485 Repositories
Python Point-Spatio-Temporal-Convolution Libraries
Pointer-generator - Code for the ACL 2017 paper Get To The Point: Summarization with Pointer-Generator Networks
Note: this code is no longer actively maintained. However, feel free to use the Issues section to discuss the code with other users. Some users have u
 2.1k Jan 4, 2023
2.1k Jan 4, 2023
UnpNet - Rethinking 3-D LiDAR Point Cloud Segmentation(IEEE TNNLS)
UnpNet Citation Please cite the following paper if you use this repository in your reseach. @article {PMID:34914599, Title = {Rethinking 3-D LiDAR Po
 4 Jul 15, 2022
4 Jul 15, 2022

Distributed Grid Descent: an algorithm for hyperparameter tuning guided by Bayesian inference, designed to run on multiple processes and potentially many machines with no central point of control
Distributed Grid Descent: an algorithm for hyperparameter tuning guided by Bayesian inference, designed to run on multiple processes and potentially many machines with no central point of control.
 1 Jan 1, 2022
1 Jan 1, 2022

TarkovScrappy - A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov!
TarkovScrappy A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov! Hideout items
 2 Apr 11, 2022
2 Apr 11, 2022

PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Created by Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas from Sta
 4k Dec 30, 2022
4k Dec 30, 2022

A Python library for common tasks on 3D point clouds
Point Cloud Utils (pcu) - A Python library for common tasks on 3D point clouds Point Cloud Utils (pcu) is a utility library providing the following fu
 622 Dec 27, 2022
622 Dec 27, 2022
NeoDTI: Neural integration of neighbor information from a heterogeneous network for discovering new drug-target interactions
NeoDTI NeoDTI: Neural integration of neighbor information from a heterogeneous network for discovering new drug-target interactions (Bioinformatics).
 62 Nov 26, 2022
62 Nov 26, 2022

Joint-task Self-supervised Learning for Temporal Correspondence (NeurIPS 2019)
Joint-task Self-supervised Learning for Temporal Correspondence Project | Paper Overview Joint-task Self-supervised Learning for Temporal Corresponden
 167 Dec 14, 2022
167 Dec 14, 2022

Implementation of our paper "Video Playback Rate Perception for Self-supervised Spatio-Temporal Representation Learning".
PRP Introduction This is the implementation of our paper "Video Playback Rate Perception for Self-supervised Spatio-Temporal Representation Learning".
 39 Dec 29, 2022
39 Dec 29, 2022
Video Representation Learning by Recognizing Temporal Transformations. In ECCV, 2020.
Video Representation Learning by Recognizing Temporal Transformations [Project Page] Simon Jenni, Givi Meishvili, and Paolo Favaro. In ECCV, 2020. Thi
 46 Nov 14, 2022
46 Nov 14, 2022
Python code that gives the fastest path from point a to point b of a chess horse
PERSONAL-PROJECTS CARLOS MAGALLANES-ARANDA'S PERSONAL PROJECTS kchess.py is the code. its input is the start and the end. EXMPLE - a1 d5 its output is
 1 Dec 26, 2021
1 Dec 26, 2021

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022

PyTorch Implementation of PIXOR: Real-time 3D Object Detection from Point Clouds
PIXOR: Real-time 3D Object Detection from Point Clouds This is a custom implementation of the paper from Uber ATG using PyTorch 1.0. It represents the
 270 Dec 14, 2022
270 Dec 14, 2022
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
 72 Dec 24, 2022
72 Dec 24, 2022
Group Activity Recognition with Clustered Spatial Temporal Transformer
GroupFormer Group Activity Recognition with Clustered Spatial-TemporalTransformer Backbone Style Action Acc Activity Acc Config Download Inv3+flow+pos
 28 Dec 12, 2022
28 Dec 12, 2022

Codes for the paper Contrast and Mix: Temporal Contrastive Video Domain Adaptation with Background Mixing
Contrast and Mix (CoMix) The repository contains the codes for the paper Contrast and Mix: Temporal Contrastive Video Domain Adaptation with Backgroun
 13 Dec 10, 2022
13 Dec 10, 2022
Self-Adaptable Point Processes with Nonparametric Time Decays
NPPDecay This is our implementation for the paper Self-Adaptable Point Processes with Nonparametric Time Decays, by Zhimeng Pan, Zheng Wang, Jeff M. P
 2 Sep 24, 2022
2 Sep 24, 2022

High-performance moving least squares material point method (MLS-MPM) solver.
High-Performance MLS-MPM Solver with Cutting and Coupling (CPIC) (MIT License) A Moving Least Squares Material Point Method with Displacement Disconti
 2.2k Dec 31, 2022
2.2k Dec 31, 2022

Help you understand Manual and w/ Clutch point while driving.
简体中文 forza_auto_gear forza_auto_gear is a tool for Forza Horizon 5. It will help us understand the best gear shift point using Manual or w/ Clutch in
 15 Oct 8, 2022
15 Oct 8, 2022

Tensorflow Implementation for "Pre-trained Deep Convolution Neural Network Model With Attention for Speech Emotion Recognition"
Tensorflow Implementation for "Pre-trained Deep Convolution Neural Network Model With Attention for Speech Emotion Recognition" Pre-trained Deep Convo
 5 Nov 11, 2022
5 Nov 11, 2022
The code for paper "Contrastive Spatio-Temporal Pretext Learning for Self-supervised Video Representation" which is accepted by AAAI 2022
Contrastive Spatio Temporal Pretext Learning for Self-supervised Video Representation (AAAI 2022) The code for paper "Contrastive Spatio-Temporal Pret
 8 Jun 30, 2022
8 Jun 30, 2022

PyTorch implementation of DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration (BMVC 2021)
DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration [video] [paper] [supplementary] [data] [thesis] Introduction De
 10 Dec 14, 2022
10 Dec 14, 2022

Dynamics-aware Adversarial Attack of 3D Sparse Convolution Network
Leaded Gradient Method (LGM) This repository contains the PyTorch implementation for paper Dynamics-aware Adversarial Attack of 3D Sparse Convolution
 2 Oct 18, 2022
2 Oct 18, 2022
Python SDK for LUSID by FINBOURNE, a bi-temporal investment management data platform with portfolio accounting capabilities.
LUSID® Python SDK This is the Python SDK for LUSID by FINBOURNE, a bi-temporal investment management data platform with portfolio accounting capabilit
 6 Dec 24, 2022
6 Dec 24, 2022
Spatio-Temporal Entropy Model (STEM) for end-to-end leaned video compression.
Spatio-Temporal Entropy Model A Pytorch Reproduction of Spatio-Temporal Entropy Model (STEM) for end-to-end leaned video compression. More details can
 16 Nov 28, 2022
16 Nov 28, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023
[AAAI 2022] Negative Sample Matters: A Renaissance of Metric Learning for Temporal Grounding
[AAAI 2022] Negative Sample Matters: A Renaissance of Metric Learning for Temporal Grounding Official Pytorch implementation of Negative Sample Matter
 69 Dec 26, 2022
69 Dec 26, 2022

Neural Point-Based Graphics
Neural Point-Based Graphics Project Video Paper Neural Point-Based Graphics Kara-Ali Aliev1 Artem Sevastopolsky1,2 Maria Kolos1,2 Dmitry Ulyanov3
 252 Dec 13, 2022
252 Dec 13, 2022

Negative Sample Matters: A Renaissance of Metric Learning for Temporal Grounding
2D-TAN (Optimized) Introduction This is an optimized re-implementation repository for AAAI'2020 paper: Learning 2D Temporal Localization Networks for
 112 Dec 31, 2022
112 Dec 31, 2022
ConvBERT: Improving BERT with Span-based Dynamic Convolution
ConvBERT Introduction In this repo, we introduce a new architecture ConvBERT for pre-training based language model. The code is tested on a V100 GPU.
 237 Dec 10, 2022
237 Dec 10, 2022

Implementation of Research Paper "Learning to Enhance Low-Light Image via Zero-Reference Deep Curve Estimation"
Zero-DCE and Zero-DCE++(Lite architechture for Mobile and edge Devices) Papers Abstract The paper presents a novel method, Zero-Reference Deep Curve E
 15 Dec 10, 2022
15 Dec 10, 2022

MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity
MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity Introduction The 3D LiDAR place recognition aim
 16 Dec 8, 2022
16 Dec 8, 2022

Get 2D point positions (e.g., facial landmarks) projected on 3D mesh
points2d_projection_mesh Input 2D points (e.g. facial landmarks) on an image Camera parameters (extrinsic and intrinsic) of the image Aligned 3D mesh
 5 Dec 8, 2022
5 Dec 8, 2022

The official implementation of "Rethink Dilated Convolution for Real-time Semantic Segmentation"
RegSeg The official implementation of "Rethink Dilated Convolution for Real-time Semantic Segmentation" Paper: arxiv D block Decoder Setup Install the
 61 Dec 27, 2022
61 Dec 27, 2022
WSDM2022 Challenge - Large scale temporal graph link prediction
WSDM 2022 Large-scale Temporal Graph Link Prediction - Baseline and Initial Test Set WSDM Cup Website link Link to this challenge This branch offers A
 34 Dec 29, 2022
34 Dec 29, 2022
Official Implementation of SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations
Official Implementation of SimIPU SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations Since
 37 Dec 1, 2022
37 Dec 1, 2022
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
 4 Jul 19, 2022
4 Jul 19, 2022
![[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects](https://github.com/rozumden/ShapeFromBlur/raw/main/examples/imgs/aerobie.gif)
[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects
[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects YouTube | arXiv Prerequisites Kaolin is available here:
 107 Dec 26, 2022
107 Dec 26, 2022
![[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences](https://github.com/hongfz16/Garment4D/raw/main/assets/cover.jpg)
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
 51 Dec 10, 2021
51 Dec 10, 2021
Public repository of the 3DV 2021 paper "Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds"
Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds Björn Michele1), Alexandre Boulch1), Gilles Puy1), Maxime Bucher1) and Rena
 15 Dec 22, 2022
15 Dec 22, 2022
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion This repo intends to release code for our work: Zhaoyang Lyu*, Zhifeng
 68 Jan 3, 2023
68 Jan 3, 2023
"Graph Neural Controlled Differential Equations for Traffic Forecasting", AAAI 2022
Graph Neural Controlled Differential Equations for Traffic Forecasting Setup Python environment for STG-NCDE Install python environment $ conda env cr
 55 Dec 28, 2022
55 Dec 28, 2022
Dilated Convolution with Learnable Spacings PyTorch
Dilated-Convolution-with-Learnable-Spacings-PyTorch Ismail Khalfaoui Hassani Dilated Convolution with Learnable Spacings (abbreviated to DCLS) is a no
 15 Dec 9, 2022
15 Dec 9, 2022
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
112 Dec 23, 2022
Bayesian Deep Learning and Deep Reinforcement Learning for Object Shape Error Response and Correction of Manufacturing Systems
Bayesian Deep Learning for Manufacturing 2.0 (dlmfg) Object Shape Error Response (OSER) Digital Lifecycle Management - In Process Quality Improvement
 30 Oct 31, 2022
30 Oct 31, 2022
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021)
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021) This is the implementation of PSD (ICCV 2021),
 12 Dec 12, 2022
12 Dec 12, 2022

This is implementation of AlexNet(2012) with 3D Convolution on TensorFlow (AlexNet 3D).
AlexNet_3dConv TensorFlow implementation of AlexNet(2012) by Alex Krizhevsky, with 3D convolutiional layers. 3D AlexNet Network with a standart AlexNe
 41 Jan 16, 2022
41 Jan 16, 2022

Re-implement CycleGAN in Tensorlayer
CycleGAN_Tensorlayer Re-implement CycleGAN in TensorLayer Original CycleGAN Improved CycleGAN with resize-convolution Prerequisites: TensorLayer Tenso
 89 Aug 15, 2022
89 Aug 15, 2022
Deconfounding Temporal Autoencoder: Estimating Treatment Effects over Time Using Noisy Proxies
Deconfounding Temporal Autoencoder (DTA) This is a repository for the paper "Deconfounding Temporal Autoencoder: Estimating Treatment Effects over Tim
 3 Feb 4, 2022
3 Feb 4, 2022

PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds
PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds PCAM: Product of Cross-Attention Matrices for Rigid Registration of P
24 May 31, 2022
Efficient Two-Step Networks for Temporal Action Segmentation (Neurocomputing 2021)
Efficient Two-Step Networks for Temporal Action Segmentation This repository provides a PyTorch implementation of the paper Efficient Two-Step Network
 8 Apr 16, 2022
8 Apr 16, 2022

Code for paper Decoupled Dynamic Spatial-Temporal Graph Neural Network for Traffic Forecasting
Decoupled Spatial-Temporal Graph Neural Networks Code for our paper: Decoupled Dynamic Spatial-Temporal Graph Neural Network for Traffic Forecasting.
 43 Jan 4, 2023
43 Jan 4, 2023

Diffusion Probabilistic Models for 3D Point Cloud Generation (CVPR 2021)
Diffusion Probabilistic Models for 3D Point Cloud Generation [Paper] [Code] The official code repository for our CVPR 2021 paper "Diffusion Probabilis
 323 Jan 5, 2023
323 Jan 5, 2023

Score-Based Point Cloud Denoising (ICCV'21)
Score-Based Point Cloud Denoising (ICCV'21) [Paper] https://arxiv.org/abs/2107.10981 Installation Recommended Environment The code has been tested in
79 Dec 26, 2022

Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds DLO is a lightweight and computationally-efficient frontend LiDAR odometry solution w
 369 Dec 30, 2022
369 Dec 30, 2022
Spatial Temporal Graph Convolutional Networks (ST-GCN) for Skeleton-Based Action Recognition in PyTorch
Reminder ST-GCN has transferred to MMSkeleton, and keep on developing as an flexible open source toolbox for skeleton-based human understanding. You a
 1.1k Dec 25, 2022
1.1k Dec 25, 2022
Video Frame Interpolation without Temporal Priors (a general method for blurry video interpolation)
Video Frame Interpolation without Temporal Priors (NeurIPS2020) [Paper] [video] How to run Prerequisites NVIDIA GPU + CUDA 9.0 + CuDNN 7.6.5 Pytorch 1
 31 Sep 4, 2022
31 Sep 4, 2022
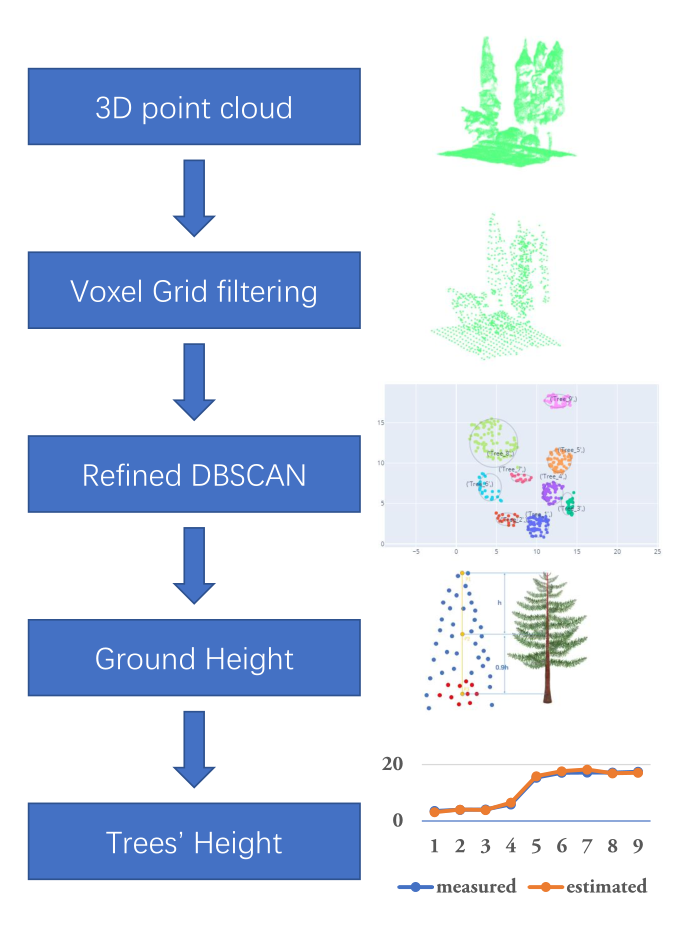
A simple algorithm for extracting tree height in sparse scene from point cloud data.
TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING This is the offical python implementation of the paper "Tree Height Extraction in
 6 Oct 28, 2022
6 Oct 28, 2022
Graph Self-Attention Network for Learning Spatial-Temporal Interaction Representation in Autonomous Driving
GSAN Introduction Code for paper GSAN: Graph Self-Attention Network for Learning Spatial-Temporal Interaction Representation in Autonomous Driving, wh
 6 Oct 27, 2022
6 Oct 27, 2022
Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
XDR Tuner Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
 16 Dec 28, 2022
16 Dec 28, 2022
Code & Models for Temporal Segment Networks (TSN) in ECCV 2016
Temporal Segment Networks (TSN) We have released MMAction, a full-fledged action understanding toolbox based on PyTorch. It includes implementation fo
 1.4k Jan 1, 2023
1.4k Jan 1, 2023

DeepFill v1/v2 with Contextual Attention and Gated Convolution, CVPR 2018, and ICCV 2019 Oral
Generative Image Inpainting An open source framework for generative image inpainting task, with the support of Contextual Attention (CVPR 2018) and Ga
 2.9k Dec 16, 2022
2.9k Dec 16, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
 957 Dec 21, 2022
957 Dec 21, 2022

MXNet implementation for: Drop an Octave: Reducing Spatial Redundancy in Convolutional Neural Networks with Octave Convolution
Octave Convolution MXNet implementation for: Drop an Octave: Reducing Spatial Redundancy in Convolutional Neural Networks with Octave Convolution Imag
 549 Dec 28, 2022
549 Dec 28, 2022
Revisiting Temporal Alignment for Video Restoration
Revisiting Temporal Alignment for Video Restoration [arXiv] Kun Zhou, Wenbo Li, Liying Lu, Xiaoguang Han, Jiangbo Lu We provide our results at Google
 52 Dec 25, 2022
52 Dec 25, 2022

Official implementation of Representer Point Selection via Local Jacobian Expansion for Post-hoc Classifier Explanation of Deep Neural Networks and Ensemble Models at NeurIPS 2021
Representer Point Selection via Local Jacobian Expansion for Classifier Explanation of Deep Neural Networks and Ensemble Models This repository is the
 2 Dec 1, 2021
2 Dec 1, 2021
Interpretable and Generalizable Person Re-Identification with Query-Adaptive Convolution and Temporal Lifting
QAConv Interpretable and Generalizable Person Re-Identification with Query-Adaptive Convolution and Temporal Lifting This PyTorch code is proposed in
 166 Dec 28, 2022
166 Dec 28, 2022

Discovering Dynamic Salient Regions with Spatio-Temporal Graph Neural Networks
Discovering Dynamic Salient Regions with Spatio-Temporal Graph Neural Networks This is the official code for DyReg model inroduced in Discovering Dyna
 11 Nov 8, 2022
11 Nov 8, 2022
Toolbox to analyze temporal context invariance of deep neural networks
PyTCI A toolbox that estimates the integration window of a sensory response using the "Temporal Context Invariance" paradigm (TCI). The TCI method Int
 4 Oct 23, 2022
4 Oct 23, 2022
Official implementation of the NeurIPS 2021 paper Online Learning Of Neural Computations From Sparse Temporal Feedback
Online Learning Of Neural Computations From Sparse Temporal Feedback This repository is the official implementation of the NeurIPS 2021 paper Online L
 3 Dec 15, 2021
3 Dec 15, 2021
This is the face keypoint train code of project face-detection-project
face-key-point-pytorch 1. Data structure The structure of landmarks_jpg is like below: |--landmarks_jpg |----AFW |------AFW_134212_1_0.jpg |------AFW_
 3 Nov 27, 2022
3 Nov 27, 2022

Pre-Training 3D Point Cloud Transformers with Masked Point Modeling
Point-BERT: Pre-Training 3D Point Cloud Transformers with Masked Point Modeling Created by Xumin Yu*, Lulu Tang*, Yongming Rao*, Tiejun Huang, Jie Zho
 306 Jan 6, 2023
306 Jan 6, 2023
PyTorch implementation of Pointnet2/Pointnet++
Pointnet2/Pointnet++ PyTorch Project Status: Unmaintained. Due to finite time, I have no plans to update this code and I will not be responding to iss
 1.2k Dec 29, 2022
1.2k Dec 29, 2022

Background-Click Supervision for Temporal Action Localization
Background-Click Supervision for Temporal Action Localization This repository is the official implementation of BackTAL. In this work, we study the te
 221 Oct 9, 2022
221 Oct 9, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

Kernel Point Convolutions
Created by Hugues THOMAS Introduction Update 27/04/2020: New PyTorch implementation available. With SemanticKitti, and Windows supported. This reposit
 584 Jan 7, 2023
584 Jan 7, 2023

PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud, CVPR 2019.
PointRCNN PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud Code release for the paper PointRCNN:3D Object Proposal Generation a
 1.5k Dec 27, 2022
1.5k Dec 27, 2022
![Deep Video Matting via Spatio-Temporal Alignment and Aggregation [CVPR2021]](https://github.com/nowsyn/DVM/raw/master/figures/framework.png)
Deep Video Matting via Spatio-Temporal Alignment and Aggregation [CVPR2021]
Deep Video Matting via Spatio-Temporal Alignment and Aggregation [CVPR2021] Paper: https://arxiv.org/abs/2104.11208 Introduction Despite the significa
 76 Dec 7, 2022
76 Dec 7, 2022

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
 3.2k Dec 31, 2022
3.2k Dec 31, 2022
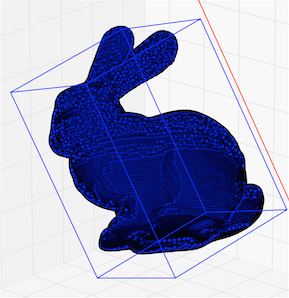
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
ApproxMVBB Status Build UnitTests Homepage Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in
 390 Dec 31, 2022
390 Dec 31, 2022
Spatial Sparse Convolution Library
SpConv: Spatially Sparse Convolution Library PyPI Install Downloads CPU (Linux Only) pip install spconv CUDA 10.2 pip install spconv-cu102 CUDA 11.1 p
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

Point Cloud Registration Network
PCRNet: Point Cloud Registration Network using PointNet Encoding Source Code Author: Vinit Sarode and Xueqian Li Paper | Website | Video | Pytorch Imp
 59 Nov 19, 2022
59 Nov 19, 2022

TeST: Temporal-Stable Thresholding for Semi-supervised Learning
TeST: Temporal-Stable Thresholding for Semi-supervised Learning TeST Illustration Semi-supervised learning (SSL) offers an effective method for large-
 1 Jul 14, 2022
1 Jul 14, 2022

Source code for Fixed-Point GAN for Cloud Detection
FCD: Fixed-Point GAN for Cloud Detection PyTorch source code of Nyborg & Assent (2020). Abstract The detection of clouds in satellite images is an ess
 8 Dec 22, 2022
8 Dec 22, 2022
Modeling Temporal Concept Receptive Field Dynamically for Untrimmed Video Analysis
Modeling Temporal Concept Receptive Field Dynamically for Untrimmed Video Analysis This is a PyTorch implementation of the model described in our pape
 6 Jul 8, 2021
6 Jul 8, 2021

Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
 29 Nov 25, 2021
29 Nov 25, 2021

Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes
Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes [Paper] Method overview 4DMatch Benchmark 4DMatch is a benchmark for matc
 103 Jan 6, 2023
103 Jan 6, 2023

Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion". Paper link: https://arxiv.org/abs/2111.10
 10 Nov 24, 2021
10 Nov 24, 2021

A hybrid SOTA solution of LiDAR panoptic segmentation with C++ implementations of point cloud clustering algorithms. ICCV21, Workshop on Traditional Computer Vision in the Age of Deep Learning
ICCVW21-TradiCV-Survey-of-LiDAR-Cluster Motivation In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a
 103 Nov 22, 2022
103 Nov 22, 2022
Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
93 Dec 15, 2022
The Most Efficient Temporal Difference Learning Framework for 2048
moporgic/TDL2048+ TDL2048+ is a highly optimized temporal difference (TD) learning framework for 2048. Features Many common methods related to 2048 ar
 5 Nov 23, 2022
5 Nov 23, 2022
Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS)
This repository contains tools to simulate the ground filtering process of a registered point cloud. The repository contains two filtering methods. The first method uses a normal vector, and fit to plane. The second method utilizes voxel adjacency, and fit to plane.
 5 Aug 25, 2022
5 Aug 25, 2022

PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018
PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place
 294 Dec 12, 2022
294 Dec 12, 2022

This is an official implementation for "Exploiting Temporal Contexts with Strided Transformer for 3D Human Pose Estimation".
Exploiting Temporal Contexts with Strided Transformer for 3D Human Pose Estimation This repo is the official implementation of Exploiting Temporal Con
 241 Jan 7, 2023
241 Jan 7, 2023

Ultra-lightweight human body posture key point CNN model. ModelSize:2.3MB HUAWEI P40 NCNN benchmark: 6ms/img,
Ultralight-SimplePose Support NCNN mobile terminal deployment Based on MXNET(=1.5.1) GLUON(=0.7.0) framework Top-down strategy: The input image is t
 223 Dec 27, 2022
223 Dec 27, 2022
Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion" Coming soon, as soon as I finish a
14 Feb 26, 2022

Some method of processing point cloud
Point-Cloud Some method of processing point cloud inversion the completion pointcloud to incomplete point cloud Some model of encoding point cloud to
 1 Nov 19, 2021
1 Nov 19, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
 11 Dec 9, 2022
11 Dec 9, 2022
TYolov5: A Temporal Yolov5 Detector Based on Quasi-Recurrent Neural Networks for Real-Time Handgun Detection in Video
TYolov5: A Temporal Yolov5 Detector Based on Quasi-Recurrent Neural Networks for Real-Time Handgun Detection in Video Timely handgun detection is a cr
 18 Dec 26, 2022
18 Dec 26, 2022