, 2023
Robotics environments
Robotics environments Details and documentation on these robotics environments are available in OpenAI's blog post and the accompanying technical repo
 121 Dec 28, 2022
121 Dec 28, 2022
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning Website • About • Installation • Using OpenDR
 304 Dec 28, 2022
304 Dec 28, 2022

Simulation of self-focusing of laser beams in condensed media
What is it? Program for scientific research, which allows to simulate the phenomenon of self-focusing of different laser beams (including Gaussian, ri
 13 Dec 24, 2022
13 Dec 24, 2022

An Inverse Kinematics library aiming performance and modularity
IKPy Demo Live demos of what IKPy can do (click on the image below to see the video): Also, a presentation of IKPy: Presentation. Features With IKPy,
 481 Jan 2, 2023
481 Jan 2, 2023

Pythonic particle-based (super-droplet) warm-rain/aqueous-chemistry cloud microphysics package with box, parcel & 1D/2D prescribed-flow examples in Python, Julia and Matlab
PySDM PySDM is a package for simulating the dynamics of population of particles. It is intended to serve as a building block for simulation systems mo
 32 Oct 18, 2022
32 Oct 18, 2022
Simulate genealogical trees and genomic sequence data using population genetic models
msprime msprime is a population genetics simulator based on tskit. Msprime can simulate random ancestral histories for a sample of individuals (consis
 150 Dec 14, 2022
150 Dec 14, 2022
The Generic Manipulation Driver Package - Implements a ROS Interface over the robotics toolbox for Python
Armer Driver Armer aims to provide an interface layer between the hardware drivers of a robotic arm giving the user control in several ways: Joint vel
 13 Nov 26, 2022
13 Nov 26, 2022

🐍 Conway's Game of Life cellular automaton implemented in PyGame
Conway's Game of Life My PyGame implementation of Conway's Game of Life. This implementation involves treating all edges of the grid as stitched toget
 1 May 29, 2022
1 May 29, 2022
Imaging, analysis, and simulation software for radio interferometry
ehtim (eht-imaging) Python modules for simulating and manipulating VLBI data and producing images with regularized maximum likelihood methods. This ve
 5.2k Dec 28, 2022
5.2k Dec 28, 2022

Simulation du problème de Monty Hall avec Python et matplotlib
Le problème de Monty Hall C'est un jeu télévisé où il y a trois portes sur le plateau de jeu. Seule une de ces portes cache un trésor. Il n'y a rien d
 1 Jan 6, 2022
1 Jan 6, 2022

GAN-STEM-Conv2MultiSlice - Exploring Generative Adversarial Networks for Image-to-Image Translation in STEM Simulation
GAN-STEM-Conv2MultiSlice GAN method to help covert lower resolution STEM images generated by convolution methods to higher resolution STEM images gene
 2 Feb 10, 2021
2 Feb 10, 2021

Ghdl-interactive-sim - Interactive GHDL simulation of a VHDL adder using Python, Cocotb, and pygame
GHDL Interactive Simulation This is an interactive test bench for a simple VHDL adder. It uses GHDL to elaborate/run the simulation. It is coded in Py
 2 Aug 11, 2022
2 Aug 11, 2022
Numerical Methods with Python, Numpy and Matplotlib
Numerical Bric-a-Brac Collections of numerical techniques with Python and standard computational packages (Numpy, SciPy, Numba, Matplotlib ...). Diffe
 10 Dec 20, 2021
10 Dec 20, 2021

NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser.
NiceGUI NiceGUI is an easy to use, Python-based UI framework, which renderes to the web browser. You can create buttons, dialogs, markdown, 3D scences
 419 Jan 9, 2023
419 Jan 9, 2023

Pypot ⚙️ A Python library for Dynamixel motor control
Pypot ⚙️ A Python library for Dynamixel motor control Pypot is a cross-platform Python library making it easy and fast to control custom robots based
 238 Nov 21, 2022
238 Nov 21, 2022

3D-Lorenz-Attractor-simulation-with-python
3D-Lorenz-Attractor-simulation-with-python Animação 3D da trajetória do Atrator de Lorenz, implementada em Python usando o método de Runge-Kutta de 4ª
 17 Dec 8, 2022
17 Dec 8, 2022
🔀 Visual Room Rearrangement
AI2-THOR Rearrangement Challenge Welcome to the 2021 AI2-THOR Rearrangement Challenge hosted at the CVPR'21 Embodied-AI Workshop. The goal of this cha
 55 Dec 22, 2022
55 Dec 22, 2022
Monty Hall Problem simulation written in Python.
Monty Hall Problem Simulation monty_hall_sim is a brute-force method of determining the optimal strategy for the Monty Hall Problem. Usage Set boolean
 1 Aug 29, 2022
1 Aug 29, 2022

A modular dynamical-systems model of Ethereum's validator economics.
CADLabs Ethereum Economic Model A modular dynamical-systems model of Ethereum's validator economics, based on the open-source Python library radCAD, a
 104 Jan 3, 2023
104 Jan 3, 2023
MeerKAT radio telescope simulation package. Built to simulate multibeam antenna data.
MeerKATgen MeerKAT radio telescope simulation package. Designed with performance in mind and utilizes Just in time compile (JIT) and XLA backed vectro
 6 Jan 23, 2022
6 Jan 23, 2022
A cool little repl-based simulation written in Python
A cool little repl-based simulation written in Python planned to integrate machine-learning into itself to have AI battle to the death before your eye
 6 Sep 17, 2022
6 Sep 17, 2022
![[ACMMM 2021, Oral] Code release for](https://github.com/yikaiw/EIP/raw/main/assets/intro.png)
[ACMMM 2021, Oral] Code release for "Elastic Tactile Simulation Towards Tactile-Visual Perception"
EIP: Elastic Interaction of Particles Code release for "Elastic Tactile Simulation Towards Tactile-Visual Perception", in ACMMM (Oral) 2021. By Yikai
 37 Dec 20, 2022
37 Dec 20, 2022
NOMAD - A blackbox optimization software
################################################################################### #
 78 Dec 29, 2022
78 Dec 29, 2022

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022
PyBERT is a serial communication link bit error rate tester simulator with a graphical user interface (GUI).
PyBERT PyBERT is a serial communication link bit error rate tester simulator with a graphical user interface (GUI). It uses the Traits/UI package of t
 59 Dec 23, 2022
59 Dec 23, 2022
salabim - discrete event simulation in Python
Object oriented discrete event simulation and animation in Python. Includes process control features, resources, queues, monitors. statistical distrib
 181 Dec 21, 2022
181 Dec 21, 2022
Historical battle simulation package for Python
Jomini v0.1.4 Jomini creates military simulations by using mathematical combat models. Designed to be helpful for game developers, students, history e
 36 Dec 8, 2022
36 Dec 8, 2022

This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
This is a repository to learn and get more computer vision skills, make robotics projects integrating the computer vision as a perception tool and create a lot of awesome advanced controllers for the robots of the future.
 17 Nov 3, 2022
17 Nov 3, 2022

PyDynamica is a freely available agent-based economy simulation
PyDynamica PyDynamica is a pure python implementation of Sociodynamica, a virtual environment to simulate a simple economy with minimal dependencies.
 4 Sep 10, 2022
4 Sep 10, 2022
Python / C++ based particle reaction-diffusion simulator
ReaDDy (Reaction Diffusion Dynamics) is an open source particle based reaction-diffusion simulator that can be configured and run via Python. Currentl
 46 Dec 9, 2022
46 Dec 9, 2022
Machine learning algorithms for many-body quantum systems
NetKet NetKet is an open-source project delivering cutting-edge methods for the study of many-body quantum systems with artificial neural networks and
 413 Dec 31, 2022
413 Dec 31, 2022
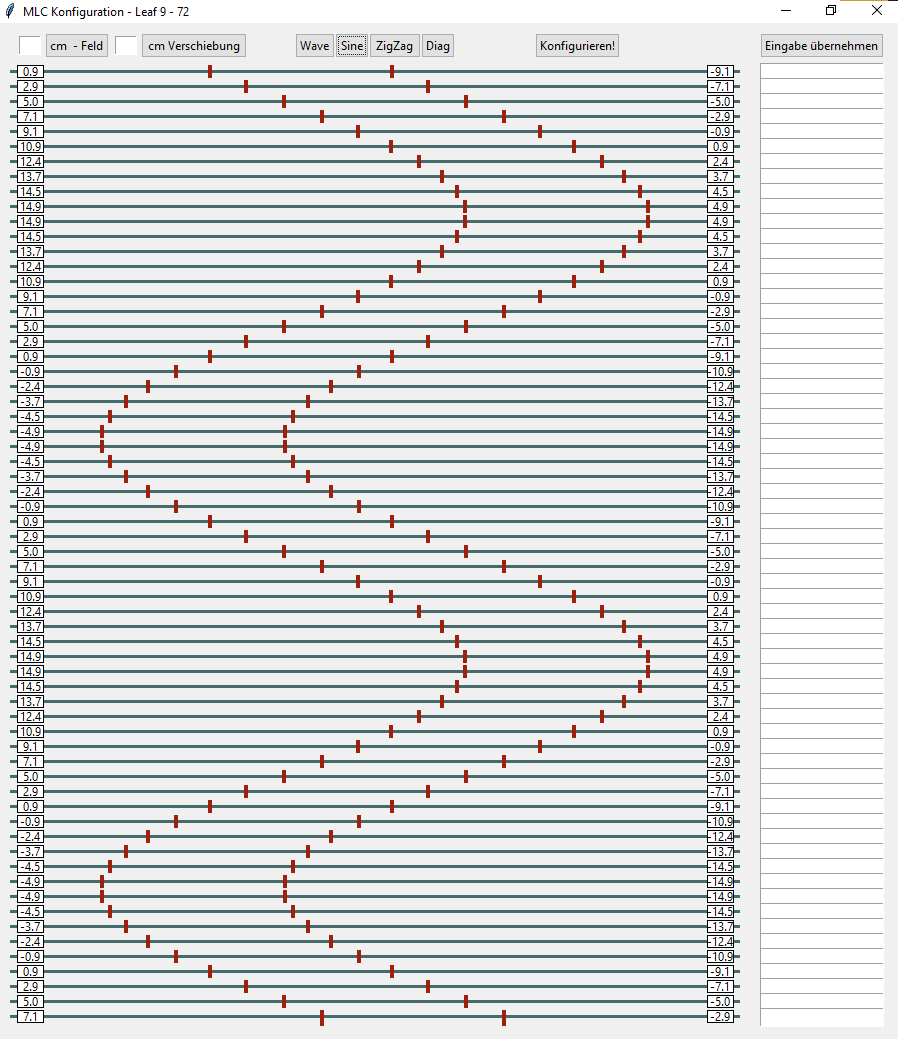
A GUI to automatically create a TOPAS-readable MLC simulation file
Python script to create a TOPAS-readable simulation file descriring a Multi-Leaf-Collimator. Builds the MLC using the data from a 3D .stl file.
 0 Jun 19, 2022
0 Jun 19, 2022
Python script to automate the plotting and analysis of percentage depth dose and dose profile simulations in TOPAS.
topas-create-graphs A script to automatically plot the results of a topas simulation Works for percentage depth dose (pdd) and dose profiles (dp). Dep
10 Dec 8, 2022
Python script to combine the statistical results of a TOPAS simulation that was split up into multiple batches.
topas-merge-simulations Python script to combine the statistical results of a TOPAS simulation that was split up into multiple batches At the top of t
1 Aug 16, 2022

RLBot Python bindings for the Rust crate rl_ball_sym
RLBot Python bindings for rl_ball_sym 0.6 Prerequisites: Rust & Cargo Build Tools for Visual Studio RLBot - Verify that the file %localappdata%\RLBotG
 2 Nov 25, 2022
2 Nov 25, 2022

An Abstract Cyber Security Simulation and Markov Game for OpenAI Gym
gym-idsgame An Abstract Cyber Security Simulation and Markov Game for OpenAI Gym gym-idsgame is a reinforcement learning environment for simulating at
 29 Dec 3, 2022
29 Dec 3, 2022
Robot Hacking Manual (RHM). From robotics to cybersecurity. Papers, notes and writeups from a journey into robot cybersecurity.
RHM: Robot Hacking Manual Download in PDF RHM v0.4 ┃ Read online The Robot Hacking Manual (RHM) is an introductory series about cybersecurity for robo
 233 Dec 30, 2022
233 Dec 30, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
Simulation-based performance analysis of server-less Blockchain-enabled Federated Learning
Blockchain-enabled Server-less Federated Learning Repository containing the files used to reproduce the results of the publication "Blockchain-enabled
 9 Sep 27, 2022
9 Sep 27, 2022

OstrichRL: A Musculoskeletal Ostrich Simulation to Study Bio-mechanical Locomotion.
OstrichRL This is the repository accompanying the paper OstrichRL: A Musculoskeletal Ostrich Simulation to Study Bio-mechanical Locomotion. It contain
 51 Nov 17, 2022
51 Nov 17, 2022

This is a Boids Simulation, written in Python with Pygame.
PyNBoids A Python Boids Simulation This is a Boids simulation, written in Python3, with Pygame2 and NumPy. To use: Save the pynboids_sp.py file (and n
 17 Dec 18, 2022
17 Dec 18, 2022
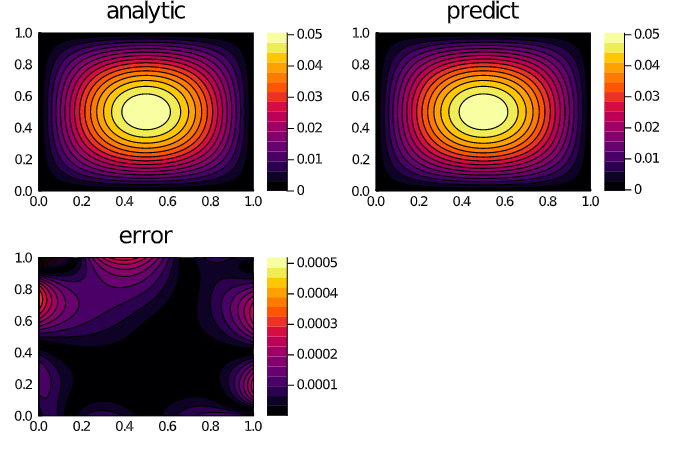
Physics-Informed Neural Networks (PINN) and Deep BSDE Solvers of Differential Equations for Scientific Machine Learning (SciML) accelerated simulation
NeuralPDE NeuralPDE.jl is a solver package which consists of neural network solvers for partial differential equations using scientific machine learni
 680 Jan 2, 2023
680 Jan 2, 2023
![[TPDS'21] COSCO: Container Orchestration using Co-Simulation and Gradient Based Optimization for Fog Computing Environments](https://github.com/imperial-qore/COSCO/raw/master/wiki/COSCO.jpg)
[TPDS'21] COSCO: Container Orchestration using Co-Simulation and Gradient Based Optimization for Fog Computing Environments
COSCO Framework COSCO is an AI based coupled-simulation and container orchestration framework for integrated Edge, Fog and Cloud Computing Environment
 39 Dec 25, 2022
39 Dec 25, 2022
Simulation and Parameter Estimation in Geophysics
Simulation and Parameter Estimation in Geophysics - A python package for simulation and gradient based parameter estimation in the context of geophysical applications.
 390 Dec 15, 2022
390 Dec 15, 2022

CONCEPT (COsmological N-body CodE in PyThon) is a free and open-source simulation code for cosmological structure formation
CONCEPT (COsmological N-body CodE in PyThon) is a free and open-source simulation code for cosmological structure formation. The code should run on any Linux system, from massively parallel computer clusters to laptops.
 62 Dec 8, 2022
62 Dec 8, 2022

Percolation simulation using python
PythonPercolation Percolation simulation using python Exemple de percolation : Etude statistique sur le pourcentage de remplissage jusqu'à percolation
 1 Sep 8, 2022
1 Sep 8, 2022
A PowSyBl and Python integration based on GraalVM native image
PyPowSyBl The PyPowSyBl project gives access PowSyBl Java framework to Python developers. This Python integration relies on GraalVM to compile Java co
 23 Dec 14, 2022
23 Dec 14, 2022

A simple Monte Carlo simulation using Python and matplotlib library
Monte Carlo python simulation Install linux dependencies sudo apt update sudo apt install build-essential \ software-properties-commo
 2 Dec 13, 2021
2 Dec 13, 2021
Jiminy, fast and portable Python/C++ simulator of poly-articulated systems with OpenAI Gym interface for reinforcement learning.
Jiminy is a fast and portable cross-platform open-source simulator for poly-articulated systems. It was built with two ideas in mind: provide a fast y
 122 Dec 29, 2022
122 Dec 29, 2022