607 Repositories
Python light-weight-depth-estimation Libraries

A large-scale video dataset for the training and evaluation of 3D human pose estimation models
ASPset-510 (Australian Sports Pose Dataset) is a large-scale video dataset for the training and evaluation of 3D human pose estimation models. It contains 17 different amateur subjects performing 30 sports-related actions each, for a total of 510 action clips.
 25 Jun 20, 2021
25 Jun 20, 2021
A large-scale video dataset for the training and evaluation of 3D human pose estimation models
ASPset-510 ASPset-510 (Australian Sports Pose Dataset) is a large-scale video dataset for the training and evaluation of 3D human pose estimation mode
36 Oct 30, 2022

CVPR '21: In the light of feature distributions: Moment matching for Neural Style Transfer
In the light of feature distributions: Moment matching for Neural Style Transfer (CVPR 2021) This repository provides code to recreate results present
 49 Oct 13, 2022
49 Oct 13, 2022
Light weight Scripts and Apps for checking availability of Covid Vaccines in India. Notifies when vaccine becomes avialable in your area.
vaccine-checker Light weight Scripts and Apps for checking availability of Covid Vaccines in India. Notifies when vaccine becomes avialable in your ar
 8 Jun 16, 2021
8 Jun 16, 2021

The codes and models in 'Gaze Estimation using Transformer'.
GazeTR We provide the code of GazeTR-Hybrid in "Gaze Estimation using Transformer". We recommend you to use data processing codes provided in GazeHub.
 65 Dec 27, 2022
65 Dec 27, 2022
A highly efficient, fast, powerful and light-weight anime downloader and streamer for your favorite anime.
AnimDL - Download & Stream Your Favorite Anime AnimDL is an incredibly powerful tool for downloading and streaming anime. Core features Abuses the dev
 759 Jan 8, 2023
759 Jan 8, 2023

Tensorflow implementation of MIRNet for Low-light image enhancement
MIRNet Tensorflow implementation of the MIRNet architecture as proposed by Learning Enriched Features for Real Image Restoration and Enhancement. Lanu
 91 Jan 6, 2023
91 Jan 6, 2023

Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals
LapDepth-release This repository is a Pytorch implementation of the paper "Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals" M
 205 Dec 30, 2022
205 Dec 30, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023

Semi-Supervised 3D Hand-Object Poses Estimation with Interactions in Time
Semi Hand-Object Semi-Supervised 3D Hand-Object Poses Estimation with Interactions in Time (CVPR 2021).
 96 Dec 27, 2022
96 Dec 27, 2022
Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation (RA-L/ICRA 2020)
Aerial Depth Completion This work is described in the letter "Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation", by Lucas
 70 Dec 22, 2022
70 Dec 22, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

InsightFace: 2D and 3D Face Analysis Project on MXNet and PyTorch
InsightFace: 2D and 3D Face Analysis Project on MXNet and PyTorch
 13.2k Jan 6, 2023
13.2k Jan 6, 2023
![[CVPR 2021] Monocular depth estimation using wavelets for efficiency](https://github.com/nianticlabs/wavelet-monodepth/raw/main/assets/combo_kitti.gif)
[CVPR 2021] Monocular depth estimation using wavelets for efficiency
Single Image Depth Prediction with Wavelet Decomposition Michaël Ramamonjisoa, Michael Firman, Jamie Watson, Vincent Lepetit and Daniyar Turmukhambeto
 205 Jan 2, 2023
205 Jan 2, 2023
Camera calibration & 3D pose estimation tools for AcinoSet
AcinoSet: A 3D Pose Estimation Dataset and Baseline Models for Cheetahs in the Wild Daniel Joska, Liam Clark, Naoya Muramatsu, Ricardo Jericevich, Fre
 42 Nov 16, 2022
42 Nov 16, 2022

Pytorch implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Detection"
M-LSD: Towards Light-weight and Real-time Line Segment Detection Pytorch implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Det
 123 Jan 4, 2023
123 Jan 4, 2023

Python implementation of the Density Line Chart by Moritz & Fisher.
PyDLC - Density Line Charts with Python Python implementation of the Density Line Chart (Moritz & Fisher, 2018) to visualize large collections of time
 10 Jan 6, 2023
10 Jan 6, 2023

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging This repository contains an implementation
 1.1k Jan 2, 2023
1.1k Jan 2, 2023

Official Tensorflow implementation of "M-LSD: Towards Light-weight and Real-time Line Segment Detection"
M-LSD: Towards Light-weight and Real-time Line Segment Detection Official Tensorflow implementation of "M-LSD: Towards Light-weight and Real-time Line
 357 Jan 4, 2023
357 Jan 4, 2023
Package pyVHR is a comprehensive framework for studying methods of pulse rate estimation relying on remote photoplethysmography (rPPG)
Package pyVHR (short for Python framework for Virtual Heart Rate) is a comprehensive framework for studying methods of pulse rate estimation relying on remote photoplethysmography (rPPG)
 261 Jan 3, 2023
261 Jan 3, 2023

Official repository for "Action-Based Conversations Dataset: A Corpus for Building More In-Depth Task-Oriented Dialogue Systems"
Action-Based Conversations Dataset (ABCD) This respository contains the code and data for ABCD (Chen et al., 2021) Introduction Whereas existing goal-
 49 Oct 9, 2022
49 Oct 9, 2022
Official code repository of the paper Learning Associative Inference Using Fast Weight Memory by Schlag et al.
Learning Associative Inference Using Fast Weight Memory This repository contains the offical code for the paper Learning Associative Inference Using F
 18 Oct 12, 2022
18 Oct 12, 2022

Official implementation of the network presented in the paper "M4Depth: A motion-based approach for monocular depth estimation on video sequences"
M4Depth This is the reference TensorFlow implementation for training and testing depth estimation models using the method described in M4Depth: A moti
 76 Jan 3, 2023
76 Jan 3, 2023

Python and C++ implementation of "MarkerPose: Robust real-time planar target tracking for accurate stereo pose estimation". Accepted at LXCV @ CVPR 2021.
MarkerPose: Robust real-time planar target tracking for accurate stereo pose estimation This is a PyTorch and LibTorch implementation of MarkerPose: a
 47 Nov 18, 2022
47 Nov 18, 2022
The implemention of Video Depth Estimation by Fusing Flow-to-Depth Proposals
Flow-to-depth (FDNet) video-depth-estimation This is the implementation of paper Video Depth Estimation by Fusing Flow-to-Depth Proposals Jiaxin Xie,
 32 Jun 14, 2022
32 Jun 14, 2022

Official implementation of "One-Shot Voice Conversion with Weight Adaptive Instance Normalization".
One-Shot Voice Conversion with Weight Adaptive Instance Normalization By Shengjie Huang, Yanyan Xu*, Dengfeng Ke*, Mingjie Chen, Thomas Hain. This rep
 31 Dec 7, 2022
31 Dec 7, 2022

Fashion Landmark Estimation with HRNet
HRNet for Fashion Landmark Estimation (Modified from deep-high-resolution-net.pytorch) Introduction This code applies the HRNet (Deep High-Resolution
 91 Dec 26, 2022
91 Dec 26, 2022
Estimation of human density in a closed space using deep learning.
Siemens HOLLZOF challenge - Human Density Estimation Add project description here. Installing Dependencies: Install Python3 either system-wide, user-w
 3 Aug 8, 2021
3 Aug 8, 2021

Drone-based Joint Density Map Estimation, Localization and Tracking with Space-Time Multi-Scale Attention Network
DroneCrowd Paper Detection, Tracking, and Counting Meets Drones in Crowds: A Benchmark. Introduction This paper proposes a space-time multi-scale atte
 98 Nov 16, 2022
98 Nov 16, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022

FastFace: Lightweight Face Detection Framework
Light Face Detection using PyTorch Lightning
 75 Dec 5, 2022
75 Dec 5, 2022

Face Detection & Age Gender & Expression & Recognition
Face Detection & Age Gender & Expression & Recognition
 188 Dec 28, 2022
188 Dec 28, 2022

Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation
CorDA Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation Prerequisite Please create and activate the follo
 60 Nov 30, 2022
60 Nov 30, 2022
Incorporating Transformer and LSTM to Kalman Filter with EM algorithm
Deep learning based state estimation: incorporating Transformer and LSTM to Kalman Filter with EM algorithm Overview Kalman Filter requires the true p
 57 Dec 27, 2022
57 Dec 27, 2022

Location-Sensitive Visual Recognition with Cross-IOU Loss
The trained models are temporarily unavailable, but you can train the code using reasonable computational resource. Location-Sensitive Visual Recognit
 146 Dec 25, 2022
146 Dec 25, 2022

Official Pytorch implementation of "Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video", CVPR 2021
TCMR: Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video Qualtitative result Paper teaser video Introduction This r
 215 Jan 6, 2023
215 Jan 6, 2023

Code and datasets for the paper "Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction" (RA-L, 2021)
Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction This is the code for the paper Combining E
 69 Dec 26, 2022
69 Dec 26, 2022
DiffQ performs differentiable quantization using pseudo quantization noise. It can automatically tune the number of bits used per weight or group of weights, in order to achieve a given trade-off between model size and accuracy.
Differentiable Model Compression via Pseudo Quantization Noise DiffQ performs differentiable quantization using pseudo quantization noise. It can auto
 145 Dec 30, 2022
145 Dec 30, 2022

SNE-RoadSeg in PyTorch, ECCV 2020
SNE-RoadSeg Introduction This is the official PyTorch implementation of SNE-RoadSeg: Incorporating Surface Normal Information into Semantic Segmentati
 242 Dec 20, 2022
242 Dec 20, 2022

AdelaiDepth is an open source toolbox for monocular depth prediction.
AdelaiDepth is an open source toolbox for monocular depth prediction.
 743 Jan 1, 2023
743 Jan 1, 2023

This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution Network.
Lite-HRNet: A Lightweight High-Resolution Network Introduction This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution
 675 Dec 25, 2022
675 Dec 25, 2022

This repository contains a pytorch implementation of "StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision".
StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision | Project Page | Paper | This repository contains a pytorch implementation of "St
 87 Dec 9, 2022
87 Dec 9, 2022

Code for "Single-view robot pose and joint angle estimation via render & compare", CVPR 2021 (Oral).
Single-view robot pose and joint angle estimation via render & compare Yann Labbé, Justin Carpentier, Mathieu Aubry, Josef Sivic CVPR: Conference on C
 51 Oct 14, 2022
51 Oct 14, 2022

WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose
WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose Yijun Zhou and James Gregson - BMVC2020 Abstract: We present an end-to-end head-pos
 368 Dec 26, 2022
368 Dec 26, 2022
Just Go with the Flow: Self-Supervised Scene Flow Estimation
Just Go with the Flow: Self-Supervised Scene Flow Estimation Code release for the paper Just Go with the Flow: Self-Supervised Scene Flow Estimation,
 50 Nov 22, 2022
50 Nov 22, 2022
TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Prediction.
TalkNet 2 [WIP] TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Predictio
 69 Dec 17, 2022
69 Dec 17, 2022
(Arxiv 2021) NeRF--: Neural Radiance Fields Without Known Camera Parameters
NeRF--: Neural Radiance Fields Without Known Camera Parameters Project Page | Arxiv | Colab Notebook | Data Zirui Wang¹, Shangzhe Wu², Weidi Xie², Min
 411 Dec 26, 2022
411 Dec 26, 2022
Simple, light-weight config handling through python data classes with to/from JSON serialization/deserialization.
Simple but maybe too simple config management through python data classes. We use it for machine learning.
 67 Nov 29, 2022
67 Nov 29, 2022

CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering" official PyTorch implementation.
LED2-Net This is PyTorch implementation of our CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering". Y
 83 Jan 4, 2023
83 Jan 4, 2023
![[CVPRW 21]](https://github.com/VITA-Group/BNN_NoBN/raw/main/Figs/res.png)
[CVPRW 21] "BNN - BN = ? Training Binary Neural Networks without Batch Normalization", Tianlong Chen, Zhenyu Zhang, Xu Ouyang, Zechun Liu, Zhiqiang Shen, Zhangyang Wang
BNN - BN = ? Training Binary Neural Networks without Batch Normalization Codes for this paper BNN - BN = ? Training Binary Neural Networks without Bat
 40 Dec 30, 2022
40 Dec 30, 2022
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks. Bayesian-Torch is designed to be flexible and seamless in extending a deterministic deep neural network architecture to corresponding Bayesian form by simply replacing the deterministic layers with Bayesian layers.
 210 Jan 4, 2023
210 Jan 4, 2023

Change between dark/light mode depending on the ambient light intensity
svart Change between dark/light mode depending on the ambient light intensity Installation Install using pip $ python3 -m pip install --user svart Ins
 169 Nov 26, 2022
169 Nov 26, 2022
OpenMMLab Pose Estimation Toolbox and Benchmark.
Introduction English | 简体中文 MMPose is an open-source toolbox for pose estimation based on PyTorch. It is a part of the OpenMMLab project. The master b
 2.8k Dec 31, 2022
2.8k Dec 31, 2022
Sandbox for training deep learning networks
Deep learning networks This repo is used to research convolutional networks primarily for computer vision tasks. For this purpose, the repo contains (
 2.7k Jan 1, 2023
2.7k Jan 1, 2023

(NeurIPS 2020) Wasserstein Distances for Stereo Disparity Estimation
Wasserstein Distances for Stereo Disparity Estimation Accepted in NeurIPS 2020 as Spotlight. [Project Page] Wasserstein Distances for Stereo Disparity
 92 Dec 12, 2022
92 Dec 12, 2022

From Fidelity to Perceptual Quality: A Semi-Supervised Approach for Low-Light Image Enhancement (CVPR'2020)
Under-exposure introduces a series of visual degradation, i.e. decreased visibility, intensive noise, and biased color, etc. To address these problems, we propose a novel semi-supervised learning approach for low-light image enhancement.
 117 Jan 3, 2023
117 Jan 3, 2023

Categorical Depth Distribution Network for Monocular 3D Object Detection
CaDDN CaDDN is a monocular-based 3D object detection method. This repository is based off of [OpenPCDet]. Categorical Depth Distribution Network for M
 289 Jan 5, 2023
289 Jan 5, 2023

Code for HLA-Face: Joint High-Low Adaptation for Low Light Face Detection (CVPR21)
HLA-Face: Joint High-Low Adaptation for Low Light Face Detection The official PyTorch implementation for HLA-Face: Joint High-Low Adaptation for Low L
 77 Dec 8, 2022
77 Dec 8, 2022
POT : Python Optimal Transport
This open source Python library provide several solvers for optimization problems related to Optimal Transport for signal, image processing and machine learning.
 1.7k Jan 4, 2023
1.7k Jan 4, 2023

A light-weight, versatile XYZ tile server, built with Flask and Rasterio :earth_africa:
Terracotta is a pure Python tile server that runs as a WSGI app on a dedicated webserver or as a serverless app on AWS Lambda. It is built on a modern
 531 Dec 28, 2022
531 Dec 28, 2022

《Where am I looking at? Joint Location and Orientation Estimation by Cross-View Matching》(CVPR 2020)
This contains the codes for cross-view geo-localization method described in: Where am I looking at? Joint Location and Orientation Estimation by Cross-View Matching, CVPR2020.
 41 Oct 27, 2022
41 Oct 27, 2022

Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation
Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation This is the official repository for our paper Neural Reprojection Error
 78 Dec 1, 2022
78 Dec 1, 2022
This is an official implementation of our CVPR 2021 paper "Bottom-Up Human Pose Estimation Via Disentangled Keypoint Regression" (https://arxiv.org/abs/2104.02300)
Bottom-Up Human Pose Estimation Via Disentangled Keypoint Regression Introduction In this paper, we are interested in the bottom-up paradigm of estima
367 Dec 27, 2022

Facial Action Unit Intensity Estimation via Semantic Correspondence Learning with Dynamic Graph Convolution
FAU Implementation of the paper: Facial Action Unit Intensity Estimation via Semantic Correspondence Learning with Dynamic Graph Convolution. Yingruo
 78 Nov 29, 2022
78 Nov 29, 2022

Repository for the paper "PoseAug: A Differentiable Pose Augmentation Framework for 3D Human Pose Estimation", CVPR 2021.
PoseAug: A Differentiable Pose Augmentation Framework for 3D Human Pose Estimation Code repository for the paper: PoseAug: A Differentiable Pose Augme
 328 Dec 17, 2022
328 Dec 17, 2022
Code for "LoFTR: Detector-Free Local Feature Matching with Transformers", CVPR 2021
LoFTR: Detector-Free Local Feature Matching with Transformers Project Page | Paper LoFTR: Detector-Free Local Feature Matching with Transformers Jiami
 1.4k Jan 4, 2023
1.4k Jan 4, 2023

Simple Pose: Rethinking and Improving a Bottom-up Approach for Multi-Person Pose Estimation
SimplePose Code and pre-trained models for our paper, “Simple Pose: Rethinking and Improving a Bottom-up Approach for Multi-Person Pose Estimation”, a
 256 Dec 24, 2022
256 Dec 24, 2022
Isn't that what we all want? Our money to go many? Well that's what this strategy hopes to do for you! By giving you/HyperOpt a lot of signals to alter the weight from.
#################################################################################### ####
 966 Dec 24, 2022
966 Dec 24, 2022

The project is an official implementation of our paper "3D Human Pose Estimation with Spatial and Temporal Transformers".
3D Human Pose Estimation with Spatial and Temporal Transformers This repo is the official implementation for 3D Human Pose Estimation with Spatial and
 363 Dec 28, 2022
363 Dec 28, 2022
Code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction
Official PyTorch code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction. Guanglei Yang, Hao Tang, Mingli Ding, Nicu Sebe,
 152 Dec 16, 2022
152 Dec 16, 2022
Light, simple RPC framework for Python
Agileutil是一个Python3 RPC框架。基于微服务架构,封装了rpc/http/orm/log等常用组件,提供了简洁的API,开发者可以很快上手,快速进行业务开发。
 16 Nov 22, 2022
16 Nov 22, 2022
Python Kalman filtering and optimal estimation library. Implements Kalman filter, particle filter, Extended Kalman filter, Unscented Kalman filter, g-h (alpha-beta), least squares, H Infinity, smoothers, and more. Has companion book 'Kalman and Bayesian Filters in Python'.
FilterPy - Kalman filters and other optimal and non-optimal estimation filters in Python. NOTE: Imminent drop of support of Python 2.7, 3.4. See secti
 2.5k Dec 30, 2022
2.5k Dec 30, 2022

Scikit-learn compatible estimation of general graphical models
skggm : Gaussian graphical models using the scikit-learn API In the last decade, learning networks that encode conditional independence relationships
 213 Jan 2, 2023
213 Jan 2, 2023

Implementation of "Meta-rPPG: Remote Heart Rate Estimation Using a Transductive Meta-Learner"
Meta-rPPG: Remote Heart Rate Estimation Using a Transductive Meta-Learner This repository is the official implementation of Meta-rPPG: Remote Heart Ra
 137 Dec 13, 2022
137 Dec 13, 2022
git git《Transformer Meets Tracker: Exploiting Temporal Context for Robust Visual Tracking》(CVPR 2021) GitHub:git2] 《Masksembles for Uncertainty Estimation》(CVPR 2021) GitHub:git3]
Transformer Meets Tracker: Exploiting Temporal Context for Robust Visual Tracking Ning Wang, Wengang Zhou, Jie Wang, and Houqiang Li Accepted by CVPR
 236 Dec 22, 2022
236 Dec 22, 2022

Linear Prediction Coefficients estimation from mel-spectrogram implemented in Python based on Levinson-Durbin algorithm.
LPC_for_TTS Linear Prediction Coefficients estimation from mel-spectrogram implemented in Python based on Levinson-Durbin algorithm. 基于Levinson-Durbin
 58 Nov 17, 2022
58 Nov 17, 2022
Monocular Depth Estimation - Weighted-average prediction from multiple pre-trained depth estimation models
merged_depth runs (1) AdaBins, (2) DiverseDepth, (3) MiDaS, (4) SGDepth, and (5) Monodepth2, and calculates a weighted-average per-pixel absolute dept
 39 Nov 21, 2022
39 Nov 21, 2022
![[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.](https://github.com/ethnhe/FFB6D/raw/master/figs/FFB6D_overview.png)
[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.
FFB6D This is the official source code for the CVPR2021 Oral work, FFB6D: A Full Flow Biderectional Fusion Network for 6D Pose Estimation. (Arxiv) Tab
 201 Dec 28, 2022
201 Dec 28, 2022
Bottom-up Human Pose Estimation
Introduction This is the official code of Rethinking the Heatmap Regression for Bottom-up Human Pose Estimation. This paper has been accepted to CVPR2
 108 Dec 1, 2022
108 Dec 1, 2022

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022

Deep Dual Consecutive Network for Human Pose Estimation (CVPR2021)
Deep Dual Consecutive Network for Human Pose Estimation (CVPR2021) Introduction This is the official code of Deep Dual Consecutive Network for Human P
 295 Dec 29, 2022
295 Dec 29, 2022

Official PyTorch Implementation of Unsupervised Learning of Scene Flow Estimation Fusing with Local Rigidity
UnRigidFlow This is the official PyTorch implementation of UnRigidFlow (IJCAI2019). Here are two sample results (~10MB gif for each) of our unsupervis
 28 Nov 16, 2022
28 Nov 16, 2022

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022

Object Depth via Motion and Detection Dataset
ODMD Dataset ODMD is the first dataset for learning Object Depth via Motion and Detection. ODMD training data are configurable and extensible, with ea
 172 Dec 21, 2022
172 Dec 21, 2022
POT : Python Optimal Transport
POT: Python Optimal Transport This open source Python library provide several solvers for optimization problems related to Optimal Transport for signa
1.7k Dec 31, 2022
Scikit-learn compatible estimation of general graphical models
skggm : Gaussian graphical models using the scikit-learn API In the last decade, learning networks that encode conditional independence relationships
213 Jan 2, 2023

Gluon CV Toolkit
Gluon CV Toolkit | Installation | Documentation | Tutorials | GluonCV provides implementations of the state-of-the-art (SOTA) deep learning models in
 5.4k Jan 6, 2023
5.4k Jan 6, 2023

ICRA 2021 "Towards Precise and Efficient Image Guided Depth Completion"
PENet: Precise and Efficient Depth Completion This repo is the PyTorch implementation of our paper to appear in ICRA2021 on "Towards Precise and Effic
 232 Dec 25, 2022
232 Dec 25, 2022
3D Vision functions with end-to-end support for deep learning developers, written in Ivy.
Ivy vision focuses predominantly on 3D vision, with functions for camera geometry, image projections, co-ordinate frame transformations, forward warping, inverse warping, optical flow, depth triangulation, voxel grids, point clouds, signed distance functions, and others. Check out the docs for more info!
 61 Dec 29, 2022
61 Dec 29, 2022
Pre-trained NFNets with 99% of the accuracy of the official paper
NFNet Pytorch Implementation This repo contains pretrained NFNet models F0-F6 with high ImageNet accuracy from the paper High-Performance Large-Scale
 133 Dec 9, 2022
133 Dec 9, 2022

Human head pose estimation using Keras over TensorFlow.
RealHePoNet: a robust single-stage ConvNet for head pose estimation in the wild.
 71 Jan 5, 2023
71 Jan 5, 2023
Storchastic is a PyTorch library for stochastic gradient estimation in Deep Learning
Storchastic is a PyTorch library for stochastic gradient estimation in Deep Learning
 140 Dec 30, 2022
140 Dec 30, 2022

Code for "Learning to Segment Rigid Motions from Two Frames".
rigidmask Code for "Learning to Segment Rigid Motions from Two Frames". ** This is a partial release with inference and evaluation code.
 157 Nov 21, 2022
157 Nov 21, 2022
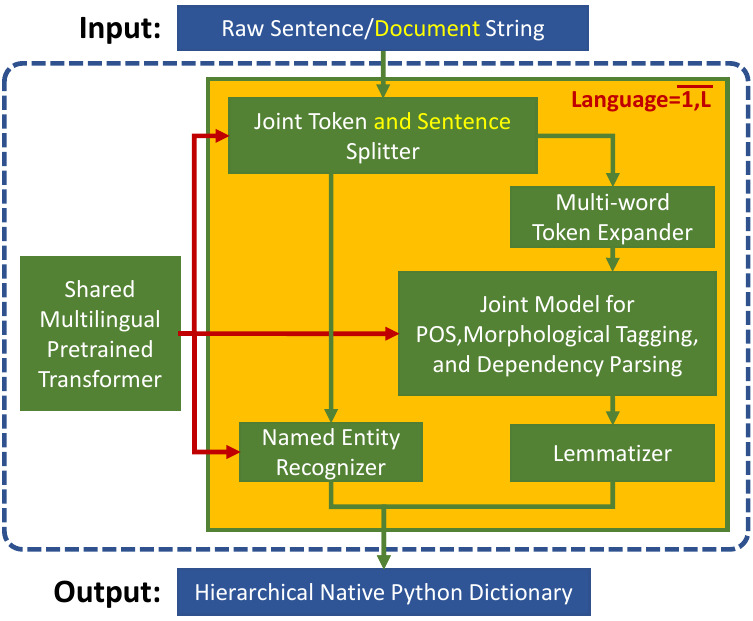
Trankit is a Light-Weight Transformer-based Python Toolkit for Multilingual Natural Language Processing
Trankit: A Light-Weight Transformer-based Python Toolkit for Multilingual Natural Language Processing Trankit is a light-weight Transformer-based Pyth
 652 Jan 6, 2023
652 Jan 6, 2023

⚾🤖⚾ Automatic baseball pitching overlay in realtime
⚾ Automatically overlaying pitch motion and trajectory with machine learning! This project takes your baseball pitching clips and automatically genera
 240 Dec 5, 2022
240 Dec 5, 2022

img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation
img2pose: Face Alignment and Detection via 6DoF, Face Pose Estimation Figure 1: We estimate the 6DoF rigid transformation of a 3D face (rendered in si
 519 Dec 29, 2022
519 Dec 29, 2022

Universal Xiaomi MIoT integration for Home Assistant
Xiaomi MIoT Raw 简体中文 | English MIoT 协议是小米智能家居从 2018 年起推行的智能设备通信协议规范,此后凡是可接入米家的设备均通过此协议进行通信。此插件按照 MIoT 协议规范与设备通信,实现对设备的状态读取及控制。
 1.9k Jan 2, 2023
1.9k Jan 2, 2023

AIST++ API This repo contains starter code for using the AIST++ dataset.
AIST++ API This repo contains starter code for using the AIST++ dataset. To download the dataset or explore details of this dataset, please go to our
 260 Dec 30, 2022
260 Dec 30, 2022
[ECCV 2020] Reimplementation of 3DDFAv2, including face mesh, head pose, landmarks, and more.
Stable Head Pose Estimation and Landmark Regression via 3D Dense Face Reconstruction Reimplementation of (ECCV 2020) Towards Fast, Accurate and Stable
 221 Dec 30, 2022
221 Dec 30, 2022