210 Repositories
Python flight-simulation Libraries

Python toolkit for defining+simulating+visualizing+analyzing attractors, dynamical systems, iterated function systems, roulette curves, and more
Attractors A small module that provides functions and classes for very efficient simulation and rendering of iterated function systems; dynamical syst
 1 Aug 4, 2021
1 Aug 4, 2021

BIGDATA SIMULATION ONE PIECE WORLD CENSUS
ONE PIECE is a Japanese manga of great international success. The story turns inhabited in a fictional world, tells the adventures of a young man whose body gained rubber properties after accidentally eating a devil fruit (AKUMA NO MI).
 3 Jun 30, 2022
3 Jun 30, 2022

A demo of how to use JAX to create a simple gravity simulation
JAX Gravity This repo contains a demo of how to use JAX to create a simple gravity simulation. It uses JAX's experimental ode package to solve the dif
 16 Sep 22, 2022
16 Sep 22, 2022

Simulate Attacks With Mininet And Hping3
Miniattack Simulate Attacks With Mininet And Hping3 It measures network load with bwm-ng when the net is under attack and plots the result. This demo
 3 Oct 3, 2022
3 Oct 3, 2022
An automatic reaction network generator for reactive molecular dynamics simulation.
ReacNetGenerator An automatic reaction network generator for reactive molecular dynamics simulation. ReacNetGenerator: an automatic reaction network g
 35 Dec 14, 2022
35 Dec 14, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022
Step by step development of a vending coffee machine project, including tkinter, sqlite3, simulation, etc.
Step by step development of a vending coffee machine project, including tkinter, sqlite3, simulation, etc.
 2 Dec 5, 2021
2 Dec 5, 2021
Verification of Monty Hall problem by experimental simulation.
Verification of Monty Hall problem by experimental simulation. |中文|English| In the process of learning causal inference, I learned about the Monty Hal
 1 Nov 22, 2022
1 Nov 22, 2022

Numba-accelerated Pythonic implementation of MPDATA with examples in Python, Julia and Matlab
PyMPDATA PyMPDATA is a high-performance Numba-accelerated Pythonic implementation of the MPDATA algorithm of Smolarkiewicz et al. used in geophysical
 15 Nov 23, 2022
15 Nov 23, 2022
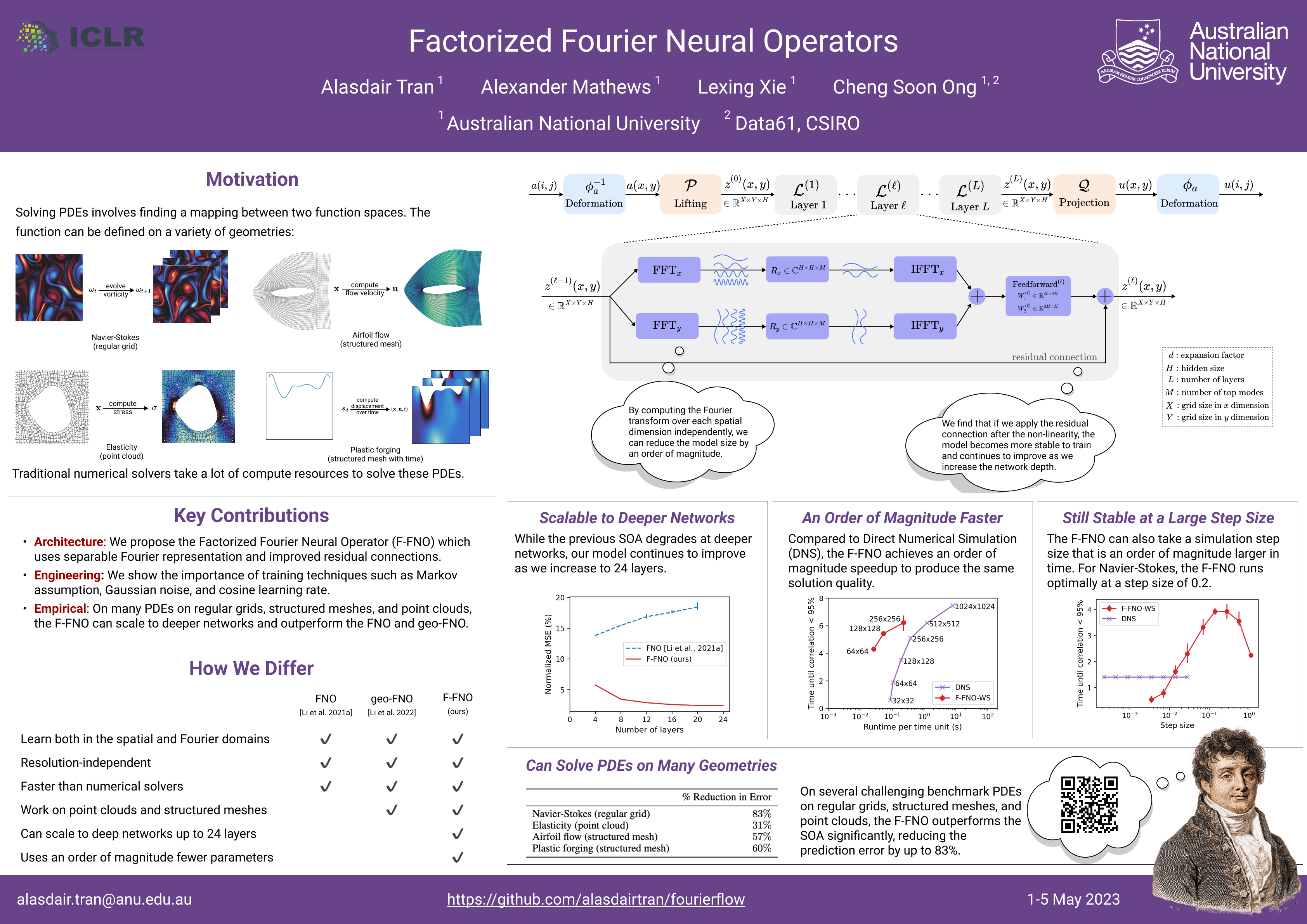
Experiments with Fourier layers on simulation data.
Factorized Fourier Neural Operators This repository contains the code to reproduce the results in our NeurIPS 2021 ML4PS workshop paper, Factorized Fo
 57 Dec 25, 2022
57 Dec 25, 2022
tmm_fast is a lightweight package to speed up optical planar multilayer thin-film device computation.
tmm_fast tmm_fast or transfer-matrix-method_fast is a lightweight package to speed up optical planar multilayer thin-film device computation. It is es
 26 Dec 11, 2022
26 Dec 11, 2022
Tools for the analysis, simulation, and presentation of Lorentz TEM data.
ltempy ltempy is a set of tools for Lorentz TEM data analysis, simulation, and presentation. Features Single Image Transport of Intensity Equation (SI
 1 Dec 26, 2022
1 Dec 26, 2022

Multi Agent Reinforcement Learning for ROS in 2D Simulation Environments
IROS21 information To test the code and reproduce the experiments, follow the installation steps in Installation.md. Afterwards, follow the steps in E
 11 Oct 29, 2022
11 Oct 29, 2022

A Python implementation of the Robotics Toolbox for MATLAB
Robotics Toolbox for Python A Python implementation of the Robotics Toolbox for MATLAB® GitHub repository Documentation Wiki (examples and details) Sy
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

2D fluid simulation implementation of Jos Stam paper on real-time fuild dynamics, including some suggested extensions.
Fluid Simulation Usage Download this repo and store it in your computer. Open a terminal and go to the root directory of this folder. Make sure you ha
 5 Dec 2, 2022
5 Dec 2, 2022
HSPICE can not perform Monte Carlo (MC) simulations while considering aging effects
HSPICE can not perform Monte Carlo (MC) simulations while considering aging effects. I developed a python wrapper that automatically performs MC and aging simulations using HPSICE to save engineering hours.
 2 Nov 22, 2021
2 Nov 22, 2021
PVE with tcaledger app for payments and simulation of payment requests
tcaledger PVE with tcaledger app for payments and simulation of payment requests. The purpose of this API is to empower users to accept cryptocurrenci
 3 Jan 29, 2022
3 Jan 29, 2022
This is a a CSMA/CA simulator written in Python based on simulator of the same type
This is a a CSMA/CA simulator written in Python based on simulator of the same type found the link https://github.com/StevenSLXie/CSMA-Simulator with
 4 Nov 22, 2022
4 Nov 22, 2022
Simulation of Self Driving Car
In this repository, the code to use Udacity's self driving car simulator as a testbed for training an autonomous car are provided.
 1 Nov 21, 2021
1 Nov 21, 2021
 1 Nov 21, 2021
1 Nov 21, 2021

It's an application to calculate I from v and r. It can also plot a graph between V vs I.
Ohm-s-Law-Visualizer It's an application to calculate I from v and r using Ohm's Law. It can also plot a graph between V vs I. Story I'm doing my Unde
 1 Nov 20, 2021
1 Nov 20, 2021
Simulation code and tutorial for BBHnet training data
Simulation Dataset for BBHnet NOTE: OLD README, UPDATE IN PROGRESS We generate simulation dataset to train BBHnet, our deep learning framework for det
 0 May 31, 2022
0 May 31, 2022
Django React Flight Rezervation
Django Intro & Installation python -m venv venv source ./venv/Scripts/activate pip install Django pip install djangorestframework pip install python-d
 2 May 26, 2022
2 May 26, 2022

Generative Adversarial Networks for High Energy Physics extended to a multi-layer calorimeter simulation
CaloGAN Simulating 3D High Energy Particle Showers in Multi-Layer Electromagnetic Calorimeters with Generative Adversarial Networks. This repository c
 101 Nov 13, 2022
101 Nov 13, 2022
Training, generation, and analysis code for Learning Particle Physics by Example: Location-Aware Generative Adversarial Networks for Physics
Location-Aware Generative Adversarial Networks (LAGAN) for Physics Synthesis This repository contains all the code used in L. de Oliveira (@lukedeo),
57 Oct 22, 2022
Simulation of early COVID-19 using SIR model and variants (SEIR ...).
COVID-19-simulation Simulation of early COVID-19 using SIR model and variants (SEIR ...). Made by the Laboratory of Sustainable Life Assessment (GYRO)
 1 Nov 17, 2021
1 Nov 17, 2021
Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS 2021), and the code to generate simulation results.
Scalable Intervention Target Estimation in Linear Models Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS
 0 Oct 25, 2021
0 Oct 25, 2021
Create large-scale ML-driven multiscale simulation ensembles to study the interactions
MuMMI RAS v0.1 Released: Nov 16, 2021 MuMMI RAS is the application component of the MuMMI framework developed to create large-scale ML-driven multisca
 4 Feb 16, 2022
4 Feb 16, 2022
Web service load balancing simulation experiment.
Web service load balancing simulation experiment.
 1 Nov 12, 2021
1 Nov 12, 2021
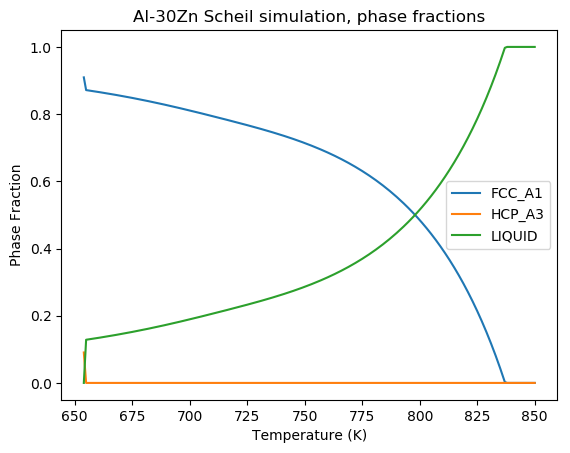
A Scheil-Gulliver simulation tool using pycalphad.
scheil A Scheil-Gulliver simulation tool using pycalphad. import matplotlib.pyplot as plt from pycalphad import Database, variables as v from scheil i
 6 Dec 10, 2021
6 Dec 10, 2021
Powerful, efficient particle trajectory analysis in scientific Python.
freud Overview The freud Python library provides a simple, flexible, powerful set of tools for analyzing trajectories obtained from molecular dynamics
 195 Dec 20, 2022
195 Dec 20, 2022
Pytools is an open source library containing general machine learning and visualisation utilities for reuse
pytools is an open source library containing general machine learning and visualisation utilities for reuse, including: Basic tools for API developmen
 26 Nov 6, 2022
26 Nov 6, 2022

Investigating automatic navigation towards standard US views integrating MARL with the virtual US environment developed in CT2US simulation
AutomaticUSnavigation Investigating automatic navigation towards standard US views integrating MARL with the virtual US environment developed in CT2US
 6 Dec 5, 2022
6 Dec 5, 2022
A small fun project to simulate Conway's Game of Life, created in Python.
A small fun project to simulate Conway's Game of Life, created in Python. Conway's Game of Life simulates a grid of cells, where the state of each cell consists of whether the cell is alive or dead.
 1 Jun 19, 2022
1 Jun 19, 2022

This package is a python library with tools for the Molecular Simulation - Software Gromos.
This package is a python library with tools for the Molecular Simulation - Software Gromos. It allows you to easily set up, manage and analyze simulations in python.
 14 Sep 28, 2022
14 Sep 28, 2022
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python THIS PROJECT IS CURRENTLY A WORK IN PROGRESS AND THUS THIS REPOSITORY I
 14 Dec 31, 2022
14 Dec 31, 2022

Store Simulation
Almacenes Para clonar el Repositorio: Vaya a la terminal de Linux o Mac, o a la cmd en Windows y ejecute:
 1 Nov 12, 2021
1 Nov 12, 2021
Suite of tools for retrieving USGS NWIS observations and evaluating National Water Model (NWM) data.
Documentation OWPHydroTools GitHub pages documentation Motivation We developed OWPHydroTools with data scientists in mind. We attempted to ensure the
 36 Dec 11, 2022
36 Dec 11, 2022
Agent-based model simulator for air quality and pandemic risk assessment in architectural spaces
Agent-based model simulation for air quality and pandemic risk assessment in architectural spaces. User Guide archABM is a fast and open source agent-
 10 Dec 5, 2022
10 Dec 5, 2022
Python module for creating the circuit simulation definitions for Elmer FEM
elmer_circuitbuilder Python module for creating the circuit simulation definitions for Elmer FEM. The circuit definitions enable easy setup of coils (
 5 Oct 3, 2022
5 Oct 3, 2022
Aero is an open source airplane intelligence tool. Aero supports more than 13,000 airlines and 250 countries. Any flight worldwide at your fingertips.
Aero Aero supports more than 13,000 airlines and 250 countries. Any flight worldwide at your fingertips. Features Main : Flight lookup Aircraft lookup
 4 Oct 27, 2021
4 Oct 27, 2021
A totally unrealistic cell growth/reproduction simulation.
A totally unrealistic cell growth/reproduction simulation.
 1 Oct 24, 2021
1 Oct 24, 2021

FlingBot: The Unreasonable Effectiveness of Dynamic Manipulations for Cloth Unfolding
This repository contains code for training and evaluating FlingBot in both simulation and real-world settings on a dual-UR5 robot arm setup for Ubuntu 18.04
 70 Dec 6, 2022
70 Dec 6, 2022

A lightweight Python-based 3D network multi-agent simulator. Uses a cell-based congestion model. Calculates risk, loudness and battery capacities of the agents. Suitable for 3D network optimization tasks.
AMAZ3DSim AMAZ3DSim is a lightweight python-based 3D network multi-agent simulator. It uses a cell-based congestion model. It calculates risk, battery
 13 Nov 4, 2022
13 Nov 4, 2022
A short non 100% Accurate Solar System in pygame
solar-system-pygame Controls UP/DOWN for Emulation Speed Control ESC for Pause/Unpause q to Quit c or ESC again to Continue LEFT CLICK to Add an orbit
 2 May 28, 2022
2 May 28, 2022

Ackermann Line Follower Robot Simulation.
Ackermann Line Follower Robot This is a simulation of a line follower robot that works with steering control based on Stanley: The Robot That Won the
 2 Apr 16, 2022
2 Apr 16, 2022

Free,Cross-platform,Single-file mass network protocol server simulator
FaPro Free,Cross-platform,Single-file mass network protocol server simulator 中文Readme Description FaPro is a Fake Protocol Server tool, Can easily sta
 1.4k Jan 6, 2023
1.4k Jan 6, 2023
Zeus is an open source flight intellingence tool which supports more than 13,000+ airlines and 250+ countries.
Zeus Zeus is an open source flight intellingence tool which supports more than 13,000+ airlines and 250+ countries. Any flight worldwide, at your fing
 1 Oct 22, 2021
1 Oct 22, 2021
Arknights gacha simulation written in Python
Welcome to arknights-gacha repository This is my shameless attempt of simulating Arknights gacha. Current supported banner types (with potential bugs)
 3 May 7, 2022
3 May 7, 2022
Python tool to make adding to your armory spreadsheet armory less of a pain.
Python tool to make adding to your armory spreadsheet armory slightly less of a pain by creating a CSV to simply copy and paste.
 1 Oct 20, 2021
1 Oct 20, 2021
DeepMind's software stack for physics-based simulation and Reinforcement Learning environments, using MuJoCo.
dm_control: DeepMind Infrastructure for Physics-Based Simulation. DeepMind's software stack for physics-based simulation and Reinforcement Learning en
 3k Dec 31, 2022
3k Dec 31, 2022
PyTorch code for DriveGAN: Towards a Controllable High-Quality Neural Simulation
PyTorch code for DriveGAN: Towards a Controllable High-Quality Neural Simulation
 76 Dec 24, 2022
76 Dec 24, 2022

Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.
Robotic Arm Simulation in ROS2 and Gazebo General Overview This repository includes: First, how to simulate a 6DoF Robotic Arm from scratch using GAZE
 12 Jan 2, 2023
12 Jan 2, 2023
Official implementation of the NRNS paper: No RL, No Simulation: Learning to Navigate without Navigating
No RL No Simulation (NRNS) Official implementation of the NRNS paper: No RL, No Simulation: Learning to Navigate without Navigating NRNS is a heriarch
 20 Nov 29, 2022
20 Nov 29, 2022
A simple DHCP server and client simulation with python
About The Project This is a simple DHCP server and client simulation. I implemented it for computer network course spring 2021 The client can request
 3 Feb 8, 2022
3 Feb 8, 2022
Anomaly detection in multi-agent trajectories: Code for training, evaluation and the OpenAI highway simulation.
Anomaly Detection in Multi-Agent Trajectories for Automated Driving This is the official project page including the paper, code, simulation, baseline
 12 Dec 2, 2022
12 Dec 2, 2022
Time-Optimal Planning for Quadrotor Waypoint Flight
Time-Optimal Planning for Quadrotor Waypoint Flight This is an example implementation of the paper "Time-Optimal Planning for Quadrotor Waypoint Fligh
 38 Dec 2, 2022
38 Dec 2, 2022

Pendulum Simulation using Pygame
Pendulum project, built using pygame and math modules.
 3 Nov 9, 2021
3 Nov 9, 2021
BioMASS - A Python Framework for Modeling and Analysis of Signaling Systems
Mathematical modeling is a powerful method for the analysis of complex biological systems. Although there are many researches devoted on produ
 22 Dec 27, 2022
22 Dec 27, 2022
pulse2percept: A Python-based simulation framework for bionic vision
pulse2percept: A Python-based simulation framework for bionic vision Retinal degenerative diseases such as retinitis pigmentosa and macular degenerati
 67 Dec 29, 2022
67 Dec 29, 2022
CrayLabs and user contibuted examples of using SmartSim for various simulation and machine learning applications.
SmartSim Example Zoo This repository contains CrayLabs and user contibuted examples of using SmartSim for various simulation and machine learning appl
 14 Mar 30, 2022
14 Mar 30, 2022

Simulation-based inference for the Galactic Center Excess
Simulation-based inference for the Galactic Center Excess Siddharth Mishra-Sharma and Kyle Cranmer Abstract The nature of the Fermi gamma-ray Galactic
 3 Jan 21, 2022
3 Jan 21, 2022

IsoGCN code for ICLR2021
IsoGCN The official implementation of IsoGCN, presented in the ICLR2021 paper Isometric Transformation Invariant and Equivariant Graph Convolutional N
 39 Nov 25, 2022
39 Nov 25, 2022

 4 Nov 2, 2022
4 Nov 2, 2022

Code related to the manuscript "Averting A Crisis In Simulation-Based Inference"
Abstract We present extensive empirical evidence showing that current Bayesian simulation-based inference algorithms are inadequate for the falsificat
 3 Nov 14, 2022
3 Nov 14, 2022
Network Dynaimcs Simulation
A Final Year Project in CUHK, Autumn 2021 Network Dynaimcs Simulation Files param.h edit all the variables & settings here simulate.c the main program
 0 Mar 28, 2022
0 Mar 28, 2022

Simulation artifacts, core components and configuration files to integrate AWS DeepRacer device with ROS Navigation stack.
AWS DeepRacer Overview The AWS DeepRacer Evo vehicle is a 1/18th scale Wi-Fi enabled 4-wheel ackermann steering platform that features two RGB cameras
 31 Nov 21, 2022
31 Nov 21, 2022

Learning High-Speed Flight in the Wild
Learning High-Speed Flight in the Wild This repo contains the code associated to the paper Learning Agile Flight in the Wild. For more information, pl
391 Dec 29, 2022
A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of a custom mass and velocity within the simulation, select what specifically is displayed, and move the camera.
Python-Orbit-Sim A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of
 3 Oct 22, 2021
3 Oct 22, 2021
Short Program using Transavia's API to notify via email an user waiting for a flight at special dates and with the best price
Flight-Notifier Short Program using Transavia's API to notify via email an user waiting for a flight at special dates and with the best price Algorith
 2 Apr 10, 2022
2 Apr 10, 2022
A battery pack simulation tool that uses the PyBaMM framework
Overview of liionpack liionpack takes a 1D PyBaMM model and makes it into a pack. You can either specify the configuration e.g. 16 cells in parallel a
 40 Jan 5, 2023
40 Jan 5, 2023
Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs
PhyCRNet Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs Paper link: [ArXiv] By: Pu Ren, Chengping Rao, Yang
 11 Aug 23, 2022
11 Aug 23, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023
Event-based hardware simulation framework
An event-based multi-device simulation framework providing configuration and orchestration of complex multi-device simulations.
 3 Feb 1, 2022
3 Feb 1, 2022

XPlaneROS is a ROS wrapper for the XPlane-11 flight simulator.
XPlaneROS XPlaneROS is a ROS wrapper for the XPlane-11 flight simulator. The wrapper provides functionality for extracting aircraft data from the simu
 26 Dec 4, 2022
26 Dec 4, 2022
Monte Carlo simulation of 3G rules
mc3g Monte Carlo simulation of 3G rules This project contains the Python code to do simulations of events according to the 3G rule (in German: "Geimpf
 4 Nov 1, 2021
4 Nov 1, 2021
Simulation of the solar system using various nummerical methods
solar-system Simulation of the solar system using various nummerical methods Download the repo Make shure matplotlib, scipy etc. are installed execute
 7 Jul 15, 2022
7 Jul 15, 2022

A web app for presenting my research in BEM(building energy model) simulation
BEM(building energy model)-SIM-APP The is a web app presenting my research in BEM(building energy model) calibration. You can play around with some pa
 8 Sep 3, 2021
8 Sep 3, 2021

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

A generalized framework for prototyping full-stack cooperative driving automation applications under CARLA+SUMO.
OpenCDA OpenCDA is a SIMULATION tool integrated with a prototype cooperative driving automation (CDA; see SAE J3216) pipeline as well as regular autom
 726 Dec 29, 2022
726 Dec 29, 2022

Attractors is a package for simulation and visualization of strange attractors.
attractors Attractors is a package for simulation and visualization of strange attractors. Installation The simplest way to install the module is via
 45 Jul 31, 2022
45 Jul 31, 2022

NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation (ACL-IJCNLP 2021)
NeuralWOZ This code is official implementation of "NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation". Sungdong Kim, Mi
 31 Oct 25, 2022
31 Oct 25, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022
SmartSim Infrastructure Library.
Home Install Documentation Slack Invite Cray Labs SmartSim SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and Ten
139 Jan 1, 2023
Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research
Megaverse Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research. The efficient design of the engine enables ph
 191 Dec 23, 2022
191 Dec 23, 2022
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow, in High Performance Computing (HPC) simulations and workloads.
139 Jan 1, 2023
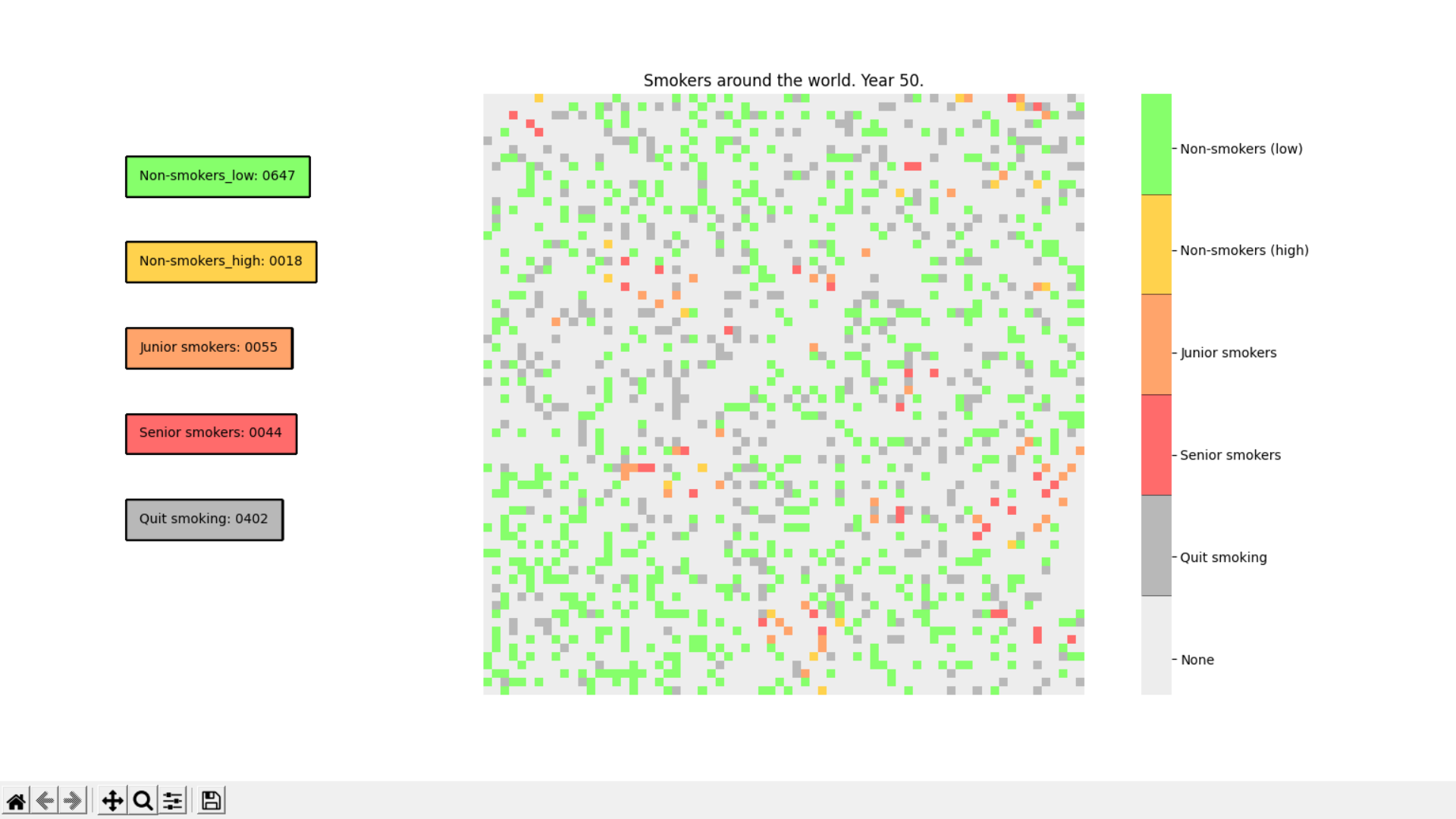
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain amount of time.
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain
 5 Nov 8, 2022
5 Nov 8, 2022
MDAnalysis tool to calculate membrane curvature.
The MDAkit for membrane curvature analysis is part of the Google Summer of Code program and it is linked to a Code of Conduct.
 19 Oct 20, 2022
19 Oct 20, 2022
Notspot robot simulation - Python version
Notspot robot simulation - Python version This repository contains all the files and code needed to simulate the notspot quadrupedal robot using Gazeb
 50 Sep 26, 2022
50 Sep 26, 2022
A simple 3D rigid body simulation written in python
pyRigidBody3d A simple 3D rigid body simulation written in python
 30 Oct 7, 2022
30 Oct 7, 2022
A custom-designed Spider Robot trained to walk using Deep RL in a PyBullet Simulation
SpiderBot_DeepRL Title: Implementation of Single and Multi-Agent Deep Reinforcement Learning Algorithms for a Walking Spider Robot Authors(s): Arijit
 9 Jul 28, 2022
9 Jul 28, 2022

Civsim is a basic civilisation simulation and modelling system built in Python 3.8.
Civsim Introduction Civsim is a basic civilisation simulation and modelling system built in Python 3.8. It requires the following packages: perlin_noi
 17 Aug 8, 2022
17 Aug 8, 2022
Python implementation of the ASFLIP advection method
This is a python implementation of the ASFLIP advection method . We would like to hear from you if you appreciate this work.
 133 Nov 13, 2022
133 Nov 13, 2022
RecSim NG: Toward Principled Uncertainty Modeling for Recommender Ecosystems
RecSim NG, a probabilistic platform for multi-agent recommender systems simulation. RecSimNG is a scalable, modular, differentiable simulator implemented in Edward2 and TensorFlow. It offers: a powerful, general probabilistic programming language for agent-behavior specification;
 110 Dec 16, 2022
110 Dec 16, 2022

PyDy, short for Python Dynamics, is a tool kit written in the Python
PyDy, short for Python Dynamics, is a tool kit written in the Python programming language that utilizes an array of scientific programs to enable the study of multibody dynamics. The goal is to have a modular framework and eventually a physics abstraction layer which utilizes a variety of backends that can provide the user with their desired workflow
 307 Jan 1, 2023
307 Jan 1, 2023

Differentiable simulation for system identification and visuomotor control
gradsim gradSim: Differentiable simulation for system identification and visuomotor control gradSim is a unified differentiable rendering and multiphy
 105 Dec 18, 2022
105 Dec 18, 2022
:mag_right: :chart_with_upwards_trend: :snake: :moneybag: Backtest trading strategies in Python.
Backtesting.py Backtest trading strategies with Python. Project website Documentation the project if you use it. Installation $ pip install backtestin
 3.1k Dec 31, 2022
3.1k Dec 31, 2022

Open world survival environment for reinforcement learning
Crafter Open world survival environment for reinforcement learning. Highlights Crafter is a procedurally generated 2D world, where the agent finds foo
 213 Jan 5, 2023
213 Jan 5, 2023

A 35mm camera, based on the Canonet G-III QL17 rangefinder, simulated in Python.
c is for Camera A 35mm camera, based on the Canonet G-III QL17 rangefinder, simulated in Python. The purpose of this project is to explore and underst
 146 Sep 26, 2022
146 Sep 26, 2022