542 Repositories
Python point-cloud-completion Libraries

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

RESTler is the first stateful REST API fuzzing tool for automatically testing cloud services through their REST APIs and finding security and reliability bugs in these services.
RESTler is the first stateful REST API fuzzing tool for automatically testing cloud services through their REST APIs and finding security and reliability bugs in these services.
 1.8k Jan 4, 2023
1.8k Jan 4, 2023

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022
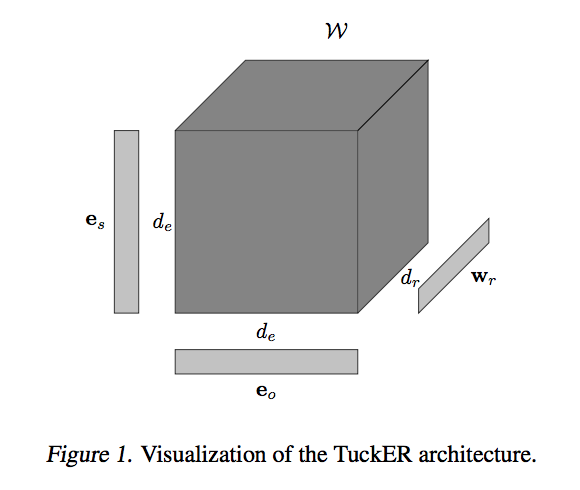
TuckER: Tensor Factorization for Knowledge Graph Completion
TuckER: Tensor Factorization for Knowledge Graph Completion This codebase contains PyTorch implementation of the paper: TuckER: Tensor Factorization f
 296 Dec 6, 2022
296 Dec 6, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022
Empirical Study of Transformers for Source Code & A Simple Approach for Handling Out-of-Vocabulary Identifiers in Deep Learning for Source Code
Transformers for variable misuse, function naming and code completion tasks The official PyTorch implementation of: Empirical Study of Transformers fo
 56 Nov 15, 2022
56 Nov 15, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022

Visius Heimdall is a tool that checks for risks on your cloud infrastructure
Heimdall Cloud Checker 🇧🇷 About Visius is a Brazilian cybersecurity startup that follows the signs of the crimson thunder ;) 🎸 ! As we value open s
 48 Jun 20, 2022
48 Jun 20, 2022
🤖 A Python library for learning and evaluating knowledge graph embeddings
PyKEEN PyKEEN (Python KnowlEdge EmbeddiNgs) is a Python package designed to train and evaluate knowledge graph embedding models (incorporating multi-m
 1.1k Jan 9, 2023
1.1k Jan 9, 2023
WILSON Cloud Respwnder is a Web Interaction Logger Sending Out Notifications with the ability to serve custom content in order to appropriately respond to client-issued requests.
WILSON Cloud Respwnder What is this? WILSON Cloud Respwnder is a Web Interaction Logger Sending Out Notifications (WILSON) with the ability to serve c
 48 Oct 31, 2022
48 Oct 31, 2022
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
 90 Dec 29, 2022
90 Dec 29, 2022

Azure Cloud Advocates at Microsoft are pleased to offer a 12-week, 24-lesson curriculum all about Machine Learning
Azure Cloud Advocates at Microsoft are pleased to offer a 12-week, 24-lesson curriculum all about Machine Learning
43.4k Jan 4, 2023

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

Udacity Suse Cloud Native Foundations Scholarship Course Walkthrough
SUSE Cloud Native Foundations Scholarship Udacity is collaborating with SUSE, a global leader in true open source solutions, to empower developers and
 34 Oct 18, 2022
34 Oct 18, 2022

Splunk Add-On to collect audit log events from Github Enterprise Cloud
GitHub Enterprise Audit Log Monitoring Splunk modular input plugin to fetch the enterprise audit log from GitHub Enterprise Support for modular inputs
 12 Aug 18, 2022
12 Aug 18, 2022

This repo is a PyTorch implementation for Paper "Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds"
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds This repository is a PyTorch implementation for paper: Uns
 42 Dec 9, 2022
42 Dec 9, 2022

CloudProxy is to hide your scrapers IP behind the cloud
Hide your scrapers IP behind the cloud. Provision proxy servers across different cloud providers to improve your scraping success.
 1.1k Jan 2, 2023
1.1k Jan 2, 2023
A repository containing useful resources needed to complete the SUSE Scholarship Challenge #UdacitySUSEScholars #poweredbySUSE
SUSE-udacity-cloud-native-scholarship A repository containing useful resources needed to complete the SUSE Scholarship Challenge #UdacitySUSEScholars
 11 Dec 2, 2021
11 Dec 2, 2021
Sublime Text 2/3 style auto completion for ST4
Hippie Autocompletion Sublime Text 2/3 style auto completion for ST4: cycle through words, do not show popup. Simply hit Tab to insert completion, hit
 20 May 19, 2022
20 May 19, 2022
A python to scratch API connector. Can fetch data from the API and send it back in cloud variables.
Scratch2py Scratch2py or S2py is a easy to use, versatile tool to communicate with the Scratch API Based of scratchclient by Raihan142857 Installation
 20 Jun 18, 2022
20 Jun 18, 2022

Code for "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" @ICRA2021
CloudAAE This is an tensorflow implementation of "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" Files log:
 35 Nov 14, 2022
35 Nov 14, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
A new GCN model for Point Cloud Analyse
Pytorch Implementation of PointNet and PointNet++ This repo is implementation for VA-GCN in pytorch. Classification (ModelNet10/40) Data Preparation D
 12 Feb 2, 2022
12 Feb 2, 2022

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 4, 2023
115 Jan 4, 2023

RGB-D Local Implicit Function for Depth Completion of Transparent Objects
RGB-D Local Implicit Function for Depth Completion of Transparent Objects [Project Page] [Paper] Overview This repository maintains the official imple
 43 Dec 12, 2022
43 Dec 12, 2022
A Python package for floating-point binary fractions. Do math in base 2!
An implementation of a floating-point binary fractions class and module in Python. Work with binary fractions and binary floats with ease!
 10 Oct 29, 2022
10 Oct 29, 2022
Jina allows you to build deep learning-powered search-as-a-service in just minutes
Cloud-native neural search framework for any kind of data
 17k Dec 31, 2022
17k Dec 31, 2022

Cloud Native sample microservices showcasing Full Stack Observability using AppDynamics and ThousandEyes
Cloud Native Sample Bookinfo App Observability Bookinfo is a sample application composed of four Microservices written in different languages.
 13 Jul 21, 2022
13 Jul 21, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022
Using pretrained language models for biomedical knowledge graph completion.
LMs for biomedical KG completion This repository contains code to run the experiments described in: Scientific Language Models for Biomedical Knowledg
 41 Nov 30, 2022
41 Nov 30, 2022

A comprehensive reference for all topics related to building and maintaining microservices
This pandect (πανδέκτης is Ancient Greek for encyclopedia) was created to help you find and understand almost anything related to Microservices that i
 64 Dec 9, 2022
64 Dec 9, 2022

Implementation of the "Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos" paper.
Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos Introduction Point cloud videos exhibit irregularities and lack of or
 101 Dec 29, 2022
101 Dec 29, 2022
Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation (RA-L/ICRA 2020)
Aerial Depth Completion This work is described in the letter "Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation", by Lucas
 70 Dec 22, 2022
70 Dec 22, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

HNECV: Heterogeneous Network Embedding via Cloud model and Variational inference
HNECV This repository provides a reference implementation of HNECV as described in the paper: HNECV: Heterogeneous Network Embedding via Cloud model a
 4 Jun 28, 2022
4 Jun 28, 2022

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023

3D AffordanceNet is a 3D point cloud benchmark consisting of 23k shapes from 23 semantic object categories, annotated with 56k affordance annotations and covering 18 visual affordance categories.
3D AffordanceNet This repository is the official experiment implementation of 3D AffordanceNet benchmark. 3D AffordanceNet is a 3D point cloud benchma
 49 Dec 1, 2022
49 Dec 1, 2022

Registration Loss Learning for Deep Probabilistic Point Set Registration
RLLReg This repository contains a Pytorch implementation of the point set registration method RLLReg. Details about the method can be found in the 3DV
 35 Nov 2, 2022
35 Nov 2, 2022

Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving
SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving Abstract In this paper, we introduce SalsaNext f
 308 Jan 4, 2023
308 Jan 4, 2023
Orchest is a browser based IDE for Data Science.
Orchest is a browser based IDE for Data Science. It integrates your favorite Data Science tools out of the box, so you don’t have to. The application is easy to use and can run on your laptop as well as on a large scale cloud cluster.
 3.6k Jan 9, 2023
3.6k Jan 9, 2023
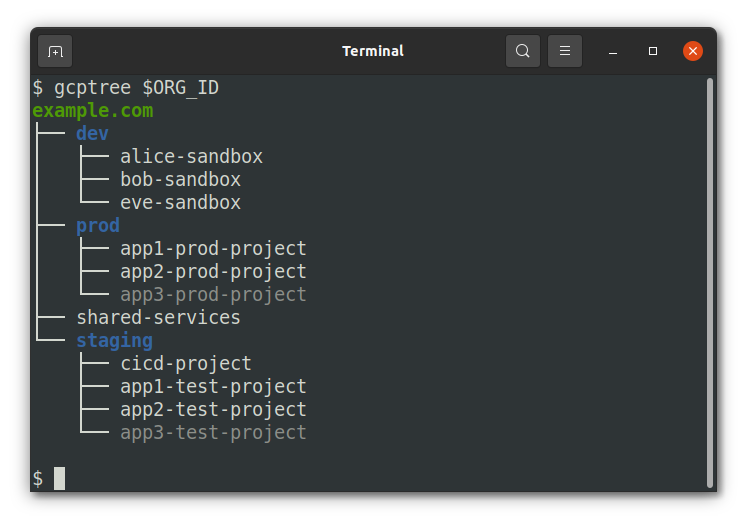
gcptree - Like the unix tree command but for GCP Org Heirarchy
gcptree Like the unix tree command but for GCP Org Heirarchy. For a note on coloring, the org node is green, folders and blue, and projects that are n
 25 Sep 6, 2022
25 Sep 6, 2022
source code the paper Fast and Robust Iterative Closet Point.
Fast-Robust-ICP This repository includes the source code the paper Fast and Robust Iterative Closet Point. Authors: Juyong Zhang, Yuxin Yao, Bailin De
 320 Dec 28, 2022
320 Dec 28, 2022

Cloud-native, data onboarding architecture for the Google Cloud Public Datasets program
Public Datasets Pipelines Cloud-native, data pipeline architecture for onboarding datasets to the Google Cloud Public Datasets Program. Overview Requi
 109 Dec 30, 2022
109 Dec 30, 2022
Accompanying code for our paper "Point Cloud Audio Processing"
Point Cloud Audio Processing Krishna Subramani1, Paris Smaragdis1 1UIUC Paper For the necessary libraries/prerequisites, please use conda/anaconda to
 17 Nov 17, 2022
17 Nov 17, 2022

This is a repository for the Duke University Cloud Computing course project on Serveless Data Engineering Pipeline. For this project, I recreated the below pipeline.
AWS Data Engineering Pipeline This is a repository for the Duke University Cloud Computing course project on Serverless Data Engineering Pipeline. For
 15 Jul 28, 2021
15 Jul 28, 2021
Stream Framework is a Python library, which allows you to build news feed, activity streams and notification systems using Cassandra and/or Redis. The authors of Stream-Framework also provide a cloud service for feed technology:
Stream Framework Activity Streams & Newsfeeds Stream Framework is a Python library which allows you to build activity streams & newsfeeds using Cassan
 4.7k Jan 2, 2023
4.7k Jan 2, 2023

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022
Deep Compression for Dense Point Cloud Maps.
DEPOCO This repository implements the algorithms described in our paper Deep Compression for Dense Point Cloud Maps. How to get started (using Docker)
67 Dec 6, 2022
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM (processing)
 17 May 16, 2021
17 May 16, 2021
framework providing automatic constructions of vulnerable infrastructures
中文 | English 1 Introduction Metarget = meta- + target, a framework providing automatic constructions of vulnerable infrastructures, used to deploy sim
 685 Dec 28, 2022
685 Dec 28, 2022
AWS Auto Inventory allows you to quickly and easily generate inventory reports of your AWS resources.
Photo by Denny Müller on Unsplash AWS Automated Inventory ( aws-auto-inventory ) Automates creation of detailed inventories from AWS resources. Table
 123 Dec 26, 2022
123 Dec 26, 2022
Ethereum ETL lets you convert blockchain data into convenient formats like CSVs and relational databases.
Python scripts for ETL (extract, transform and load) jobs for Ethereum blocks, transactions, ERC20 / ERC721 tokens, transfers, receipts, logs, contracts, internal transactions.
 2.3k Jan 1, 2023
2.3k Jan 1, 2023
An easier way to build neural search on the cloud
Jina is geared towards building search systems for any kind of data, including text, images, audio, video and many more. With the modular design & multi-layer abstraction, you can leverage the efficient patterns to build the system by parts, or chaining them into a Flow for an end-to-end experience.
17k Jan 1, 2023

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
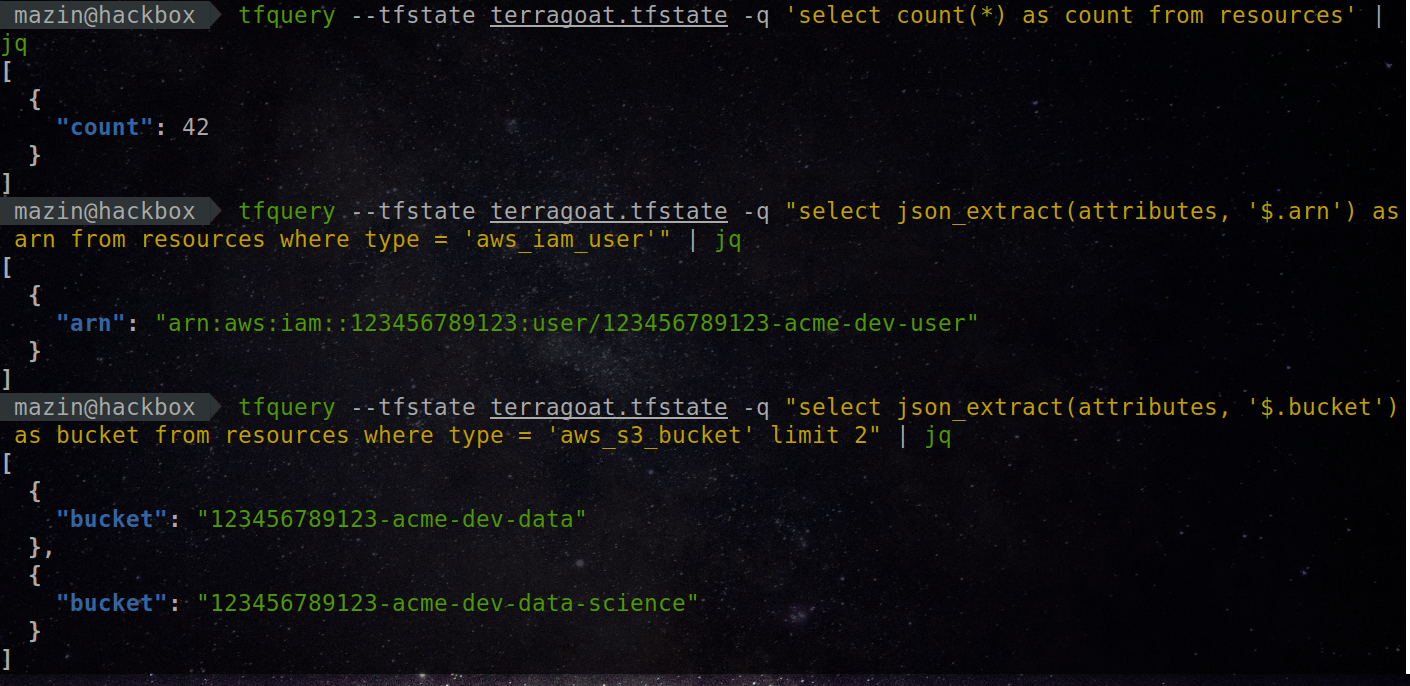
tfquery: Run SQL queries on your Terraform infrastructure. Query resources and analyze its configuration using a SQL-powered framework.
🌩️ tfquery 🌩️ Run SQL queries on your Terraform infrastructure. Ask questions that are hard to answer 🚀 What is tfquery? tfquery is a framework tha
 311 Dec 21, 2022
311 Dec 21, 2022
![[CVPR 2021] Unsupervised 3D Shape Completion through GAN Inversion](https://github.com/junzhezhang/shape-inversion/raw/main/teaser.png)
[CVPR 2021] Unsupervised 3D Shape Completion through GAN Inversion
ShapeInversion Paper Junzhe Zhang, Xinyi Chen, Zhongang Cai, Liang Pan, Haiyu Zhao, Shuai Yi, Chai Kiat Yeo, Bo Dai, Chen Change Loy "Unsupervised 3D
 100 Dec 22, 2022
100 Dec 22, 2022
Implementation of "Fast and Flexible Temporal Point Processes with Triangular Maps" (Oral @ NeurIPS 2020)
Fast and Flexible Temporal Point Processes with Triangular Maps This repository includes a reference implementation of the algorithms described in "Fa
 20 Dec 2, 2022
20 Dec 2, 2022
Universal Command Line Interface for Amazon Web Services
This package provides a unified command line interface to Amazon Web Services.
 13.3k Jan 7, 2023
13.3k Jan 7, 2023

Rendering Point Clouds with Compute Shaders
Compute Shader Based Point Cloud Rendering This repository contains the source code to our techreport: Rendering Point Clouds with Compute Shaders and
 460 Jan 5, 2023
460 Jan 5, 2023

A little proxy tool based on Tencent Cloud Function Service.
SCFProxy 一个基于腾讯云函数服务的免费代理池。 安装 python3 -m venv .venv source .venv/bin/activate pip3 install -r requirements.txt 项目配置 函数配置 开通腾讯云函数服务 在 函数服务 新建 中使用自定义
 716 Dec 26, 2022
716 Dec 26, 2022
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
121 Dec 12, 2022
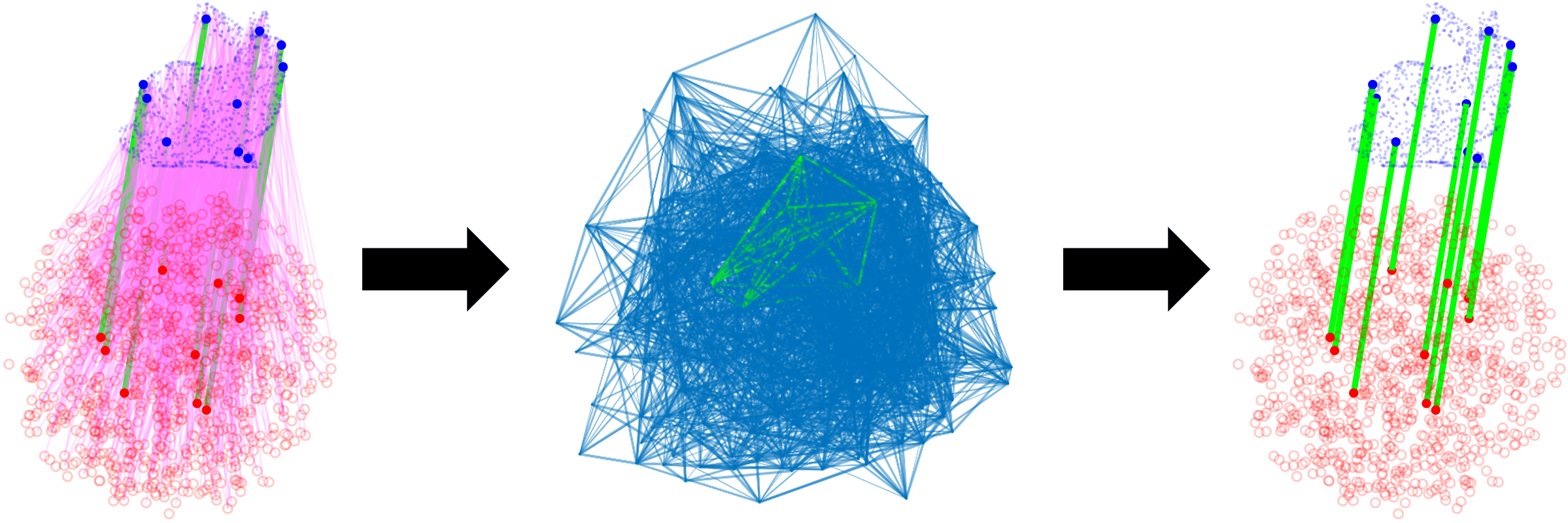
![[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation](https://github.com/Na-Z/attMPTI/raw/main/framework.jpg)
[CVPR 2021] Few-shot 3D Point Cloud Semantic Segmentation
Few-shot 3D Point Cloud Semantic Segmentation Created by Na Zhao from National University of Singapore Introduction This repository contains the PyTor
 117 Dec 27, 2022
117 Dec 27, 2022

Self-Supervised Learning for Domain Adaptation on Point-Clouds
Self-Supervised Learning for Domain Adaptation on Point-Clouds Introduction Self-supervised learning (SSL) allows to learn useful representations from
 66 Dec 20, 2022
66 Dec 20, 2022

(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
 86 Oct 5, 2022
86 Oct 5, 2022
(CVPR 2021) Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds
BRNet Introduction This is a release of the code of our paper Back-tracing Representative Points for Voting-based 3D Object Detection in Point Clouds,
86 Oct 5, 2022

Official PyTorch implementation of CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds Introduction This is the official PyTorch implementation of o
 96 Dec 7, 2022
96 Dec 7, 2022
MMDetection3D is an open source object detection toolbox based on PyTorch
MMDetection3D is an open source object detection toolbox based on PyTorch, towards the next-generation platform for general 3D detection. It is a part of the OpenMMLab project developed by MMLab.
 3.2k Jan 5, 2023
3.2k Jan 5, 2023

A light-weight, versatile XYZ tile server, built with Flask and Rasterio :earth_africa:
Terracotta is a pure Python tile server that runs as a WSGI app on a dedicated webserver or as a serverless app on AWS Lambda. It is built on a modern
 531 Dec 28, 2022
531 Dec 28, 2022
Cloud Optimized GeoTIFF creation and validation plugin for rasterio
rio-cogeo Cloud Optimized GeoTIFF (COG) creation and validation plugin for Rasterio. Documentation: https://cogeotiff.github.io/rio-cogeo/ Source Code
 216 Dec 31, 2022
216 Dec 31, 2022

Implementation of CVPR'21: RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction
RfD-Net [Project Page] [Paper] [Video] RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction Yinyu Nie, Ji Hou, Xiaoguang Han, Matthi
 162 Jan 6, 2023
162 Jan 6, 2023

Implementation of the "PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences" paper.
PSTNet: Point Spatio-Temporal Convolution on Point Cloud Sequences Introduction Point cloud sequences are irregular and unordered in the spatial dimen
63 Dec 9, 2022
![[PyTorch] Official implementation of CVPR2021 paper](https://github.com/XuyangBai/PointDSC/raw/master/figures/pipeline.png)
[PyTorch] Official implementation of CVPR2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency". https://arxiv.org/abs/2103.05465
PointDSC repository PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency",
 153 Dec 14, 2022
153 Dec 14, 2022

《A-CNN: Annularly Convolutional Neural Networks on Point Clouds》(2019)
A-CNN: Annularly Convolutional Neural Networks on Point Clouds Created by Artem Komarichev, Zichun Zhong, Jing Hua from Department of Computer Science
 44 Feb 24, 2022
44 Feb 24, 2022

(CVPR 2021) PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds by Mutian Xu*, Runyu Ding*, Hengshuang Zhao, and Xiaojuan Qi. Int
 228 Dec 25, 2022
228 Dec 25, 2022
Cloud-optimized, single-file archive format for pyramids of map tiles
PMTiles PMTiles is a single-file archive format for tiled data. A PMTiles archive can be hosted on a commodity storage platform such as S3, and enable
 325 Jan 4, 2023
325 Jan 4, 2023

💻 A fully functional local AWS cloud stack. Develop and test your cloud & Serverless apps offline!
LocalStack - A fully functional local AWS cloud stack LocalStack provides an easy-to-use test/mocking framework for developing Cloud applications. Cur
 45.3k Jan 2, 2023
45.3k Jan 2, 2023
A black hole for Internet advertisements
Network-wide ad blocking via your own Linux hardware The Pi-hole® is a DNS sinkhole that protects your devices from unwanted content, without installi
 40.3k Jan 9, 2023
40.3k Jan 9, 2023
Guide: Finetune GPT2-XL (1.5 Billion Parameters) and GPT-NEO (2.7 B) on a single 16 GB VRAM V100 Google Cloud instance with Huggingface Transformers using DeepSpeed
Guide: Finetune GPT2-XL (1.5 Billion Parameters) and GPT-NEO (2.7 Billion Parameters) on a single 16 GB VRAM V100 Google Cloud instance with Huggingfa
 289 Jan 6, 2023
289 Jan 6, 2023
Multivariate imputation and matrix completion algorithms implemented in Python
A variety of matrix completion and imputation algorithms implemented in Python 3.6. To install: pip install fancyimpute Do not use conda. We don't sup
 1.1k Dec 18, 2022
1.1k Dec 18, 2022
An easier way to build neural search on the cloud
An easier way to build neural search on the cloud Jina is a deep learning-powered search framework for building cross-/multi-modal search systems (e.g
17k Jan 2, 2023

Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021)
Style-based Point Generator with Adversarial Rendering for Point Cloud Completion (CVPR 2021) An efficient PyTorch library for Point Cloud Completion.
119 Jan 2, 2023
A Tensorflow model for text recognition (CNN + seq2seq with visual attention) available as a Python package and compatible with Google Cloud ML Engine.
Attention-based OCR Visual attention-based OCR model for image recognition with additional tools for creating TFRecords datasets and exporting the tra
 933 Dec 29, 2022
933 Dec 29, 2022
![git《Commonsense Knowledge Base Completion with Structural and Semantic Context》(AAAI 2020) GitHub: [fig1]](https://github.com/allenai/commonsense-kg-completion/raw/master/figures/completion.png)
git《Commonsense Knowledge Base Completion with Structural and Semantic Context》(AAAI 2020) GitHub: [fig1]
Commonsense Knowledge Base Completion with Structural and Semantic Context Code for the paper Commonsense Knowledge Base Completion with Structural an
 96 Nov 5, 2022
96 Nov 5, 2022

Official implementation of YOGO for Point-Cloud Processing
You Only Group Once: Efficient Point-Cloud Processing with Token Representation and Relation Inference Module By Chenfeng Xu, Bohan Zhai, Bichen Wu, T
 67 Dec 20, 2022
67 Dec 20, 2022
![[ICLR 2021, Spotlight] Large Scale Image Completion via Co-Modulated Generative Adversarial Networks](https://github.com/zsyzzsoft/co-mod-gan/raw/master/imgs/demo.gif)
[ICLR 2021, Spotlight] Large Scale Image Completion via Co-Modulated Generative Adversarial Networks
Large Scale Image Completion via Co-Modulated Generative Adversarial Networks, ICLR 2021 (Spotlight) Demo | Paper [NEW!] Time to play with our interac
 373 Jan 2, 2023
373 Jan 2, 2023
Nimbus - Open Source Cloud Computing Software - 100% Apache2 licensed
⚠️ The Nimbus infrastructure project is no longer under development. ⚠️ For more information, please read the news announcement. If you are interested
 194 Jun 30, 2022
194 Jun 30, 2022
Spinnaker is an open source, multi-cloud continuous delivery platform for releasing software changes with high velocity and confidence.
Welcome to the Spinnaker Project Spinnaker is an open-source continuous delivery platform for releasing software changes with high velocity and confid
 8.8k Jan 7, 2023
8.8k Jan 7, 2023
Continuous Archiving for Postgres
WAL-E Continuous archiving for Postgres WAL-E is a program designed to perform continuous archiving of PostgreSQL WAL files and base backups. To corre
 3.4k Dec 30, 2022
3.4k Dec 30, 2022

A Terminal Client for MySQL with AutoCompletion and Syntax Highlighting.
mycli A command line client for MySQL that can do auto-completion and syntax highlighting. HomePage: http://mycli.net Documentation: http://mycli.net/
 10.7k Jan 7, 2023
10.7k Jan 7, 2023
The command-line tool that gives easy access to all of the capabilities of B2 Cloud Storage
B2 Command Line Tool The command-line tool that gives easy access to all of the capabilities of B2 Cloud Storage. This program provides command-line a
 467 Dec 8, 2022
467 Dec 8, 2022
This project is the official implementation of our accepted ICLR 2021 paper BiPointNet: Binary Neural Network for Point Clouds.
BiPointNet: Binary Neural Network for Point Clouds Created by Haotong Qin, Zhongang Cai, Mingyuan Zhang, Yifu Ding, Haiyu Zhao, Shuai Yi, Xianglong Li
 59 Dec 17, 2022
59 Dec 17, 2022
Module for statistical learning, with a particular emphasis on time-dependent modelling
Operating system Build Status Linux/Mac Windows tick tick is a Python 3 module for statistical learning, with a particular emphasis on time-dependent
 410 Dec 14, 2022
410 Dec 14, 2022

ICRA 2021 "Towards Precise and Efficient Image Guided Depth Completion"
PENet: Precise and Efficient Depth Completion This repo is the PyTorch implementation of our paper to appear in ICRA2021 on "Towards Precise and Effic
 232 Dec 25, 2022
232 Dec 25, 2022
CoCalc: Collaborative Calculation in the Cloud
logo CoCalc Collaborative Calculation and Data Science CoCalc is a virtual online workspace for calculations, research, collaboration and authoring do
 1k Dec 29, 2022
1k Dec 29, 2022
Analytics service that is part of iter8. Robust analytics and control to unleash cloud-native continuous experimentation.
iter8-analytics iter8 enables statistically robust continuous experimentation of microservices in your CI/CD pipelines. For in-depth information about
 16 Oct 14, 2021
16 Oct 14, 2021
FastAPI on Google Cloud Run
cloudrun-fastapi Boilerplate for running FastAPI on Google Cloud Run with Google Cloud Build for deployment. For all documentation visit the docs fold
 139 Dec 27, 2022
139 Dec 27, 2022