516 Repositories
Python Noisy-NER-Confidence-Estimation Libraries

MHFormer: Multi-Hypothesis Transformer for 3D Human Pose Estimation
MHFormer: Multi-Hypothesis Transformer for 3D Human Pose Estimation This repo is the official implementation of "MHFormer: Multi-Hypothesis Transforme
 281 Jan 7, 2023
281 Jan 7, 2023
Epidemiology analysis package
zEpid zEpid is an epidemiology analysis package, providing easy to use tools for epidemiologists coding in Python 3.5+. The purpose of this library is
 111 Jan 8, 2023
111 Jan 8, 2023
cleanlab is the data-centric ML ops package for machine learning with noisy labels.
cleanlab is the data-centric ML ops package for machine learning with noisy labels. cleanlab cleans labels and supports finding, quantifying, and lear
 51 Nov 28, 2022
51 Nov 28, 2022
DivNoising is an unsupervised denoising method to generate diverse denoised samples for any noisy input image. This repository contains the code to reproduce the results reported in the paper https://openreview.net/pdf?id=agHLCOBM5jP
DivNoising: Diversity Denoising with Fully Convolutional Variational Autoencoders Mangal Prakash1, Alexander Krull1,2, Florian Jug2 1Authors contribut
 33 Dec 30, 2022
33 Dec 30, 2022
Select, weight and analyze complex sample data
Sample Analytics In large-scale surveys, often complex random mechanisms are used to select samples. Estimates derived from such samples must reflect
 37 Dec 15, 2022
37 Dec 15, 2022
Confidence intervals for scikit-learn forest algorithms
forest-confidence-interval: Confidence intervals for Forest algorithms Forest algorithms are powerful ensemble methods for classification and regressi
 272 Dec 1, 2022
272 Dec 1, 2022

This is an official implementation for "Exploiting Temporal Contexts with Strided Transformer for 3D Human Pose Estimation".
Exploiting Temporal Contexts with Strided Transformer for 3D Human Pose Estimation This repo is the official implementation of Exploiting Temporal Con
241 Jan 7, 2023

Graduation Project
Gesture-Detection-and-Depth-Estimation This is my graduation project. (1) In this project, I use the YOLOv3 object detection model to detect gesture i
 1 Nov 23, 2021
1 Nov 23, 2021
Robust Self-augmentation for NER with Meta-reweighting
Robust Self-augmentation for NER with Meta-reweighting
 17 Nov 22, 2022
17 Nov 22, 2022
Implementation of the paper titled "Using Sampling to Estimate and Improve Performance of Automated Scoring Systems with Guarantees"
Using Sampling to Estimate and Improve Performance of Automated Scoring Systems with Guarantees Implementation of the paper titled "Using Sampling to
 2 Aug 29, 2022
2 Aug 29, 2022
Code for the paper "SmoothMix: Training Confidence-calibrated Smoothed Classifiers for Certified Robustness" (NeurIPS 2021)
SmoothMix: Training Confidence-calibrated Smoothed Classifiers for Certified Robustness (NeurIPS2021) This repository contains code for the paper "Smo
 17 Dec 27, 2022
17 Dec 27, 2022

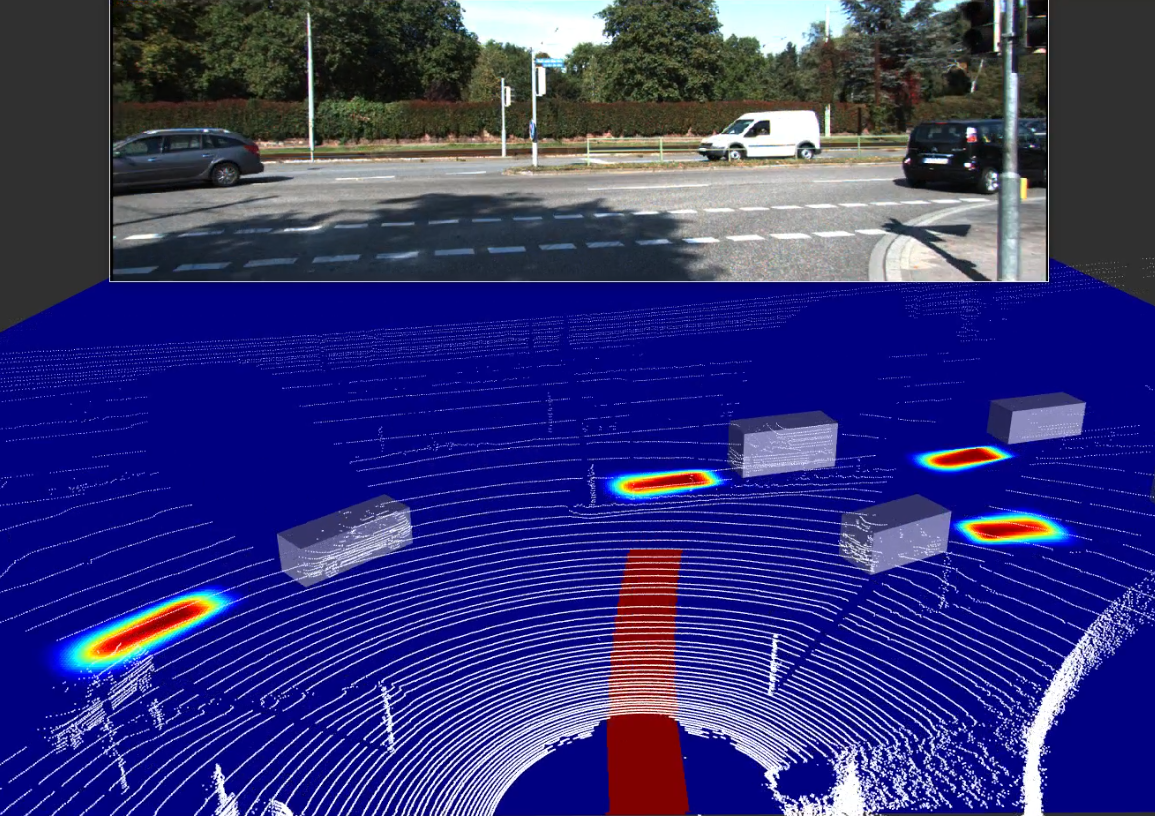
RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation
RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation Anonymous submission Abstract 3D obj
 30 Sep 16, 2022
30 Sep 16, 2022

A very simple baseline to estimate 2D & 3D SMPL-compatible keypoints from a single color image.
Minimal Body A very simple baseline to estimate 2D & 3D SMPL-compatible keypoints from a single color image. The model file is only 51.2 MB and runs a
 49 Dec 5, 2022
49 Dec 5, 2022
Human annotated noisy labels for CIFAR-10 and CIFAR-100.
Dataloader for CIFAR-N CIFAR-10N noise_label = torch.load('./data/CIFAR-10_human.pt') clean_label = noise_label['clean_label'] worst_label = noise_lab
 117 Nov 30, 2022
117 Nov 30, 2022
AgeGuesser: deep learning based age estimation system. Powered by EfficientNet and Yolov5
AgeGuesser AgeGuesser is an end-to-end, deep-learning based Age Estimation system, presented at the CAIP 2021 conference. You can find the related pap
 5 Nov 10, 2022
5 Nov 10, 2022
Source code release of the paper: Knowledge-Guided Deep Fractal Neural Networks for Human Pose Estimation.
GNet-pose Project Page: http://guanghan.info/projects/guided-fractal/ UPDATE 9/27/2018: Prototxts and model that achieved 93.9Pck on LSP dataset. http
 83 Nov 21, 2022
83 Nov 21, 2022
A Tensorflow implementation of the Text Conditioned Auxiliary Classifier Generative Adversarial Network for Generating Images from text descriptions
A Tensorflow implementation of the Text Conditioned Auxiliary Classifier Generative Adversarial Network for Generating Images from text descriptions
 93 Aug 4, 2022
93 Aug 4, 2022

Pose estimation with MoveNet Lightning
Pose Estimation With MoveNet Lightning MoveNet is the TensorFlow pre-trained model that identifies 17 different key points of the human body. It is th
 2 Jan 4, 2022
2 Jan 4, 2022

Object detection, 3D detection, and pose estimation using center point detection:
Objects as Points Object detection, 3D detection, and pose estimation using center point detection: Objects as Points, Xingyi Zhou, Dequan Wang, Phili
 6.7k Jan 3, 2023
6.7k Jan 3, 2023
A scikit-learn-compatible module for estimating prediction intervals.
MAPIE - Model Agnostic Prediction Interval Estimator MAPIE allows you to easily estimate prediction intervals (or prediction sets) using your favourit
588 Jan 4, 2023
healthy and lesion models for learning based on the joint estimation of stochasticity and volatility
health-lesion-stovol healthy and lesion models for learning based on the joint estimation of stochasticity and volatility Reference please cite this p
 5 Nov 1, 2022
5 Nov 1, 2022

Human Pose estimation with TensorFlow framework
Human Pose Estimation with TensorFlow Here you can find the implementation of the Human Body Pose Estimation algorithm, presented in the DeeperCut and
 1.1k Dec 29, 2022
1.1k Dec 29, 2022
Simple Baselines for Human Pose Estimation and Tracking
Simple Baselines for Human Pose Estimation and Tracking News Our new work High-Resolution Representations for Labeling Pixels and Regions is available
 2.7k Jan 5, 2023
2.7k Jan 5, 2023

PyTorch implementation for 3D human pose estimation
Towards 3D Human Pose Estimation in the Wild: a Weakly-supervised Approach This repository is the PyTorch implementation for the network presented in:
579 Dec 22, 2022

 1.2k Dec 26, 2022
1.2k Dec 26, 2022

Single-stage Keypoint-based Category-level Object Pose Estimation from an RGB Image
CenterPose Overview This repository is the official implementation of the paper "Single-stage Keypoint-based Category-level Object Pose Estimation fro
 188 Dec 27, 2022
188 Dec 27, 2022
RATE: Overcoming Noise and Sparsity of Textual Features in Real-Time Location Estimation (CIKM'17)
RATE: Overcoming Noise and Sparsity of Textual Features in Real-Time Location Estimation This is the implementation of RATE: Overcoming Noise and Spar
 5 Feb 10, 2022
5 Feb 10, 2022
Code for "Sparse Steerable Convolutions: An Efficient Learning of SE(3)-Equivariant Features for Estimation and Tracking of Object Poses in 3D Space"
Sparse Steerable Convolution (SS-Conv) Code for "Sparse Steerable Convolutions: An Efficient Learning of SE(3)-Equivariant Features for Estimation and
 25 Dec 21, 2022
25 Dec 21, 2022
Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS 2021), and the code to generate simulation results.
Scalable Intervention Target Estimation in Linear Models Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS
 0 Oct 25, 2021
0 Oct 25, 2021

Solving Zero-Shot Learning in Named Entity Recognition with Common Sense Knowledge
Zero-Shot Learning in Named Entity Recognition with Common Sense Knowledge Associated code for the paper Zero-Shot Learning in Named Entity Recognitio
 13 Dec 25, 2022
13 Dec 25, 2022

KAPAO is an efficient multi-person human pose estimation model that detects keypoints and poses as objects and fuses the detections to predict human poses.
KAPAO (Keypoints and Poses as Objects) KAPAO is an efficient single-stage multi-person human pose estimation model that models keypoints and poses as
 664 Dec 30, 2022
664 Dec 30, 2022
Source code for paper "Deep Diffusion Models for Robust Channel Estimation", TBA.
diffusion-channels Source code for paper "Deep Diffusion Models for Robust Channel Estimation". Generic flow: Use 'matlab/main.mat' to generate traini
 15 Dec 22, 2022
15 Dec 22, 2022

RRxIO - Robust Radar Visual/Thermal Inertial Odometry: Robust and accurate state estimation even in challenging visual conditions.
RRxIO - Robust Radar Visual/Thermal Inertial Odometry RRxIO offers robust and accurate state estimation even in challenging visual conditions. RRxIO c
 64 Dec 29, 2022
64 Dec 29, 2022

TaCL: Improving BERT Pre-training with Token-aware Contrastive Learning
TaCL: Improving BERT Pre-training with Token-aware Contrastive Learning Authors: Yixuan Su, Fangyu Liu, Zaiqiao Meng, Lei Shu, Ehsan Shareghi, and Nig
 21 Nov 17, 2021
21 Nov 17, 2021
The repository contains source code and models to use PixelNet architecture used for various pixel-level tasks. More details can be accessed at http://www.cs.cmu.edu/~aayushb/pixelNet/.
PixelNet: Representation of the pixels, by the pixels, and for the pixels. We explore design principles for general pixel-level prediction problems, f
 196 Aug 10, 2022
196 Aug 10, 2022
CNN Based Meta-Learning for Noisy Image Classification and Template Matching
CNN Based Meta-Learning for Noisy Image Classification and Template Matching Introduction This master thesis used a few-shot meta learning approach to
 2 Dec 9, 2021
2 Dec 9, 2021

the official code for ICRA 2021 Paper: "Multimodal Scale Consistency and Awareness for Monocular Self-Supervised Depth Estimation"
G2S This is the official code for ICRA 2021 Paper: Multimodal Scale Consistency and Awareness for Monocular Self-Supervised Depth Estimation by Hemang
 4 Jul 27, 2022
4 Jul 27, 2022

Official PyTorch Implementation for "Recurrent Video Deblurring with Blur-Invariant Motion Estimation and Pixel Volumes"
PVDNet: Recurrent Video Deblurring with Blur-Invariant Motion Estimation and Pixel Volumes This repository contains the official PyTorch implementatio
 98 Nov 6, 2022
98 Nov 6, 2022
Neural network-based build time estimation for additive manufacturing
Neural network-based build time estimation for additive manufacturing Oh, Y., Sharp, M., Sprock, T., & Kwon, S. (2021). Neural network-based build tim
 1 Nov 15, 2021
1 Nov 15, 2021
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees This repository is the official implementation of the empirica
 2 Oct 2, 2022
2 Oct 2, 2022
Implementation of the state of the art beat-detection, downbeat-detection and tempo-estimation model
The ISMIR 2020 Beat Detection, Downbeat Detection and Tempo Estimation Model Implementation. This is an implementation in TensorFlow to implement the
 1 Nov 12, 2021
1 Nov 12, 2021

Code and models for "Pano3D: A Holistic Benchmark and a Solid Baseline for 360 Depth Estimation", OmniCV Workshop @ CVPR21.
Pano3D A Holistic Benchmark and a Solid Baseline for 360o Depth Estimation Pano3D is a new benchmark for depth estimation from spherical panoramas. We
 50 Dec 29, 2022
50 Dec 29, 2022
Part-aware Measurement for Robust Multi-View Multi-Human 3D Pose Estimation and Tracking
Part-aware Measurement for Robust Multi-View Multi-Human 3D Pose Estimation and Tracking Part-Aware Measurement for Robust Multi-View Multi-Human 3D P
 19 Oct 27, 2022
19 Oct 27, 2022

Direct Multi-view Multi-person 3D Human Pose Estimation
Implementation of NeurIPS-2021 paper: Direct Multi-view Multi-person 3D Human Pose Estimation [paper] [video-YouTube, video-Bilibili] [slides] This is
 251 Dec 30, 2022
251 Dec 30, 2022
TaCL: Improve BERT Pre-training with Token-aware Contrastive Learning
TaCL: Improve BERT Pre-training with Token-aware Contrastive Learning
26 Oct 17, 2022
Collision risk estimation using stochastic motion models
collision_risk_estimation Collision risk estimation using stochastic motion models. This is a new approach, based on stochastic models, to predict the
 7 Jun 26, 2022
7 Jun 26, 2022
Direct Multi-view Multi-person 3D Human Pose Estimation
Implementation of NeurIPS-2021 paper: Direct Multi-view Multi-person 3D Human Pose Estimation [paper] [video-YouTube, video-Bilibili] [slides] This is
253 Jan 5, 2023

PyTorch Implementation of Temporal Output Discrepancy for Active Learning, ICCV 2021
Temporal Output Discrepancy for Active Learning PyTorch implementation of Semi-Supervised Active Learning with Temporal Output Discrepancy, ICCV 2021.
 33 Dec 6, 2022
33 Dec 6, 2022

Generalizing Gaze Estimation with Outlier-guided Collaborative Adaptation
Generalizing Gaze Estimation with Outlier-guided Collaborative Adaptation Our paper is accepted by ICCV2021. Picture: Overview of the proposed Plug-an
 32 Dec 10, 2022
32 Dec 10, 2022
[ICCV 2021] Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation
ADDS-DepthNet This is the official implementation of the paper Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation I
 52 Nov 24, 2022
52 Nov 24, 2022
Code repo for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper.
InterpretableMDE A PyTorch implementation for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper. arXiv link: https://arxiv.or
 16 Aug 12, 2022
16 Aug 12, 2022
Probabilistic-Monocular-3D-Human-Pose-Estimation-with-Normalizing-Flows
Probabilistic-Monocular-3D-Human-Pose-Estimation-with-Normalizing-Flows This is the official implementation of the ICCV 2021 Paper "Probabilistic Mono
 62 Nov 23, 2022
62 Nov 23, 2022

Non-Homogeneous Poisson Process Intensity Modeling and Estimation using Measure Transport
Non-Homogeneous Poisson Process Intensity Modeling and Estimation using Measure Transport This GitHub page provides code for reproducing the results i
 1 Nov 8, 2021
1 Nov 8, 2021

RSC-Net: 3D Human Pose, Shape and Texture from Low-Resolution Images and Videos
RSC-Net: 3D Human Pose, Shape and Texture from Low-Resolution Images and Videos Implementation for "3D Human Pose, Shape and Texture from Low-Resoluti
 42 Nov 10, 2022
42 Nov 10, 2022

General tricks that may help you find bad, or noisy, labels in your dataset
doubtlab A lab for bad labels. Warning still in progress. This repository contains general tricks that may help you find bad, or noisy, labels in your
 449 Dec 26, 2022
449 Dec 26, 2022
An unofficial personal implementation of UM-Adapt, specifically to tackle joint estimation of panoptic segmentation and depth prediction for autonomous driving datasets.
Semisupervised Multitask Learning This repository is an unofficial and slightly modified implementation of UM-Adapt[1] using PyTorch. This code primar
 11 Nov 25, 2022
11 Nov 25, 2022
Named Entity Recognition API used by TEI Publisher
TEI Publisher Named Entity Recognition API This repository contains the API used by TEI Publisher's web-annotation editor to detect entities in the in
 14 Nov 15, 2022
14 Nov 15, 2022
Source code of NeurIPS 2021 Paper ''Be Confident! Towards Trustworthy Graph Neural Networks via Confidence Calibration''
CaGCN This repo is for source code of NeurIPS 2021 paper "Be Confident! Towards Trustworthy Graph Neural Networks via Confidence Calibration". Paper L
 6 Dec 19, 2022
6 Dec 19, 2022

Code for BMVC2021 "MOS: A Low Latency and Lightweight Framework for Face Detection, Landmark Localization, and Head Pose Estimation"
MOS-Multi-Task-Face-Detect Introduction This repo is the official implementation of "MOS: A Low Latency and Lightweight Framework for Face Detection,
 104 Dec 8, 2022
104 Dec 8, 2022
Honours project, on creating a depth estimation map from two stereo images of featureless regions
image-processing This module generates depth maps for shape-blocked-out images Install If working with anaconda, then from the root directory: conda e
 2 Oct 17, 2022
2 Oct 17, 2022
Dealing With Misspecification In Fixed-Confidence Linear Top-m Identification
Dealing With Misspecification In Fixed-Confidence Linear Top-m Identification This repository is the official implementation of [Dealing With Misspeci
 0 Oct 25, 2021
0 Oct 25, 2021
Code and results accompanying our paper titled Mixture Proportion Estimation and PU Learning: A Modern Approach at Neurips 2021 (Spotlight)
Mixture Proportion Estimation and PU Learning: A Modern Approach This repository is the official implementation of Mixture Proportion Estimation and P
 23 Dec 28, 2022
23 Dec 28, 2022

HHP-Net: A light Heteroscedastic neural network for Head Pose estimation with uncertainty
HHP-Net: A light Heteroscedastic neural network for Head Pose estimation with uncertainty Giorgio Cantarini, Francesca Odone, Nicoletta Noceti, Federi
 18 Aug 2, 2022
18 Aug 2, 2022

Elucidating Robust Learning with Uncertainty-Aware Corruption Pattern Estimation
Elucidating Robust Learning with Uncertainty-Aware Corruption Pattern Estimation Introduction 📋 Official implementation of Explainable Robust Learnin
 6 Apr 19, 2022
6 Apr 19, 2022

Monocular 3D pose estimation. OpenVINO. CPU inference or iGPU (OpenCL) inference.
human-pose-estimation-3d-python-cpp RealSenseD435 (RGB) 480x640 + CPU Corei9 45 FPS (Depth is not used) 1. Run 1-1. RealSenseD435 (RGB) 480x640 + CPU
 8 Oct 3, 2022
8 Oct 3, 2022
Code for "SRHEN: Stepwise-Refining Homography Estimation Network via Parsing Geometric Correspondences in Deep Latent Space"
SRHEN This is a better and simpler implementation for "SRHEN: Stepwise-Refining Homography Estimation Network via Parsing Geometric Correspondences in
 1 Oct 28, 2022
1 Oct 28, 2022
Use Google's BERT for named entity recognition (CoNLL-2003 as the dataset).
For better performance, you can try NLPGNN, see NLPGNN for more details. BERT-NER Version 2 Use Google's BERT for named entity recognition (CoNLL-2003
 1.2k Dec 26, 2022
1.2k Dec 26, 2022
Implemented shortest-circuit disambiguation, maximum probability disambiguation, HMM-based lexical annotation and BiLSTM+CRF-based named entity recognition
Implemented shortest-circuit disambiguation, maximum probability disambiguation, HMM-based lexical annotation and BiLSTM+CRF-based named entity recognition
 0 Feb 13, 2022
0 Feb 13, 2022

Tensorflow implementation and notebooks for Implicit Maximum Likelihood Estimation
tf-imle Tensorflow 2 and PyTorch implementation and Jupyter notebooks for Implicit Maximum Likelihood Estimation (I-MLE) proposed in the NeurIPS 2021
 69 Dec 13, 2022
69 Dec 13, 2022

3D Pose Estimation for Vehicles
3D Pose Estimation for Vehicles Introduction This work generates 4 key-points and 2 key-edges from vertices and edges of vehicles as ground truth. The
 1 Nov 1, 2021
1 Nov 1, 2021
Python library for analysis of time series data including dimensionality reduction, clustering, and Markov model estimation
deeptime Releases: Installation via conda recommended. conda install -c conda-forge deeptime pip install deeptime Documentation: deeptime-ml.github.io
 495 Dec 28, 2022
495 Dec 28, 2022
Chinese NER(Named Entity Recognition) using BERT(Softmax, CRF, Span)
Chinese NER(Named Entity Recognition) using BERT(Softmax, CRF, Span)
 1.6k Jan 3, 2023
1.6k Jan 3, 2023

Testing and Estimation of structural breaks in Stata
xtbreak estimating and testing for many known and unknown structural breaks in time series and panel data. For an overview of xtbreak test see xtbreak
 13 Jun 19, 2022
13 Jun 19, 2022
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees This repository is the official implementation of the empirica
2 Oct 2, 2022
Generalized Jensen-Shannon Divergence Loss for Learning with Noisy Labels
The official code for the NeurIPS 2021 paper Generalized Jensen-Shannon Divergence Loss for Learning with Noisy Labels
 13 Dec 22, 2022
13 Dec 22, 2022
Contains supplementary materials for reproduce results in HMC divergence time estimation manuscript
Scalable Bayesian divergence time estimation with ratio transformations This repository contains the instructions and files to reproduce the analyses
 1 Sep 21, 2022
1 Sep 21, 2022

Attack on Confidence Estimation algorithm from the paper "Disrupting Deep Uncertainty Estimation Without Harming Accuracy"
Attack on Confidence Estimation (ACE) This repository is the official implementation of "Disrupting Deep Uncertainty Estimation Without Harming Accura
 3 Mar 30, 2022
3 Mar 30, 2022

Code repository for the paper: Hierarchical Kinematic Probability Distributions for 3D Human Shape and Pose Estimation from Images in the Wild (ICCV 2021)
Hierarchical Kinematic Probability Distributions for 3D Human Shape and Pose Estimation from Images in the Wild Akash Sengupta, Ignas Budvytis, Robert
 149 Dec 14, 2022
149 Dec 14, 2022

Light-weight network, depth estimation, knowledge distillation, real-time depth estimation, auxiliary data.
light-weight-depth-estimation Boosting Light-Weight Depth Estimation Via Knowledge Distillation, https://arxiv.org/abs/2105.06143 Junjie Hu, Chenyou F
 13 Dec 10, 2022
13 Dec 10, 2022

PoseCamera is python based SDK for human pose estimation through RGB webcam.
PoseCamera PoseCamera is python based SDK for human pose estimation through RGB webcam. Install install posecamera package through pip pip install pos
 7 Jul 20, 2021
7 Jul 20, 2021

Improving Calibration for Long-Tailed Recognition (CVPR2021)
MiSLAS Improving Calibration for Long-Tailed Recognition Authors: Zhisheng Zhong, Jiequan Cui, Shu Liu, Jiaya Jia [arXiv] [slide] [BibTeX] Introductio
 116 Dec 20, 2022
116 Dec 20, 2022
NeurIPS 2021, "Fine Samples for Learning with Noisy Labels"
[Official] FINE Samples for Learning with Noisy Labels This repository is the official implementation of "FINE Samples for Learning with Noisy Labels"
 27 Dec 23, 2022
27 Dec 23, 2022
Code for the Weighted, Accelerated and Restarted Primal-dual algorithm. This algorithm achieves stable linear convergence for reconstruction from undersampled noisy measurements under an approximate sharpness condition. See the paper for details.
WARPd Code for the Weighted, Accelerated and Restarted Primal-dual algorithm. This algorithm achieves stable linear convergence for reconstruction fro
 1 Apr 8, 2022
1 Apr 8, 2022

Test-Time Personalization with a Transformer for Human Pose Estimation, NeurIPS 2021
Transforming Self-Supervision in Test Time for Personalizing Human Pose Estimation This is an official implementation of the NeurIPS 2021 paper: Trans
 41 Nov 28, 2022
41 Nov 28, 2022

PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
Unsupervised Depth Completion with Calibrated Backprojection Layers PyTorch implementation of Unsupervised Depth Completion with Calibrated Backprojec
 80 Dec 13, 2022
80 Dec 13, 2022

Relative Uncertainty Learning for Facial Expression Recognition
Relative Uncertainty Learning for Facial Expression Recognition The official implementation of the following paper at NeurIPS2021: Title: Relative Unc
 35 Dec 28, 2022
35 Dec 28, 2022
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
80 Dec 13, 2022

This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021
DIFFNet This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021 A new backbone for self-supervised d
 3 Oct 22, 2021
3 Oct 22, 2021
Joint Gaussian Graphical Model Estimation: A Survey
Joint Gaussian Graphical Model Estimation: A Survey Test Models Fused graphical lasso [1] Group graphical lasso [1] Graphical lasso [1] Doubly joint s
 1 Aug 10, 2022
1 Aug 10, 2022
Implicit hierarchical a posteriori error estimates in FEniCSx
FEniCSx Error Estimation (FEniCSx-EE) Description FEniCSx-EE is an open source library showing how various error estimation strategies can be implemen
 1 Dec 8, 2021
1 Dec 8, 2021
![[BMVC 2021] Official PyTorch Implementation of Self-supervised learning of Image Scale and Orientation Estimation](https://github.com/bluedream1121/self-sca-ori/raw/main/assets/architecture.png)
[BMVC 2021] Official PyTorch Implementation of Self-supervised learning of Image Scale and Orientation Estimation
Self-Supervised Learning of Image Scale and Orientation Estimation (BMVC 2021) This is the official implementation of the paper "Self-Supervised Learn
 17 Nov 10, 2022
17 Nov 10, 2022

LWCC: A LightWeight Crowd Counting library for Python that includes several pretrained state-of-the-art models.
LWCC: A LightWeight Crowd Counting library for Python LWCC is a lightweight crowd counting framework for Python. It wraps four state-of-the-art models
 39 Dec 28, 2022
39 Dec 28, 2022
EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation
EFENet EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation Code is a bit messy now. I woud clean up soon. For training the EF
 6 Oct 20, 2021
6 Oct 20, 2021
This is the 3D Implementation of 《Inconsistency-aware Uncertainty Estimation for Semi-supervised Medical Image Segmentation》
CoraNet This is the 3D Implementation of 《Inconsistency-aware Uncertainty Estimation for Semi-supervised Medical Image Segmentation》 Environment pytor
 25 Nov 8, 2022
25 Nov 8, 2022
Demystifying How Self-Supervised Features Improve Training from Noisy Labels
Demystifying How Self-Supervised Features Improve Training from Noisy Labels This code is a PyTorch implementation of the paper "[Demystifying How Sel
4 Oct 14, 2022

Scalable implementation of Lee / Mykland (2012) and Ait-Sahalia / Jacod (2012) Jump tests for noisy high frequency data
JumpDetectR Name of QuantLet : JumpDetectR Published in : 'To be published as "Jump dynamics in high frequency crypto markets"' Description : 'Scala
 12 Jan 1, 2023
12 Jan 1, 2023

Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model in Tensorflow Lite.
TFLite-msg_chn_wacv20-depth-completion Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model
 2 Oct 4, 2021
2 Oct 4, 2021
EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation
EFENet EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation Code is a bit messy now. I woud clean up soon. For training the EF
19 Nov 5, 2022

Official Repository for our ICCV2021 paper: Continual Learning on Noisy Data Streams via Self-Purified Replay
Continual Learning on Noisy Data Streams via Self-Purified Replay This repository contains the official PyTorch implementation for our ICCV2021 paper.
 22 Nov 23, 2022
22 Nov 23, 2022

This repository contains the code for "SBEVNet: End-to-End Deep Stereo Layout Estimation" paper by Divam Gupta, Wei Pu, Trenton Tabor, Jeff Schneider
SBEVNet: End-to-End Deep Stereo Layout Estimation This repository contains the code for "SBEVNet: End-to-End Deep Stereo Layout Estimation" paper by D
 19 Dec 17, 2022
19 Dec 17, 2022