583 Repositories
Python ONNX-HITNET-Stereo-Depth-estimation Libraries
A code generator from ONNX to PyTorch code
onnx-pytorch Generating pytorch code from ONNX. Currently support onnx==1.9.0 and torch==1.8.1. Installation From PyPI pip install onnx-pytorch From
 94 Jan 6, 2023
94 Jan 6, 2023

Fashion Landmark Estimation with HRNet
HRNet for Fashion Landmark Estimation (Modified from deep-high-resolution-net.pytorch) Introduction This code applies the HRNet (Deep High-Resolution
 91 Dec 26, 2022
91 Dec 26, 2022
![the code for our CVPR 2021 paper Bilateral Grid Learning for Stereo Matching Network [BGNet]](https://github.com/3DCVdeveloper/BGNet/raw/master/BGNet.png)
the code for our CVPR 2021 paper Bilateral Grid Learning for Stereo Matching Network [BGNet]
BGNet This repository contains the code for our CVPR 2021 paper Bilateral Grid Learning for Stereo Matching Network [BGNet] Environment Python 3.6.* C
 87 Nov 29, 2022
87 Nov 29, 2022
Estimation of human density in a closed space using deep learning.
Siemens HOLLZOF challenge - Human Density Estimation Add project description here. Installing Dependencies: Install Python3 either system-wide, user-w
 3 Aug 8, 2021
3 Aug 8, 2021

Drone-based Joint Density Map Estimation, Localization and Tracking with Space-Time Multi-Scale Attention Network
DroneCrowd Paper Detection, Tracking, and Counting Meets Drones in Crowds: A Benchmark. Introduction This paper proposes a space-time multi-scale atte
 98 Nov 16, 2022
98 Nov 16, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022

Face Detection & Age Gender & Expression & Recognition
Face Detection & Age Gender & Expression & Recognition
 188 Dec 28, 2022
188 Dec 28, 2022

Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation
CorDA Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation Prerequisite Please create and activate the follo
 60 Nov 30, 2022
60 Nov 30, 2022
Incorporating Transformer and LSTM to Kalman Filter with EM algorithm
Deep learning based state estimation: incorporating Transformer and LSTM to Kalman Filter with EM algorithm Overview Kalman Filter requires the true p
 57 Dec 27, 2022
57 Dec 27, 2022

YOLOv5 in PyTorch ONNX CoreML TFLite
This repository represents Ultralytics open-source research into future object detection methods, and incorporates lessons learned and best practices evolved over thousands of hours of training and evolution on anonymized client datasets. All code and models are under active development, and are subject to modification or deletion without notice.
 34.1k Dec 31, 2022
34.1k Dec 31, 2022
PyTorch ,ONNX and TensorRT implementation of YOLOv4
PyTorch ,ONNX and TensorRT implementation of YOLOv4
 4.2k Jan 1, 2023
4.2k Jan 1, 2023

Location-Sensitive Visual Recognition with Cross-IOU Loss
The trained models are temporarily unavailable, but you can train the code using reasonable computational resource. Location-Sensitive Visual Recognit
 146 Dec 25, 2022
146 Dec 25, 2022

Official Pytorch implementation of "Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video", CVPR 2021
TCMR: Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video Qualtitative result Paper teaser video Introduction This r
 215 Jan 6, 2023
215 Jan 6, 2023

Code and datasets for the paper "Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction" (RA-L, 2021)
Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction This is the code for the paper Combining E
 69 Dec 26, 2022
69 Dec 26, 2022

SNE-RoadSeg in PyTorch, ECCV 2020
SNE-RoadSeg Introduction This is the official PyTorch implementation of SNE-RoadSeg: Incorporating Surface Normal Information into Semantic Segmentati
 242 Dec 20, 2022
242 Dec 20, 2022

AdelaiDepth is an open source toolbox for monocular depth prediction.
AdelaiDepth is an open source toolbox for monocular depth prediction.
 743 Jan 1, 2023
743 Jan 1, 2023

This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution Network.
Lite-HRNet: A Lightweight High-Resolution Network Introduction This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution
 675 Dec 25, 2022
675 Dec 25, 2022

This repository contains a pytorch implementation of "StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision".
StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision | Project Page | Paper | This repository contains a pytorch implementation of "St
 87 Dec 9, 2022
87 Dec 9, 2022

Code for "Single-view robot pose and joint angle estimation via render & compare", CVPR 2021 (Oral).
Single-view robot pose and joint angle estimation via render & compare Yann Labbé, Justin Carpentier, Mathieu Aubry, Josef Sivic CVPR: Conference on C
 51 Oct 14, 2022
51 Oct 14, 2022

WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose
WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose Yijun Zhou and James Gregson - BMVC2020 Abstract: We present an end-to-end head-pos
 368 Dec 26, 2022
368 Dec 26, 2022
Just Go with the Flow: Self-Supervised Scene Flow Estimation
Just Go with the Flow: Self-Supervised Scene Flow Estimation Code release for the paper Just Go with the Flow: Self-Supervised Scene Flow Estimation,
 50 Nov 22, 2022
50 Nov 22, 2022
TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Prediction.
TalkNet 2 [WIP] TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Predictio
 69 Dec 17, 2022
69 Dec 17, 2022
(Arxiv 2021) NeRF--: Neural Radiance Fields Without Known Camera Parameters
NeRF--: Neural Radiance Fields Without Known Camera Parameters Project Page | Arxiv | Colab Notebook | Data Zirui Wang¹, Shangzhe Wu², Weidi Xie², Min
 411 Dec 26, 2022
411 Dec 26, 2022

CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering" official PyTorch implementation.
LED2-Net This is PyTorch implementation of our CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering". Y
 83 Jan 4, 2023
83 Jan 4, 2023
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks. Bayesian-Torch is designed to be flexible and seamless in extending a deterministic deep neural network architecture to corresponding Bayesian form by simply replacing the deterministic layers with Bayesian layers.
 210 Jan 4, 2023
210 Jan 4, 2023
OpenMMLab Pose Estimation Toolbox and Benchmark.
Introduction English | 简体中文 MMPose is an open-source toolbox for pose estimation based on PyTorch. It is a part of the OpenMMLab project. The master b
 2.8k Dec 31, 2022
2.8k Dec 31, 2022
Sandbox for training deep learning networks
Deep learning networks This repo is used to research convolutional networks primarily for computer vision tasks. For this purpose, the repo contains (
 2.7k Jan 1, 2023
2.7k Jan 1, 2023

(NeurIPS 2020) Wasserstein Distances for Stereo Disparity Estimation
Wasserstein Distances for Stereo Disparity Estimation Accepted in NeurIPS 2020 as Spotlight. [Project Page] Wasserstein Distances for Stereo Disparity
 92 Dec 12, 2022
92 Dec 12, 2022

Categorical Depth Distribution Network for Monocular 3D Object Detection
CaDDN CaDDN is a monocular-based 3D object detection method. This repository is based off of [OpenPCDet]. Categorical Depth Distribution Network for M
 289 Jan 5, 2023
289 Jan 5, 2023
POT : Python Optimal Transport
This open source Python library provide several solvers for optimization problems related to Optimal Transport for signal, image processing and machine learning.
 1.7k Jan 4, 2023
1.7k Jan 4, 2023

《Where am I looking at? Joint Location and Orientation Estimation by Cross-View Matching》(CVPR 2020)
This contains the codes for cross-view geo-localization method described in: Where am I looking at? Joint Location and Orientation Estimation by Cross-View Matching, CVPR2020.
 41 Oct 27, 2022
41 Oct 27, 2022

Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation
Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation This is the official repository for our paper Neural Reprojection Error
 78 Dec 1, 2022
78 Dec 1, 2022
This is an official implementation of our CVPR 2021 paper "Bottom-Up Human Pose Estimation Via Disentangled Keypoint Regression" (https://arxiv.org/abs/2104.02300)
Bottom-Up Human Pose Estimation Via Disentangled Keypoint Regression Introduction In this paper, we are interested in the bottom-up paradigm of estima
367 Dec 27, 2022

Facial Action Unit Intensity Estimation via Semantic Correspondence Learning with Dynamic Graph Convolution
FAU Implementation of the paper: Facial Action Unit Intensity Estimation via Semantic Correspondence Learning with Dynamic Graph Convolution. Yingruo
 78 Nov 29, 2022
78 Nov 29, 2022
Planar Prior Assisted PatchMatch Multi-View Stereo
ACMP [News] The code for ACMH is released!!! [News] The code for ACMM is released!!! About This repository contains the code for the paper Planar Prio
 127 Dec 31, 2022
127 Dec 31, 2022

Repository for the paper "PoseAug: A Differentiable Pose Augmentation Framework for 3D Human Pose Estimation", CVPR 2021.
PoseAug: A Differentiable Pose Augmentation Framework for 3D Human Pose Estimation Code repository for the paper: PoseAug: A Differentiable Pose Augme
 328 Dec 17, 2022
328 Dec 17, 2022
Code for "LoFTR: Detector-Free Local Feature Matching with Transformers", CVPR 2021
LoFTR: Detector-Free Local Feature Matching with Transformers Project Page | Paper LoFTR: Detector-Free Local Feature Matching with Transformers Jiami
 1.4k Jan 4, 2023
1.4k Jan 4, 2023

Simple Pose: Rethinking and Improving a Bottom-up Approach for Multi-Person Pose Estimation
SimplePose Code and pre-trained models for our paper, “Simple Pose: Rethinking and Improving a Bottom-up Approach for Multi-Person Pose Estimation”, a
 256 Dec 24, 2022
256 Dec 24, 2022
Multi-Scale Geometric Consistency Guided Multi-View Stereo
ACMM [News] The code for ACMH is released!!! [News] The code for ACMP is released!!! About ACMM is a multi-scale geometric consistency guided multi-vi
118 Jan 4, 2023

The project is an official implementation of our paper "3D Human Pose Estimation with Spatial and Temporal Transformers".
3D Human Pose Estimation with Spatial and Temporal Transformers This repo is the official implementation for 3D Human Pose Estimation with Spatial and
 363 Dec 28, 2022
363 Dec 28, 2022
Code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction
Official PyTorch code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction. Guanglei Yang, Hao Tang, Mingli Ding, Nicu Sebe,
 152 Dec 16, 2022
152 Dec 16, 2022
Python Kalman filtering and optimal estimation library. Implements Kalman filter, particle filter, Extended Kalman filter, Unscented Kalman filter, g-h (alpha-beta), least squares, H Infinity, smoothers, and more. Has companion book 'Kalman and Bayesian Filters in Python'.
FilterPy - Kalman filters and other optimal and non-optimal estimation filters in Python. NOTE: Imminent drop of support of Python 2.7, 3.4. See secti
 2.5k Dec 30, 2022
2.5k Dec 30, 2022

Scikit-learn compatible estimation of general graphical models
skggm : Gaussian graphical models using the scikit-learn API In the last decade, learning networks that encode conditional independence relationships
 213 Jan 2, 2023
213 Jan 2, 2023
Pretrained EfficientNet, EfficientNet-Lite, MixNet, MobileNetV3 / V2, MNASNet A1 and B1, FBNet, Single-Path NAS
(Generic) EfficientNets for PyTorch A 'generic' implementation of EfficientNet, MixNet, MobileNetV3, etc. that covers most of the compute/parameter ef
 1.5k Jan 1, 2023
1.5k Jan 1, 2023

Implementation of "Meta-rPPG: Remote Heart Rate Estimation Using a Transductive Meta-Learner"
Meta-rPPG: Remote Heart Rate Estimation Using a Transductive Meta-Learner This repository is the official implementation of Meta-rPPG: Remote Heart Ra
 137 Dec 13, 2022
137 Dec 13, 2022

⚡ boost inference speed of T5 models by 5x & reduce the model size by 3x using fastT5.
Reduce T5 model size by 3X and increase the inference speed up to 5X. Install Usage Details Functionalities Benchmarks Onnx model Quantized onnx model
 399 Jan 5, 2023
399 Jan 5, 2023
git git《Transformer Meets Tracker: Exploiting Temporal Context for Robust Visual Tracking》(CVPR 2021) GitHub:git2] 《Masksembles for Uncertainty Estimation》(CVPR 2021) GitHub:git3]
Transformer Meets Tracker: Exploiting Temporal Context for Robust Visual Tracking Ning Wang, Wengang Zhou, Jie Wang, and Houqiang Li Accepted by CVPR
 236 Dec 22, 2022
236 Dec 22, 2022

Linear Prediction Coefficients estimation from mel-spectrogram implemented in Python based on Levinson-Durbin algorithm.
LPC_for_TTS Linear Prediction Coefficients estimation from mel-spectrogram implemented in Python based on Levinson-Durbin algorithm. 基于Levinson-Durbin
 58 Nov 17, 2022
58 Nov 17, 2022
Monocular Depth Estimation - Weighted-average prediction from multiple pre-trained depth estimation models
merged_depth runs (1) AdaBins, (2) DiverseDepth, (3) MiDaS, (4) SGDepth, and (5) Monodepth2, and calculates a weighted-average per-pixel absolute dept
 39 Nov 21, 2022
39 Nov 21, 2022
![[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.](https://github.com/ethnhe/FFB6D/raw/master/figs/FFB6D_overview.png)
[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.
FFB6D This is the official source code for the CVPR2021 Oral work, FFB6D: A Full Flow Biderectional Fusion Network for 6D Pose Estimation. (Arxiv) Tab
 201 Dec 28, 2022
201 Dec 28, 2022
Bottom-up Human Pose Estimation
Introduction This is the official code of Rethinking the Heatmap Regression for Bottom-up Human Pose Estimation. This paper has been accepted to CVPR2
 108 Dec 1, 2022
108 Dec 1, 2022

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022

Deep Dual Consecutive Network for Human Pose Estimation (CVPR2021)
Deep Dual Consecutive Network for Human Pose Estimation (CVPR2021) Introduction This is the official code of Deep Dual Consecutive Network for Human P
 295 Dec 29, 2022
295 Dec 29, 2022

Official PyTorch Implementation of Unsupervised Learning of Scene Flow Estimation Fusing with Local Rigidity
UnRigidFlow This is the official PyTorch implementation of UnRigidFlow (IJCAI2019). Here are two sample results (~10MB gif for each) of our unsupervis
 28 Nov 16, 2022
28 Nov 16, 2022

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022

Object Depth via Motion and Detection Dataset
ODMD Dataset ODMD is the first dataset for learning Object Depth via Motion and Detection. ODMD training data are configurable and extensible, with ea
 172 Dec 21, 2022
172 Dec 21, 2022
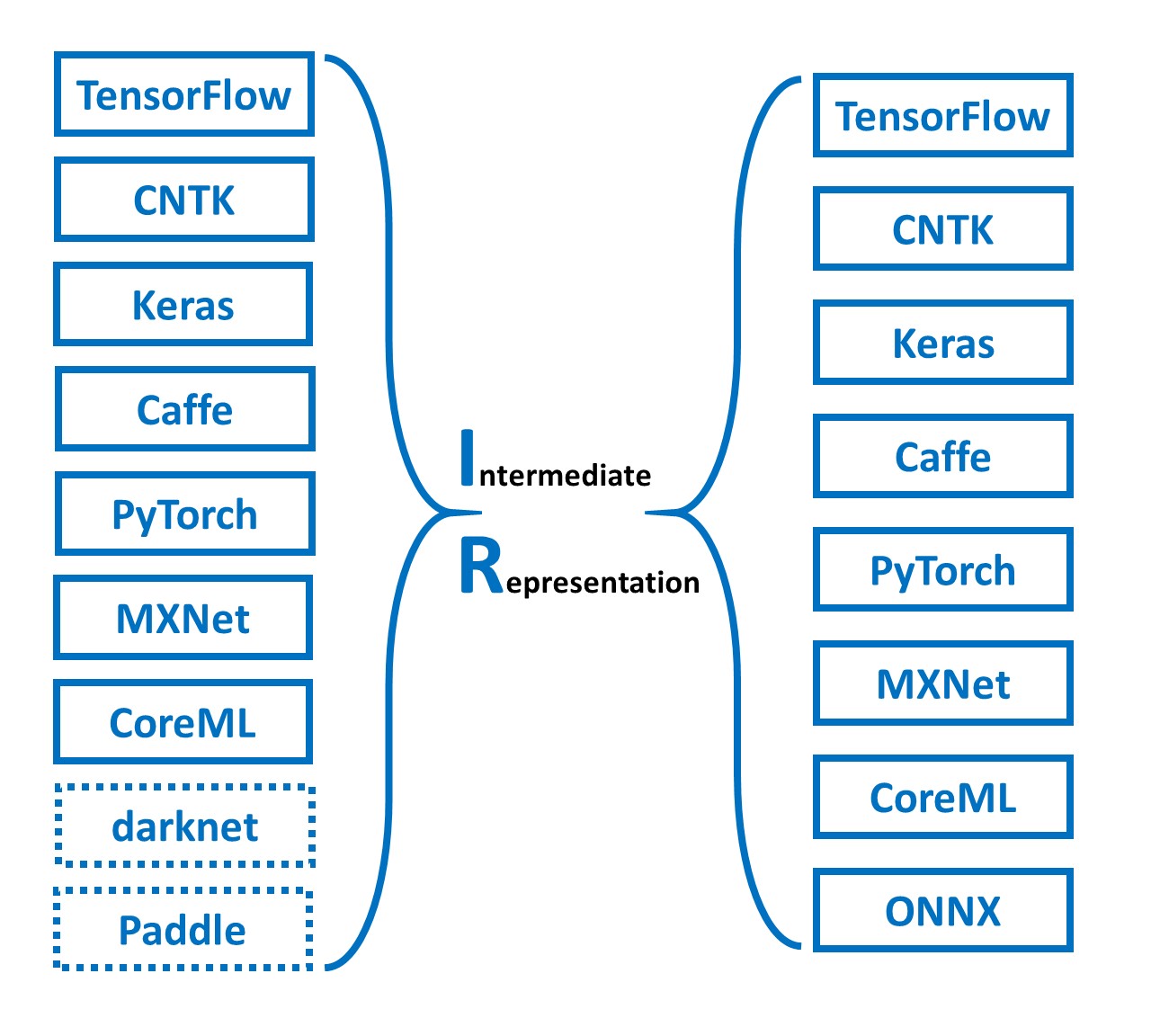
MMdnn is a set of tools to help users inter-operate among different deep learning frameworks. E.g. model conversion and visualization. Convert models between Caffe, Keras, MXNet, Tensorflow, CNTK, PyTorch Onnx and CoreML.
MMdnn MMdnn is a comprehensive and cross-framework tool to convert, visualize and diagnose deep learning (DL) models. The "MM" stands for model manage
 5.7k Jan 9, 2023
5.7k Jan 9, 2023
Open standard for machine learning interoperability
Open Neural Network Exchange (ONNX) is an open ecosystem that empowers AI developers to choose the right tools as their project evolves. ONNX provides
 13.9k Dec 30, 2022
13.9k Dec 30, 2022
POT : Python Optimal Transport
POT: Python Optimal Transport This open source Python library provide several solvers for optimization problems related to Optimal Transport for signa
1.7k Dec 31, 2022
Scikit-learn compatible estimation of general graphical models
skggm : Gaussian graphical models using the scikit-learn API In the last decade, learning networks that encode conditional independence relationships
213 Jan 2, 2023

Visualizer for neural network, deep learning, and machine learning models
Netron is a viewer for neural network, deep learning and machine learning models. Netron supports ONNX (.onnx, .pb, .pbtxt), Keras (.h5, .keras), Tens
 20.9k Dec 28, 2022
20.9k Dec 28, 2022

Gluon CV Toolkit
Gluon CV Toolkit | Installation | Documentation | Tutorials | GluonCV provides implementations of the state-of-the-art (SOTA) deep learning models in
 5.4k Jan 6, 2023
5.4k Jan 6, 2023

ICRA 2021 "Towards Precise and Efficient Image Guided Depth Completion"
PENet: Precise and Efficient Depth Completion This repo is the PyTorch implementation of our paper to appear in ICRA2021 on "Towards Precise and Effic
 232 Dec 25, 2022
232 Dec 25, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022
3D Reconstruction Software
Meshroom is a free, open-source 3D Reconstruction Software based on the AliceVision Photogrammetric Computer Vision framework. Learn more details abou
 8.7k Jan 2, 2023
8.7k Jan 2, 2023

Human head pose estimation using Keras over TensorFlow.
RealHePoNet: a robust single-stage ConvNet for head pose estimation in the wild.
 71 Jan 5, 2023
71 Jan 5, 2023

Summarization, translation, sentiment-analysis, text-generation and more at blazing speed using a T5 version implemented in ONNX.
Summarization, translation, Q&A, text generation and more at blazing speed using a T5 version implemented in ONNX. This package is still in alpha stag
 137 Feb 1, 2021
137 Feb 1, 2021
Translate - a PyTorch Language Library
NOTE PyTorch Translate is now deprecated, please use fairseq instead. Translate - a PyTorch Language Library Translate is a library for machine transl
 678 Feb 15, 2021
678 Feb 15, 2021
Storchastic is a PyTorch library for stochastic gradient estimation in Deep Learning
Storchastic is a PyTorch library for stochastic gradient estimation in Deep Learning
 140 Dec 30, 2022
140 Dec 30, 2022

Code for "Learning to Segment Rigid Motions from Two Frames".
rigidmask Code for "Learning to Segment Rigid Motions from Two Frames". ** This is a partial release with inference and evaluation code.
 157 Nov 21, 2022
157 Nov 21, 2022
Summarization, translation, sentiment-analysis, text-generation and more at blazing speed using a T5 version implemented in ONNX.
Summarization, translation, Q&A, text generation and more at blazing speed using a T5 version implemented in ONNX. This package is still in alpha stag
211 Dec 28, 2022
Translate - a PyTorch Language Library
NOTE PyTorch Translate is now deprecated, please use fairseq instead. Translate - a PyTorch Language Library Translate is a library for machine transl
775 Dec 24, 2022
Machine learning framework for both deep learning and traditional algorithms
NeoML is an end-to-end machine learning framework that allows you to build, train, and deploy ML models. This framework is used by ABBYY engineers for
 704 Dec 27, 2022
704 Dec 27, 2022

⚾🤖⚾ Automatic baseball pitching overlay in realtime
⚾ Automatically overlaying pitch motion and trajectory with machine learning! This project takes your baseball pitching clips and automatically genera
 240 Dec 5, 2022
240 Dec 5, 2022

img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation
img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation Figure 1: We estimate the 6DoF rigid transformation of a 3D face (rendered in si
 519 Dec 29, 2022
519 Dec 29, 2022

AIST++ API This repo contains starter code for using the AIST++ dataset.
AIST++ API This repo contains starter code for using the AIST++ dataset. To download the dataset or explore details of this dataset, please go to our
 260 Dec 30, 2022
260 Dec 30, 2022
RTS3D: Real-time Stereo 3D Detection from 4D Feature-Consistency Embedding Space for Autonomous Driving
RTS3D: Real-time Stereo 3D Detection from 4D Feature-Consistency Embedding Space for Autonomous Driving (AAAI2021). RTS3D is efficiency and accuracy s
 71 Nov 29, 2022
71 Nov 29, 2022
[ECCV 2020] Reimplementation of 3DDFAv2, including face mesh, head pose, landmarks, and more.
Stable Head Pose Estimation and Landmark Regression via 3D Dense Face Reconstruction Reimplementation of (ECCV 2020) Towards Fast, Accurate and Stable
 221 Dec 30, 2022
221 Dec 30, 2022
![The official implementation of NeMo: Neural Mesh Models of Contrastive Features for Robust 3D Pose Estimation [ICLR-2021]. https://arxiv.org/pdf/2101.12378.pdf](https://github.com/Angtian/NeMo/raw/main/example.gif)
The official implementation of NeMo: Neural Mesh Models of Contrastive Features for Robust 3D Pose Estimation [ICLR-2021]. https://arxiv.org/pdf/2101.12378.pdf
NeMo: Neural Mesh Models of Contrastive Features for Robust 3D Pose Estimation [ICLR-2021] Release Notes The offical PyTorch implementation of NeMo, p
 76 Nov 23, 2022
76 Nov 23, 2022
Reinforcement Learning Coach by Intel AI Lab enables easy experimentation with state of the art Reinforcement Learning algorithms
Coach Coach is a python reinforcement learning framework containing implementation of many state-of-the-art algorithms. It exposes a set of easy-to-us
2.2k Jan 5, 2023
Visualizer for neural network, deep learning, and machine learning models
Netron is a viewer for neural network, deep learning and machine learning models. Netron supports ONNX (.onnx, .pb, .pbtxt), Keras (.h5, .keras), Tens
21k Jan 6, 2023

The project is an official implementation of our CVPR2019 paper "Deep High-Resolution Representation Learning for Human Pose Estimation"
Deep High-Resolution Representation Learning for Human Pose Estimation (CVPR 2019) News [2020/07/05] A very nice blog from Towards Data Science introd
 3.9k Jan 5, 2023
3.9k Jan 5, 2023
OpenPose: Real-time multi-person keypoint detection library for body, face, hands, and foot estimation
Build Type Linux MacOS Windows Build Status OpenPose has represented the first real-time multi-person system to jointly detect human body, hand, facia
 25.7k Jan 9, 2023
25.7k Jan 9, 2023