63 Repositories
Python Quanser-Labs-Robotic-Arm Libraries
The AWS Certified SysOps Administrator
The AWS Certified SysOps Administrator – Associate (SOA-C02) exam is intended for system administrators in a cloud operations role who have at least 1 year of hands-on experience with deployment, management, networking, and security on AWS.
 32 Dec 11, 2022
32 Dec 11, 2022

Pytorch implementation of "ARM: Any-Time Super-Resolution Method"
ARM-Net Dependencies Python 3.6 Pytorch 1.7 Results Train Data preprocessing cd data_scripts python extract_subimages_test.py python data_augmentation
 55 Nov 24, 2022
55 Nov 24, 2022
Roblox-Account-Gen - A simple account generator not using paid solving services
Roblox Account Generator Star this if it helped to spread awareness! No 2captcha
 1 Feb 17, 2022
1 Feb 17, 2022
Building Ellee — A GPT-3 and Computer Vision Powered Talking Robotic Teddy Bear With Human Level Conversation Intelligence
Using an object detection and facial recognition system built on MobileNetSSDV2 and Dlib and running on an NVIDIA Jetson Nano, a GPT-3 model, Google Speech Recognition, Amazon Polly and servo motors, I built Ellee - a robotic teddy bear who can move her head and converse naturally.
 24 Oct 26, 2022
24 Oct 26, 2022
A robotic arm that mimics hand movement through MediaPipe tracking.
La-Z-Arm A robotic arm that mimics hand movement through MediaPipe tracking. Hardware NVidia Jetson Nano Sparkfun Pi Servo Shield Micro Servos Webcam
 1 Jun 5, 2022
1 Jun 5, 2022
Axel - 3D printed robotic hands and they controll with Raspberry Pi and Arduino combo
Axel It's our graduation project about 3D printed robotic hands and they control
 0 Feb 14, 2022
0 Feb 14, 2022
A Python command-line utility for validating that the outputs of a given Declarative Form Azure Portal UI JSON template map to the input parameters of a given ARM Deployment Template JSON template
A Python command-line utility for validating that the outputs of a given Declarative Form Azure Portal UI JSON template map to the input parameters of a given ARM Deployment Template JSON template
 1 Feb 3, 2022
1 Feb 3, 2022

An curated collection of awesome resources about networking in cybersecurity
An ongoing curated collection of awesome software, libraries, frameworks, talks & videos, best practices, learning tutorials and important practical resources about networking in cybersecurity
 7 Nov 30, 2022
7 Nov 30, 2022

Look Closer: Bridging Egocentric and Third-Person Views with Transformers for Robotic Manipulation
Look Closer: Bridging Egocentric and Third-Person Views with Transformers for Robotic Manipulation Official PyTorch implementation for the paper Look
 20 Nov 24, 2022
20 Nov 24, 2022
Example Python code for building RPi-controlled robotic systems
RPi Example Code Example Python code for building RPi-controlled robotic systems These python files have been compiled / developed by the Neurobionics
 2 Feb 4, 2022
2 Feb 4, 2022
Tech Resources for Academic Communities
Free tech resources for faculty, students, researchers, life-long learners, and academic community builders for use in tech based courses, workshops, and hackathons.
 2.5k Jan 4, 2023
2.5k Jan 4, 2023
Practical tutorials and labs for TensorFlow used by Nvidia, FFN, CNN, RNN, Kaggle, AE
TensorFlow Tutorial - used by Nvidia Learn TensorFlow from scratch by examples and visualizations with interactive jupyter notebooks. Learn to compete
 1.9k Dec 19, 2022
1.9k Dec 19, 2022

A DUCO (Duino-Coin) miner for GigaDevice ARM boards.
GD32 Duino-Coin Miner Description Contains the firmware and miner software for mining DUCO (Duino-Coin) on GigaDevice GD32 chips. Supported boards GD3
 2 Feb 20, 2022
2 Feb 20, 2022
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning
A modular, open and non-proprietary toolkit for core robotic functionalities by harnessing deep learning Website • About • Installation • Using OpenDR
 304 Dec 28, 2022
304 Dec 28, 2022
A compiler for ARM, X86, MSP430, xtensa and more implemented in pure Python
Introduction The PPCI (Pure Python Compiler Infrastructure) project is a compiler written entirely in the Python programming language. It contains fro
 277 Dec 26, 2022
277 Dec 26, 2022
Full Stack Deep Learning Labs
Full Stack Deep Learning Labs Welcome! Project developed during lab sessions of the Full Stack Deep Learning Bootcamp. We will build a handwriting rec
 1.2k Dec 31, 2022
1.2k Dec 31, 2022

Get a Grip! - A robotic system for remote clinical environments.
Get a Grip! Within clinical environments, sterilization is an essential procedure for disinfecting surgical and medical instruments. For our engineeri
 1 Jan 5, 2022
1 Jan 5, 2022
Quanser Labs Robotic Arm With Python
Quanser-Labs-Robotic-Arm As a team, we programmed a Robotic-Arm in Python on the
 1 Jul 11, 2022
1 Jul 11, 2022
Books, Presentations, Workshops, Notebook Labs, and Model Zoo for Software Engineers and Data Scientists wanting to learn the TF.Keras Machine Learning framework
Books, Presentations, Workshops, Notebook Labs, and Model Zoo for Software Engineers and Data Scientists wanting to learn the TF.Keras Machine Learning framework
 792 Dec 28, 2022
792 Dec 28, 2022
Control-Robot-Arm-using-PS4-Controller - A Robotic Arm based on Raspberry Pi and Arduino that controlled by PS4 Controller
Control-Robot-Arm-using-PS4-Controller You can see all details about this Robot
 5 Jan 1, 2022
5 Jan 1, 2022
ncnn is a high-performance neural network inference framework optimized for the mobile platform
ncnn ncnn is a high-performance neural network inference computing framework optimized for mobile platforms. ncnn is deeply considerate about deployme
 16.2k Jan 5, 2023
16.2k Jan 5, 2023

Designed a system that can efficiently sort recyclables and transfer them to corresponding bins using Python, a Raspberry Pi, and Quanser Labs.
System for Sorting and Recycling Containers - Project 3 Table of contents Overview The challenge Screenshot My process Built with Code snippets What I
 2 Dec 2, 2022
2 Dec 2, 2022

Make a Turtlebot3 follow a figure 8 trajectory and create a robot arm and make it follow a trajectory
HW2 - ME 495 Overview Part 1: Makes the robot move in a figure 8 shape. The robot starts moving when launched on a real turtlebot3 and can be paused a
 0 Oct 21, 2022
0 Oct 21, 2022
This repository includes different versions of the prescribed-time controller as Simulink blocks and MATLAB script codes for engineering applications.
Prescribed-time Control Prescribed-time control (PTC) blocks in Simulink environment, MATLAB R2020b. For more theoretical details, refer to the papers
 1 Mar 11, 2022
1 Mar 11, 2022
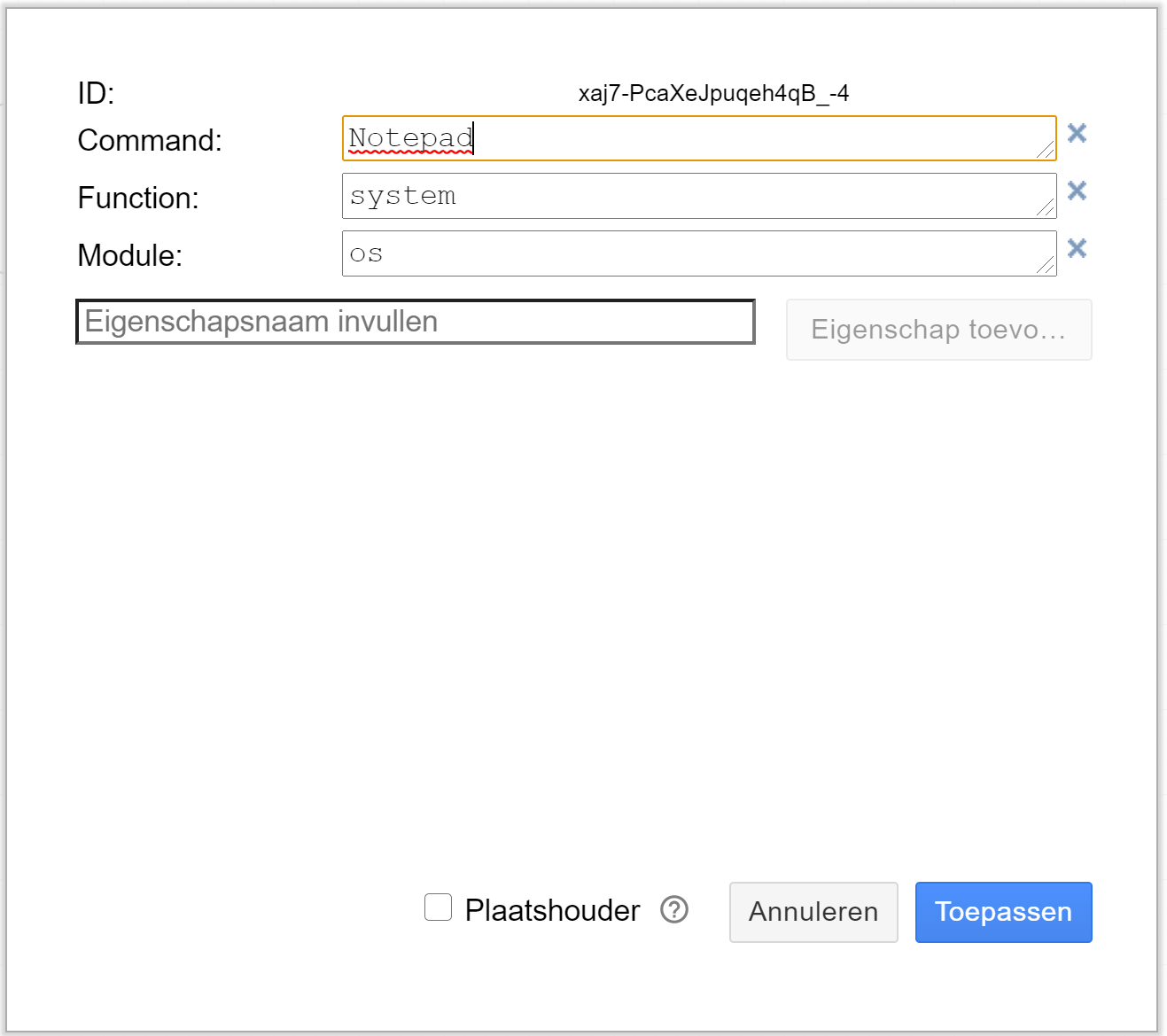
Robotic Process Automation in Windows and Linux by using Driagrams.net BPMN diagrams.
BPMN_RPA Robotic Process Automation in Windows and Linux by using BPMN diagrams. With this Framework you can draw Business Process Model Notation base
 23 Dec 14, 2022
23 Dec 14, 2022
The Fuzzy Labs guide to the universe of open source MLOps
Open Source MLOps This is the Fuzzy Labs guide to the universe of free and open source MLOps tools. Contents What is MLOps, anyway? Data version contr
 352 Dec 29, 2022
352 Dec 29, 2022

An open source library for face detection in images. The face detection speed can reach 1000FPS.
libfacedetection This is an open source library for CNN-based face detection in images. The CNN model has been converted to static variables in C sour
 11.4k Dec 27, 2022
11.4k Dec 27, 2022
High performance Cross-platform Inference-engine, you could run Anakin on x86-cpu,arm, nv-gpu, amd-gpu,bitmain and cambricon devices.
Anakin2.0 Welcome to the Anakin GitHub. Anakin is a cross-platform, high-performance inference engine, which is originally developed by Baidu engineer
 514 Dec 28, 2022
514 Dec 28, 2022

Software framework to enable agile robotic assembly applications.
ConnTact Software framework to enable agile robotic assembly applications. (Connect + Tactile) Overview Installation Development of framework was done
 29 Dec 1, 2022
29 Dec 1, 2022

Keyword spotting on Arm Cortex-M Microcontrollers
Keyword spotting for Microcontrollers This repository consists of the tensorflow models and training scripts used in the paper: Hello Edge: Keyword sp
 1k Dec 30, 2022
1k Dec 30, 2022

A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and motion planning
pybullet-planning (previously ss-pybullet) A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and
 260 Dec 27, 2022
260 Dec 27, 2022
Visual Memorability for Robotic Interestingness via Unsupervised Online Learning (ECCV 2020 Oral and TRO)
Visual Interestingness Refer to the project description for more details. This code based on the following paper. Chen Wang, Yuheng Qiu, Wenshan Wang,
 36 Sep 8, 2022
36 Sep 8, 2022

Robotic Path Planner for a 2D Sphere World
Robotic Path Planner for a 2D Sphere World This repository contains code implementing a robotic path planner in a 2D sphere world with obstacles. The
 1 Nov 19, 2021
1 Nov 19, 2021

Robo Arm :: Rigging is a rigging addon for Blender that helps animating industrial robotic arms.
Robo Arm :: Rigging Robo Arm :: Rigging is a rigging addon for Blender that helps animating industrial robotic arms. It construct serial links(a kind
 2 Nov 18, 2021
2 Nov 18, 2021

PyTorch Code for "Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning"
Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning [Project Page] [Paper] Wenlong Huang1, Igor Mordatch2, Pieter Abbeel1,
 40 Nov 22, 2022
40 Nov 22, 2022

Using some basic methods to show linkages and transformations of robotic arms
roboticArmVisualizer Python GUI application to create custom linkages and adjust joint angles. In the future, I plan to add 2d inverse kinematics solv
 1 Nov 19, 2021
1 Nov 19, 2021
![[NeurIPS 2021] PyTorch Code for Accelerating Robotic Reinforcement Learning with Parameterized Action Primitives](https://github.com/mihdalal/raps/raw/master/readme_files/raps.png)
[NeurIPS 2021] PyTorch Code for Accelerating Robotic Reinforcement Learning with Parameterized Action Primitives
Robot Action Primitives (RAPS) This repository is the official implementation of Accelerating Robotic Reinforcement Learning via Parameterized Action
 55 Dec 27, 2022
55 Dec 27, 2022
cmsis-pack-manager is a python module, Rust crate and command line utility for managing current device information that is stored in many CMSIS PACKs
cmsis-pack-manager cmsis-pack-manager is a python module, Rust crate and command line utility for managing current device information that is stored i
 20 Dec 21, 2022
20 Dec 21, 2022
oracle arm registration script.
oracle_arm oracle arm registration script. 乌龟壳刷ARM脚本 本脚本优点 简单,主机配置好oci,然后下载main.tf即可,不用自己获取各种参数。 运行环境配置 本简单脚本使用python3编写,请自行配置好python3环境和requests库。(高版
 419 Jan 1, 2023
419 Jan 1, 2023

Robotic hamster to give you financial advice
hampp Robotic hamster to give you financial advice. I am not liable for any advice that the hamster gives. Follow at your own peril. Description Hampp
 1 Nov 17, 2021
1 Nov 17, 2021

DiSECt: Differentiable Simulator for Robotic Cutting
DiSECt: Differentiable Simulator for Robotic Cutting Website | Paper | Dataset | Video | Blog post DiSECt is a simulator for the cutting of deformable
 73 Oct 29, 2022
73 Oct 29, 2022

Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.
Robotic Arm Simulation in ROS2 and Gazebo General Overview This repository includes: First, how to simulate a 6DoF Robotic Arm from scratch using GAZE
 12 Jan 2, 2023
12 Jan 2, 2023
A compiler for ARM, X86, MSP430, xtensa and more implemented in pure Python
A compiler for ARM, X86, MSP430, xtensa and more implemented in pure Python
277 Dec 26, 2022
Clackety Keyboards Powered by Python
KMK: Clackety Keyboards Powered by Python KMK is a feature-rich and beginner-friendly firmware for computer keyboards written and configured in Circui
 780 Jan 3, 2023
780 Jan 3, 2023

RGB-stacking 🛑 🟩 🔷 for robotic manipulation
RGB-stacking 🛑 🟩 🔷 for robotic manipulation BLOG | PAPER | VIDEO Beyond Pick-and-Place: Tackling Robotic Stacking of Diverse Shapes, Alex X. Lee*,
 95 Dec 23, 2022
95 Dec 23, 2022

CLIPort: What and Where Pathways for Robotic Manipulation
CLIPort CLIPort: What and Where Pathways for Robotic Manipulation Mohit Shridhar, Lucas Manuelli, Dieter Fox CoRL 2021 CLIPort is an end-to-end imitat
 246 Dec 11, 2022
246 Dec 11, 2022
Programming labs for 6.S060 (Foundations of Computer Security).
6.S060 Labs This git repository contains the code for the labs in 6.S060. In these labs, you will add a series of security features to a photo-sharing
 10 Nov 2, 2022
10 Nov 2, 2022
A Library for Working with Sauce Labs
Robotframework - Sauce Labs Plugin This is a plugin for the SeleniumLibrary to help with using Sauce Labs. This library is a plugin extension of the S
 6 Oct 12, 2021
6 Oct 12, 2021
ml4h is a toolkit for machine learning on clinical data of all kinds including genetics, labs, imaging, clinical notes, and more
ml4h is a toolkit for machine learning on clinical data of all kinds including genetics, labs, imaging, clinical notes, and more
 65 Dec 20, 2022
65 Dec 20, 2022
a fork of the OnionShare software better optimized for lower spec lightweight machines and ARM processors
OnionShare-Optimized A fork of the OnionShare software better optimized for lower spec lightweight machines and ARM processors such as Raspberry Pi or
 4 Aug 5, 2021
4 Aug 5, 2021

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022

A Prometheus exporter for monitoring & analyzing Grafana Labs' technical documentation
grafana-docs-exporter A Prometheus exporter for monitoring & analyzing Grafana Labs' technical documentation Here is the public endpoint.
 5 May 2, 2022
5 May 2, 2022

PyTorch implementation of ARM-Net: Adaptive Relation Modeling Network for Structured Data.
A ready-to-use framework of latest models for structured (tabular) data learning with PyTorch. Applications include recommendation, CRT prediction, healthcare analytics, and etc.
 48 Nov 30, 2022
48 Nov 30, 2022

Attention-driven Robot Manipulation (ARM) which includes Q-attention
Attention-driven Robotic Manipulation (ARM) This codebase is home to: Q-attention: Enabling Efficient Learning for Vision-based Robotic Manipulation I
 84 Dec 29, 2022
84 Dec 29, 2022

This repository contains free labs for setting up an entire workflow and DevOps environment from a real-world perspective in AWS
DevOps-The-Hard-Way-AWS This tutorial contains a full, real-world solution for setting up an environment that is using DevOps technologies and practic
 1.6k Jan 5, 2023
1.6k Jan 5, 2023
simdjson : Parsing gigabytes of JSON per second
JSON is everywhere on the Internet. Servers spend a *lot* of time parsing it. We need a fresh approach. The simdjson library uses commonly available SIMD instructions and microparallel algorithms to parse JSON 4x faster than RapidJSON and 25x faster than JSON for Modern C++.
 16.3k Dec 29, 2022
16.3k Dec 29, 2022
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments.
The ABR Control library is a python package for the control and path planning of robotic arms in real or simulated environments. ABR Control provides API's for the Mujoco, CoppeliaSim (formerly known as VREP), and Pygame simulation environments, and arm configuration files for one, two, and three-joint models, as well as the UR5 and Kinova Jaco 2 arms. Users can also easily extend the package to run with custom arm configurations. ABR Control auto-generates efficient C code for generating the control signals, or uses Mujoco's internal functions to carry out the calculations.
 277 Jan 5, 2023
277 Jan 5, 2023

ManipulaTHOR, a framework that facilitates visual manipulation of objects using a robotic arm
ManipulaTHOR: A Framework for Visual Object Manipulation Kiana Ehsani, Winson Han, Alvaro Herrasti, Eli VanderBilt, Luca Weihs, Eric Kolve, Aniruddha
 65 Dec 30, 2022
65 Dec 30, 2022

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022
JSON Interoperability Vulnerability Labs
JSON Interoperability Vulnerability Labs Description These are the companion labs to my research article "An Exploration of JSON Interoperability Vuln
 168 Dec 25, 2022
168 Dec 25, 2022

Train robotic agents to learn pick and place with deep learning for vision-based manipulation in PyBullet.
Ravens is a collection of simulated tasks in PyBullet for learning vision-based robotic manipulation, with emphasis on pick and place. It features a Gym-like API with 10 tabletop rearrangement tasks, each with (i) a scripted oracle that provides expert demonstrations (for imitation learning), and (ii) reward functions that provide partial credit (for reinforcement learning).
 367 Jan 9, 2023
367 Jan 9, 2023
FERM: A Framework for Efficient Robotic Manipulation
Framework for Efficient Robotic Manipulation FERM is a framework that enables robots to learn tasks within an hour of real time training.
 111 Dec 31, 2022
111 Dec 31, 2022
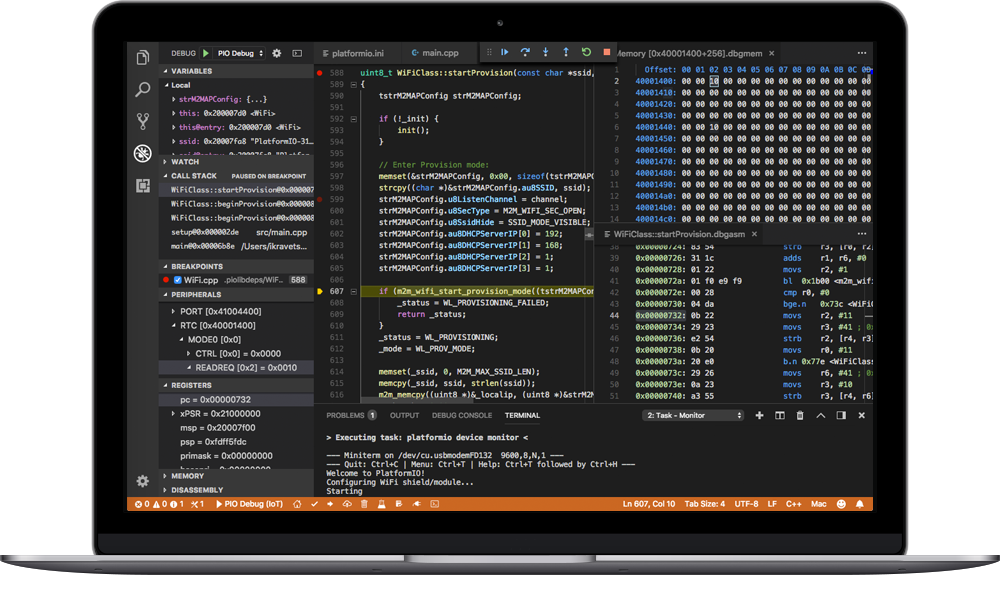
PlatformIO is a professional collaborative platform for embedded development :alien: A place where Developers and Teams have true Freedom! No more vendor lock-in!
PlatformIO Quick Links: Web | PlatformIO IDE | Project Examples | Docs | Donate | Contact Us Social: LinkedIn | Twitter | Facebook | Community Forums
 6.5k Jan 8, 2023
6.5k Jan 8, 2023