280 Repositories
Python robotics-simulation Libraries

Code related to the manuscript "Averting A Crisis In Simulation-Based Inference"
Abstract We present extensive empirical evidence showing that current Bayesian simulation-based inference algorithms are inadequate for the falsificat
 3 Nov 14, 2022
3 Nov 14, 2022
Network Dynaimcs Simulation
A Final Year Project in CUHK, Autumn 2021 Network Dynaimcs Simulation Files param.h edit all the variables & settings here simulate.c the main program
 0 Mar 28, 2022
0 Mar 28, 2022
Repo for EchoVPR: Echo State Networks for Visual Place Recognition
EchoVPR Repo for EchoVPR: Echo State Networks for Visual Place Recognition Currently under development Dirs: data: pre-collected hidden representation
 4 Oct 4, 2022
4 Oct 4, 2022

Simulation artifacts, core components and configuration files to integrate AWS DeepRacer device with ROS Navigation stack.
AWS DeepRacer Overview The AWS DeepRacer Evo vehicle is a 1/18th scale Wi-Fi enabled 4-wheel ackermann steering platform that features two RGB cameras
 31 Nov 21, 2022
31 Nov 21, 2022

Vision-and-Language Navigation in Continuous Environments using Habitat
Vision-and-Language Navigation in Continuous Environments (VLN-CE) Project Website — VLN-CE Challenge — RxR-Habitat Challenge Official implementations
 132 Jan 2, 2023
132 Jan 2, 2023
A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of a custom mass and velocity within the simulation, select what specifically is displayed, and move the camera.
Python-Orbit-Sim A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of
 3 Oct 22, 2021
3 Oct 22, 2021
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
 270 Jan 7, 2023
270 Jan 7, 2023
A battery pack simulation tool that uses the PyBaMM framework
Overview of liionpack liionpack takes a 1D PyBaMM model and makes it into a pack. You can either specify the configuration e.g. 16 cells in parallel a
 40 Jan 5, 2023
40 Jan 5, 2023
Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs
PhyCRNet Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs Paper link: [ArXiv] By: Pu Ren, Chengping Rao, Yang
 11 Aug 23, 2022
11 Aug 23, 2022

We utilize deep reinforcement learning to obtain favorable trajectories for visual-inertial system calibration.
Unified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning Update: The lastest code will be updated in this branch. Pleas
 27 Dec 29, 2022
27 Dec 29, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023

linorobot2 is a ROS2 port of the linorobot package
linorobot2 is a ROS2 port of the linorobot package. If you're planning to build your own custom ROS2 robot (2WD, 4WD, Mecanum Drive) using accessible parts, then this package is for you. This repository contains launch files to easily integrate your DIY robot with Nav2 and a simulation pipeline to run and verify your experiments on a virtual robot in Gazebo.
 195 Dec 29, 2022
195 Dec 29, 2022

CLIPort: What and Where Pathways for Robotic Manipulation
CLIPort CLIPort: What and Where Pathways for Robotic Manipulation Mohit Shridhar, Lucas Manuelli, Dieter Fox CoRL 2021 CLIPort is an end-to-end imitat
 246 Dec 11, 2022
246 Dec 11, 2022
Event-based hardware simulation framework
An event-based multi-device simulation framework providing configuration and orchestration of complex multi-device simulations.
 3 Feb 1, 2022
3 Feb 1, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022
Monte Carlo simulation of 3G rules
mc3g Monte Carlo simulation of 3G rules This project contains the Python code to do simulations of events according to the 3G rule (in German: "Geimpf
 4 Nov 1, 2021
4 Nov 1, 2021
Simulation of the solar system using various nummerical methods
solar-system Simulation of the solar system using various nummerical methods Download the repo Make shure matplotlib, scipy etc. are installed execute
 7 Jul 15, 2022
7 Jul 15, 2022

A web app for presenting my research in BEM(building energy model) simulation
BEM(building energy model)-SIM-APP The is a web app presenting my research in BEM(building energy model) calibration. You can play around with some pa
 8 Sep 3, 2021
8 Sep 3, 2021

PyBullet CartPole and Quadrotor environments—with CasADi symbolic a priori dynamics—for learning-based control and reinforcement learning
safe-control-gym Physics-based CartPole and Quadrotor Gym environments (using PyBullet) with symbolic a priori dynamics (using CasADi) for learning-ba
 300 Dec 28, 2022
300 Dec 28, 2022
This solves the autonomous driving issue which is supported by deep learning technology. Given a video, it splits into images and predicts the angle of turning for each frame.
Self Driving Car An autonomous car (also known as a driverless car, self-driving car, and robotic car) is a vehicle that is capable of sensing its env
 4 Sep 4, 2021
4 Sep 4, 2021
Libraries, tools and tasks created and used at DeepMind Robotics.
Libraries, tools and tasks created and used at DeepMind Robotics.
 270 Nov 30, 2022
270 Nov 30, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

A generalized framework for prototyping full-stack cooperative driving automation applications under CARLA+SUMO.
OpenCDA OpenCDA is a SIMULATION tool integrated with a prototype cooperative driving automation (CDA; see SAE J3216) pipeline as well as regular autom
 726 Dec 29, 2022
726 Dec 29, 2022
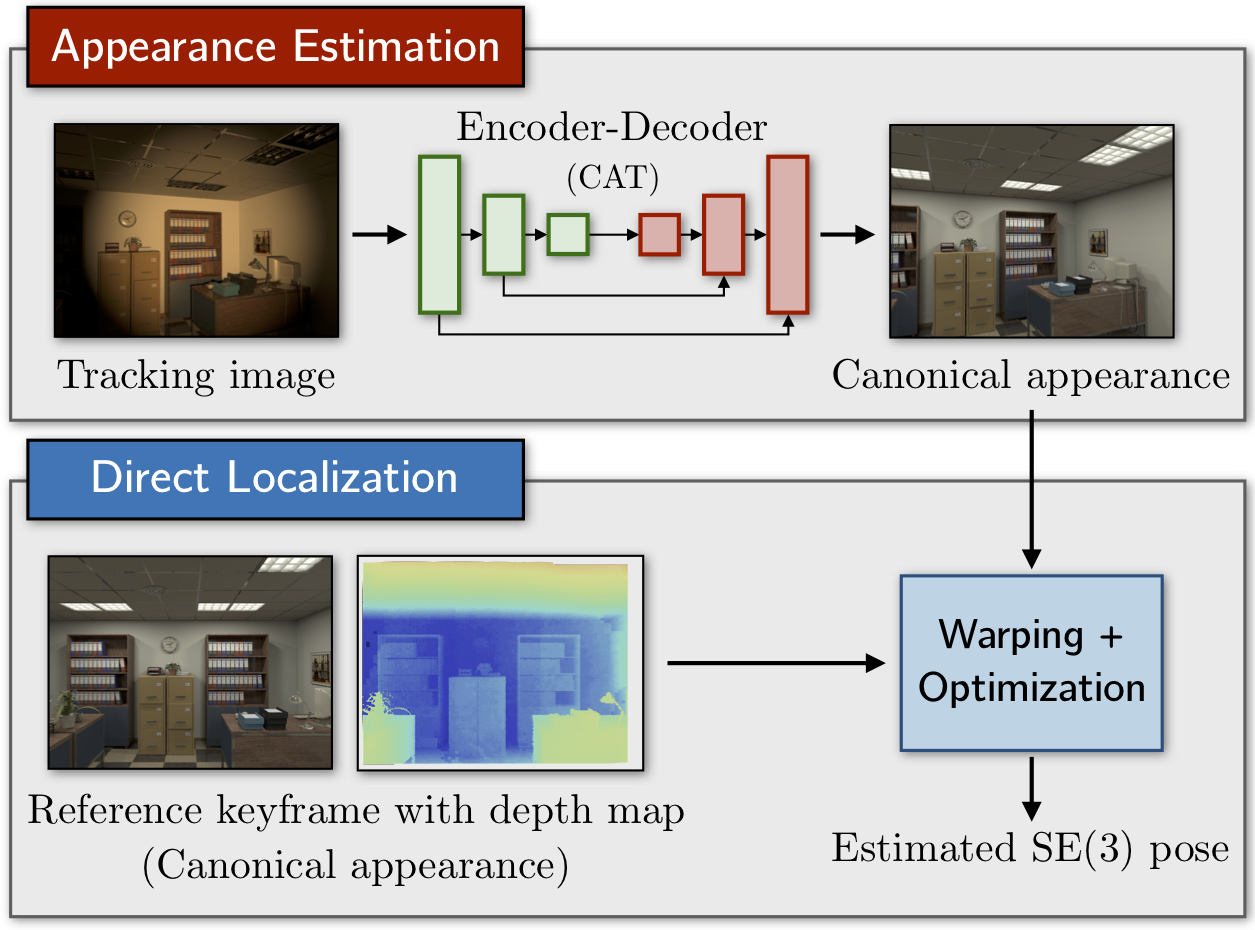
Canonical Appearance Transformations
CAT-Net: Learning Canonical Appearance Transformations Code to accompany our paper "How to Train a CAT: Learning Canonical Appearance Transformations
 54 Dec 24, 2022
54 Dec 24, 2022
YARR is Yet Another Robotics and Reinforcement learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
 21 Aug 1, 2021
21 Aug 1, 2021
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
51 Dec 27, 2022

Set of utilities for exporting/controlling your robot in Blender
Blender Robotics Utils This repository contains utilities for exporting/controlling your robot in Blender Maintainers This repository is maintained by
 33 Nov 30, 2022
33 Nov 30, 2022

Attractors is a package for simulation and visualization of strange attractors.
attractors Attractors is a package for simulation and visualization of strange attractors. Installation The simplest way to install the module is via
 45 Jul 31, 2022
45 Jul 31, 2022

NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation (ACL-IJCNLP 2021)
NeuralWOZ This code is official implementation of "NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation". Sungdong Kim, Mi
 31 Oct 25, 2022
31 Oct 25, 2022
![[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design](https://github.com/eanswer/DiffHand/raw/master/demos/representative_image.jpg)
[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design
DiffHand This repository contains the implementation for the paper An End-to-End Differentiable Framework for Contact-Aware Robot Design (RSS 2021). I
 60 Jan 4, 2023
60 Jan 4, 2023
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
 43 Nov 21, 2022
43 Nov 21, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
 49 Nov 28, 2022
49 Nov 28, 2022
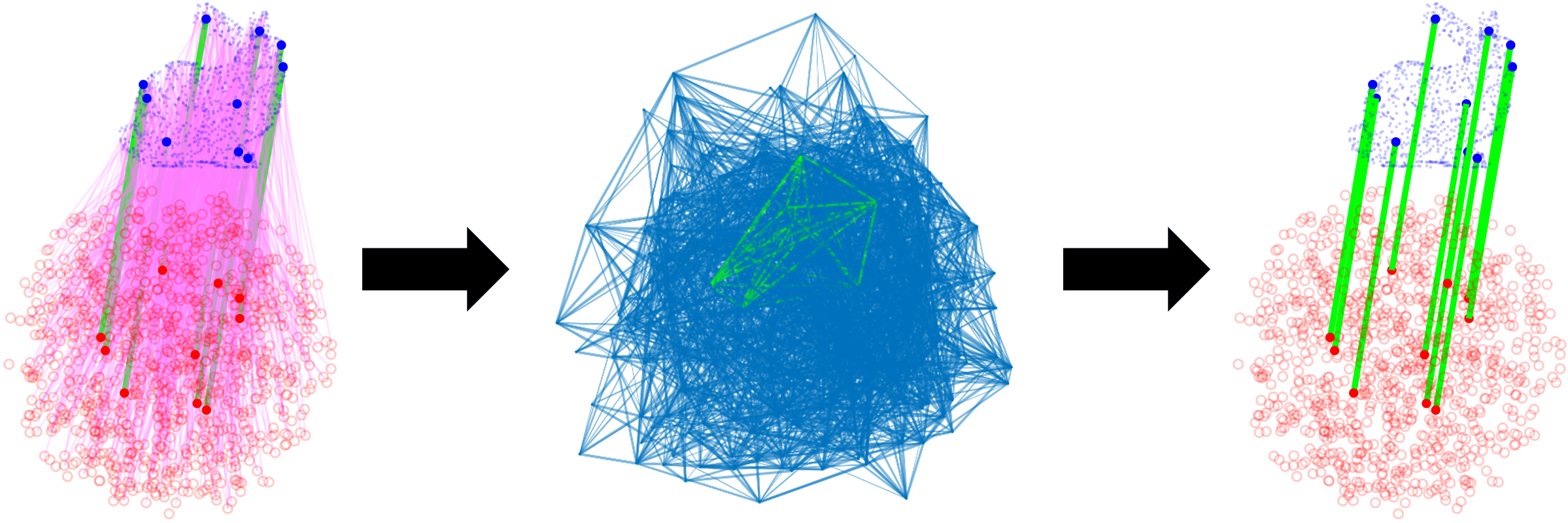
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022
SmartSim Infrastructure Library.
Home Install Documentation Slack Invite Cray Labs SmartSim SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and Ten
 139 Jan 1, 2023
139 Jan 1, 2023

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research
Megaverse Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research. The efficient design of the engine enables ph
 191 Dec 23, 2022
191 Dec 23, 2022
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow, in High Performance Computing (HPC) simulations and workloads.
139 Jan 1, 2023
This is the dataset and code release of the OpenRooms Dataset.
This is the dataset and code release of the OpenRooms Dataset.
 95 Jan 8, 2023
95 Jan 8, 2023
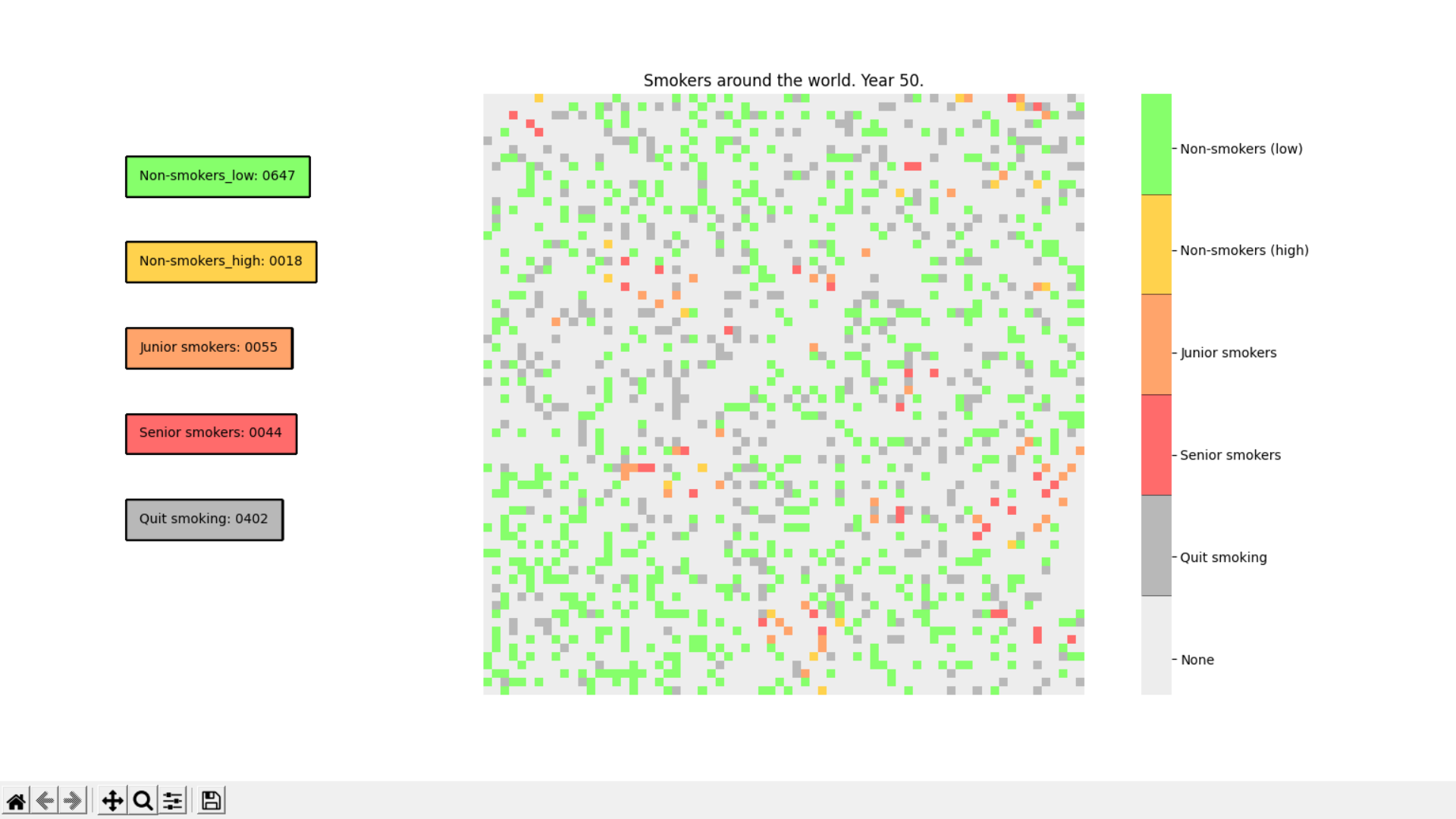
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain amount of time.
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain
 5 Nov 8, 2022
5 Nov 8, 2022
MDAnalysis tool to calculate membrane curvature.
The MDAkit for membrane curvature analysis is part of the Google Summer of Code program and it is linked to a Code of Conduct.
 19 Oct 20, 2022
19 Oct 20, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023
Notspot robot simulation - Python version
Notspot robot simulation - Python version This repository contains all the files and code needed to simulate the notspot quadrupedal robot using Gazeb
 50 Sep 26, 2022
50 Sep 26, 2022
A simple 3D rigid body simulation written in python
pyRigidBody3d A simple 3D rigid body simulation written in python
 30 Oct 7, 2022
30 Oct 7, 2022
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
44 Jan 6, 2023
A custom-designed Spider Robot trained to walk using Deep RL in a PyBullet Simulation
SpiderBot_DeepRL Title: Implementation of Single and Multi-Agent Deep Reinforcement Learning Algorithms for a Walking Spider Robot Authors(s): Arijit
 9 Jul 28, 2022
9 Jul 28, 2022
Python sample codes for robotics algorithms.
PythonRobotics Python codes for robotics algorithm. Table of Contents What is this? Requirements Documentation How to use Localization Extended Kalman
 17.2k Jan 1, 2023
17.2k Jan 1, 2023

Civsim is a basic civilisation simulation and modelling system built in Python 3.8.
Civsim Introduction Civsim is a basic civilisation simulation and modelling system built in Python 3.8. It requires the following packages: perlin_noi
 17 Aug 8, 2022
17 Aug 8, 2022

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Python implementation of the ASFLIP advection method
This is a python implementation of the ASFLIP advection method . We would like to hear from you if you appreciate this work.
 133 Nov 13, 2022
133 Nov 13, 2022
RecSim NG: Toward Principled Uncertainty Modeling for Recommender Ecosystems
RecSim NG, a probabilistic platform for multi-agent recommender systems simulation. RecSimNG is a scalable, modular, differentiable simulator implemented in Edward2 and TensorFlow. It offers: a powerful, general probabilistic programming language for agent-behavior specification;
 110 Dec 16, 2022
110 Dec 16, 2022

PyDy, short for Python Dynamics, is a tool kit written in the Python
PyDy, short for Python Dynamics, is a tool kit written in the Python programming language that utilizes an array of scientific programs to enable the study of multibody dynamics. The goal is to have a modular framework and eventually a physics abstraction layer which utilizes a variety of backends that can provide the user with their desired workflow
 307 Jan 1, 2023
307 Jan 1, 2023
Official PyTorch implementation of Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yu
 63 Jan 3, 2023
63 Jan 3, 2023

Differentiable simulation for system identification and visuomotor control
gradsim gradSim: Differentiable simulation for system identification and visuomotor control gradSim is a unified differentiable rendering and multiphy
 105 Dec 18, 2022
105 Dec 18, 2022

Spatial Action Maps for Mobile Manipulation (RSS 2020)
spatial-action-maps Update: Please see our new spatial-intention-maps repository, which extends this work to multi-agent settings. It contains many ne
 27 Nov 30, 2022
27 Nov 30, 2022
:mag_right: :chart_with_upwards_trend: :snake: :moneybag: Backtest trading strategies in Python.
Backtesting.py Backtest trading strategies with Python. Project website Documentation the project if you use it. Installation $ pip install backtestin
 3.1k Dec 31, 2022
3.1k Dec 31, 2022

Spatial Intention Maps for Multi-Agent Mobile Manipulation (ICRA 2021)
spatial-intention-maps This code release accompanies the following paper: Spatial Intention Maps for Multi-Agent Mobile Manipulation Jimmy Wu, Xingyua
70 Jan 2, 2023

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
 4.7k Jan 1, 2023
4.7k Jan 1, 2023

SSL_SLAM2: Lightweight 3-D Localization and Mapping for Solid-State LiDAR (mapping and localization separated) ICRA 2021
SSL_SLAM2 Lightweight 3-D Localization and Mapping for Solid-State LiDAR (Intel Realsense L515 as an example) This repo is an extension work of SSL_SL
 1.3k Jan 8, 2023
1.3k Jan 8, 2023

Open world survival environment for reinforcement learning
Crafter Open world survival environment for reinforcement learning. Highlights Crafter is a procedurally generated 2D world, where the agent finds foo
 213 Jan 5, 2023
213 Jan 5, 2023

A 35mm camera, based on the Canonet G-III QL17 rangefinder, simulated in Python.
c is for Camera A 35mm camera, based on the Canonet G-III QL17 rangefinder, simulated in Python. The purpose of this project is to explore and underst
 146 Sep 26, 2022
146 Sep 26, 2022

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022
Safe Bayesian Optimization
SafeOpt - Safe Bayesian Optimization This code implements an adapted version of the safe, Bayesian optimization algorithm, SafeOpt [1], [2]. It also p
 111 Dec 11, 2022
111 Dec 11, 2022
Python script for Linear, Non-Linear Convection, Burger’s & Poisson Equation in 1D & 2D, 1D Diffusion Equation using Standard Wall Function, 2D Heat Conduction Convection equation with Dirichlet & Neumann BC, full Navier-Stokes Equation coupled with Poisson equation for Cavity and Channel flow in 2D using Finite Difference Method & Finite Volume Method.
Navier-Stokes-numerical-solution-using-Python- Python script for Linear, Non-Linear Convection, Burger’s & Poisson Equation in 1D & 2D, 1D D
 89 Jan 4, 2023
89 Jan 4, 2023
OPEM (Open Source PEM Fuel Cell Simulation Tool)
Table of contents What is PEM? Overview Installation Usage Executable Library Telegram Bot Try OPEM in Your Browser! MATLAB Issues & Bug Reports Contr
 133 Jan 4, 2023
133 Jan 4, 2023
AnuGA for the simulation of the shallow water equation
ANUGA Contents ANUGA What is ANUGA? Installation Documentation and Help Mailing Lists Web sites Latest source code Bug reports Developer information L
 147 Dec 14, 2022
147 Dec 14, 2022

Unknown Horizons official code repository
Unknown-Horizons based on Fifengine is no longer in development. We are porting it to Godot Engine. Please dont report any new bugs. Only bugfixes wil
 1.3k Dec 30, 2022
1.3k Dec 30, 2022
MazeRL is an application oriented Deep Reinforcement Learning (RL) framework
MazeRL is an application oriented Deep Reinforcement Learning (RL) framework, addressing real-world decision problems. Our vision is to cover the complete development life cycle of RL applications ranging from simulation engineering up to agent development, training and deployment.
 222 Dec 24, 2022
222 Dec 24, 2022
Differentiable molecular simulation of proteins with a coarse-grained potential
Differentiable molecular simulation of proteins with a coarse-grained potential This repository contains the learned potential, simulation scripts and
 44 Dec 10, 2022
44 Dec 10, 2022
qecsim is a Python 3 package for simulating quantum error correction using stabilizer codes.
qecsim qecsim is a Python 3 package for simulating quantum error correction using stabilizer codes.
 44 Dec 20, 2022
44 Dec 20, 2022
Simulation-Based Inference Benchmark
This repository contains a simulation-based inference benchmark framework, sbibm, which we describe in the associated manuscript "Benchmarking Simulation-based Inference".
 58 Oct 13, 2022
58 Oct 13, 2022
Seach Losses of our paper 'Loss Function Discovery for Object Detection via Convergence-Simulation Driven Search', accepted by ICLR 2021.
CSE-Autoloss Designing proper loss functions for vision tasks has been a long-standing research direction to advance the capability of existing models
 54 Dec 17, 2022
54 Dec 17, 2022

Train robotic agents to learn pick and place with deep learning for vision-based manipulation in PyBullet.
Ravens is a collection of simulated tasks in PyBullet for learning vision-based robotic manipulation, with emphasis on pick and place. It features a Gym-like API with 10 tabletop rearrangement tasks, each with (i) a scripted oracle that provides expert demonstrations (for imitation learning), and (ii) reward functions that provide partial credit (for reinforcement learning).
367 Jan 9, 2023
PaddleRobotics is an open-source algorithm library for robots based on Paddle, including open-source parts such as human-robot interaction, complex motion control, environment perception, SLAM positioning, and navigation.
简体中文 | English PaddleRobotics paddleRobotics是基于paddle的机器人开源算法库集,包括人机交互、复杂运动控制、环境感知、slam定位导航等开源算法部分。 人机交互 主动多模交互技术TFVT-HRI 主动多模交互技术是通过视觉、语音、触摸传感器等输入机器人
 185 Dec 26, 2022
185 Dec 26, 2022
Network simulation tools
Overview I'm building my network simulation environments with Vagrant using libvirt plugin on a Ubuntu 20.04 system... and I always hated how boring i
 219 Jan 7, 2023
219 Jan 7, 2023
An open source robotics benchmark for meta- and multi-task reinforcement learning
Meta-World Meta-World is an open-source simulated benchmark for meta-reinforcement learning and multi-task learning consisting of 50 distinct robotic
 823 Jan 6, 2023
823 Jan 6, 2023