244 Repositories
Python lidar-camera-calibration Libraries
![[ ICCV 2021 Oral ] Our method can estimate camera poses and neural radiance fields jointly when the cameras are initialized at random poses in complex scenarios (outside-in scenes, even with less texture or intense noise )](https://github.com/MQ66/gnerf/raw/main/images/architecture.png)
[ ICCV 2021 Oral ] Our method can estimate camera poses and neural radiance fields jointly when the cameras are initialized at random poses in complex scenarios (outside-in scenes, even with less texture or intense noise )
GNeRF This repository contains official code for the ICCV 2021 paper: GNeRF: GAN-based Neural Radiance Field without Posed Camera. This implementation
 191 Dec 26, 2022
191 Dec 26, 2022

A hobby project which includes a hand-gesture based virtual piano using a mobile phone camera and OpenCV library functions
Overview This is a hobby project which includes a hand-gesture controlled virtual piano using an android phone camera and some OpenCV library. My moti
 1 Nov 19, 2021
1 Nov 19, 2021
Face Recognize System on camera AI OAK1
FRS on OAK1 Face Recognize System on camera OAK1 This project contains our work that deploy on camera OAK1 Features Anti-Spoofing Face detection Face
 6 Aug 8, 2022
6 Aug 8, 2022
FLIR/DJI IR Camera Data Parser, Python Version
FLIR/DJI IR Camera Data Parser, Python Version Parser infrared camera data as NumPy data. Usage Clone this respository and cd thermal_parser. Run pip
 14 Dec 23, 2022
14 Dec 23, 2022
Algorithms for calibrating power grid distribution system models
Distribution System Model Calibration Algorithms The code in this library was developed by Sandia National Laboratories under funding provided by the
 2 Oct 31, 2022
2 Oct 31, 2022
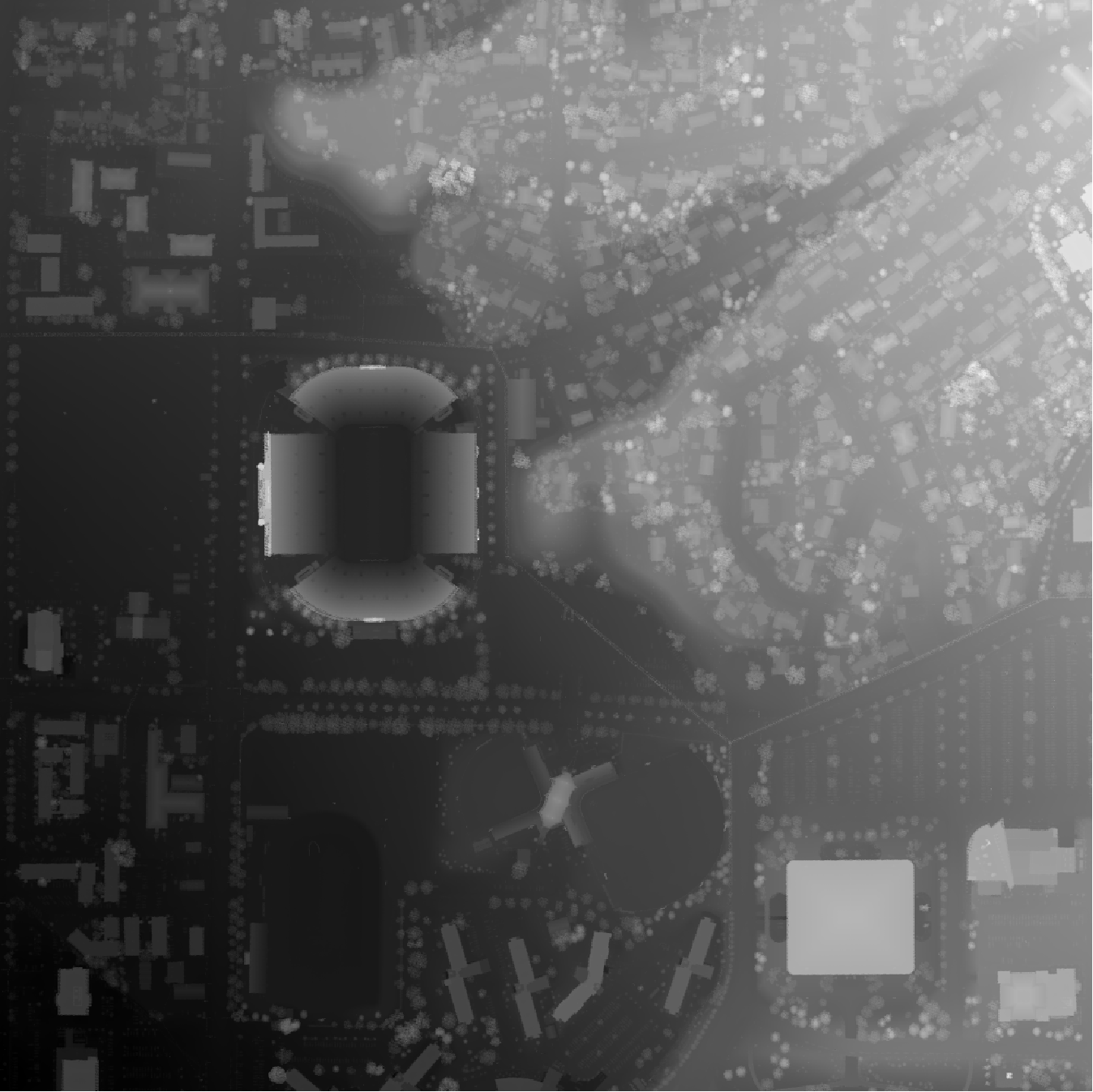
A tool for automatically generating 3D printable STLs from freely available lidar scan data.
mini-map-maker A tool for automatically generating 3D printable STLs from freely available lidar scan data. Screenshots Tutorial To use this script, g
 51 Nov 6, 2022
51 Nov 6, 2022
A free, multiplatform SDK for real-time facial motion capture using blendshapes, and rigid head pose in 3D space from any RGB camera, photo, or video.
mocap4face by Facemoji mocap4face by Facemoji is a free, multiplatform SDK for real-time facial motion capture based on Facial Action Coding System or
 591 Dec 27, 2022
591 Dec 27, 2022
Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation".
FPS-Net Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation", accepted by ISPRS journal of Photogrammetry
 15 Nov 30, 2022
15 Nov 30, 2022

Array Camera Ptychography
Array Camera Ptychography This repository provides the code for the following papers: Schulz, Timothy J., David J. Brady, and Chengyu Wang. "Photon-li
 1 Nov 15, 2021
1 Nov 15, 2021

A set of tools to pre-calibrate and calibrate (multi-focus) plenoptic cameras (e.g., a Raytrix R12) based on the libpleno.
COMPOTE: Calibration Of Multi-focus PlenOpTic camEra. COMPOTE is a set of tools to pre-calibrate and calibrate (multifocus) plenoptic cameras (e.g., a
 4 May 10, 2022
4 May 10, 2022

This codebase proposes modular light python and pytorch implementations of several LiDAR Odometry methods
pyLiDAR-SLAM This codebase proposes modular light python and pytorch implementations of several LiDAR Odometry methods, which can easily be evaluated
 208 Dec 16, 2022
208 Dec 16, 2022
![[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration](https://github.com/ispc-lab/HRegNet/raw/main/assets/overall.png)
[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration Introduction The repository contains the source code and pre-tr
 55 Dec 14, 2022
55 Dec 14, 2022

Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (ICCV 2021)
Exploring Simple 3D Multi-Object Tracking for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Exploring Simple 3D Multi-Object Tracking for
 141 Nov 21, 2022
141 Nov 21, 2022

Perception-aware multi-sensor fusion for 3D LiDAR semantic segmentation (ICCV 2021)
Perception-Aware Multi-Sensor Fusion for 3D LiDAR Semantic Segmentation (ICCV 2021) [中文|EN] 概述 本工作主要探索一种高效的多传感器(激光雷达和摄像头)融合点云语义分割方法。现有的多传感器融合方法主要将点云投影
 126 Dec 30, 2022
126 Dec 30, 2022

Official code and pretrained models for CTRL-C (Camera calibration TRansformer with Line-Classification).
CTRL-C: Camera calibration TRansformer with Line-Classification This repository contains the official code and pretrained models for CTRL-C (Camera ca
 35 Nov 8, 2021
35 Nov 8, 2021

A small Python Library to process Game Boy Camera images
GameBEye GameBEye is a Python Library to process Game Boy Camera images. Source code 📁 : https://github.com/mtouzot/GameBEye Issues 🆘 : https://gith
 4 Nov 25, 2022
4 Nov 25, 2022
Source code of NeurIPS 2021 Paper ''Be Confident! Towards Trustworthy Graph Neural Networks via Confidence Calibration''
CaGCN This repo is for source code of NeurIPS 2021 paper "Be Confident! Towards Trustworthy Graph Neural Networks via Confidence Calibration". Paper L
 6 Dec 19, 2022
6 Dec 19, 2022
A collection of tools for biomedical research assay analysis in Python.
waltlabtools A collection of tools for biomedical research assay analysis in Python. Key Features Analysis for assays such as digital ELISA, including
 1 Apr 18, 2022
1 Apr 18, 2022

Codes for CVPR2021 paper "PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization"
PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization (CVPR 2021) This is the official implementation of PW
 42 Dec 18, 2022
42 Dec 18, 2022
This is a Keras implementation of a CNN for estimating age, gender and mask from a camera.
face-detector-age-gender This is a Keras implementation of a CNN for estimating age, gender and mask from a camera. Before run face detector app, expr
 2 Dec 4, 2021
2 Dec 4, 2021

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023

This project is based on our SIGGRAPH 2021 paper, ROSEFusion: Random Optimization for Online DenSE Reconstruction under Fast Camera Motion .
ROSEFusion 🌹 This project is based on our SIGGRAPH 2021 paper, ROSEFusion: Random Optimization for Online DenSE Reconstruction under Fast Camera Moti
 219 Dec 27, 2022
219 Dec 27, 2022
Make OpenCV camera loops less of a chore by skipping the boilerplate and getting right to the interesting stuff
camloop Forget the boilerplate from OpenCV camera loops and get to coding the interesting stuff Table of Contents Usage Install Quickstart More advanc
 9 Nov 12, 2021
9 Nov 12, 2021

Camera Intrinsic Calibration and Hand-Eye Calibration in Pybullet
This repository is mainly for camera intrinsic calibration and hand-eye calibration. Synthetic experiments are conducted in PyBullet simulator. 1. Tes
 7 Oct 3, 2022
7 Oct 3, 2022

Improving Calibration for Long-Tailed Recognition (CVPR2021)
MiSLAS Improving Calibration for Long-Tailed Recognition Authors: Zhisheng Zhong, Jiequan Cui, Shu Liu, Jiaya Jia [arXiv] [slide] [BibTeX] Introductio
 116 Dec 20, 2022
116 Dec 20, 2022

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
 19 Sep 20, 2022
19 Sep 20, 2022
Least Square Calibration for Peer Reviews
Least Square Calibration for Peer Reviews Requirements gurobipy - for solving convex programs GPy - for Bayesian baseline numpy pandas To generate p
 1 Nov 1, 2021
1 Nov 1, 2021

A LiDAR point cloud cluster for panoptic segmentation
Divide-and-Merge-LiDAR-Panoptic-Cluster A demo video of our method with semantic prior: More information will be coming soon! As a PhD student, I don'
 65 Dec 22, 2022
65 Dec 22, 2022

Convolutional neural network web app trained to track our infant’s sleep schedule using our Google Nest camera.
Machine Learning Sleep Schedule Tracker What is it? Convolutional neural network web app trained to track our infant’s sleep schedule using our Google
 7 Jul 15, 2022
7 Jul 15, 2022
This will help to read QR codes using Raspberry Pi and Pi Camera
Raspberry-Pi-Generate-and-Read-QR-code This will help to read QR codes using Raspberry Pi and Pi Camera Install the required libraries first in your T
 2 Nov 6, 2021
2 Nov 6, 2021

PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
Unsupervised Depth Completion with Calibrated Backprojection Layers PyTorch implementation of Unsupervised Depth Completion with Calibrated Backprojec
 80 Dec 13, 2022
80 Dec 13, 2022
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
80 Dec 13, 2022

Source code for 2021 ICCV paper "In-the-Wild Single Camera 3D Reconstruction Through Moving Water Surfaces"
In-the-Wild Single Camera 3D Reconstruction Through Moving Water Surfaces This is the PyTorch implementation for 2021 ICCV paper "In-the-Wild Single C
 27 Dec 6, 2022
27 Dec 6, 2022

Trajectory Extraction of road users via Traffic Camera
Traffic Monitoring Citation The associated paper for this project will be published here as soon as possible. When using this software, please cite th
 14 Dec 17, 2022
14 Dec 17, 2022

Project code for weakly supervised 3D object detectors using wide-baseline multi-view traffic camera data: WIBAM.
WIBAM (Work in progress) Weakly Supervised Training of Monocular 3D Object Detectors Using Wide Baseline Multi-view Traffic Camera Data 3D object dete
 10 Aug 24, 2022
10 Aug 24, 2022

Hardware-accelerated ROS2 packages for camera image processing.
Isaac ROS Image Pipeline Overview This metapackage offers similar functionality as the standard, CPU-based image_pipeline metapackage, but does so by
 52 Dec 15, 2022
52 Dec 15, 2022
realsense d400 - jpg + csv
Realsense-capture realsense d400 - jpg + csv Requirements RealSense sdk : Installation Python3 pyrealsense2 (RealSense SDK) Numpy OpenCV Tkinter Run
 2 Mar 22, 2022
2 Mar 22, 2022

PoseViz – Multi-person, multi-camera 3D human pose visualization tool built using Mayavi.
PoseViz – 3D Human Pose Visualizer Multi-person, multi-camera 3D human pose visualization tool built using Mayavi. As used in MeTRAbs visualizations.
 79 Dec 30, 2022
79 Dec 30, 2022

Benchmark tools for Compressive LiDAR-to-map registration
Benchmark tools for Compressive LiDAR-to-map registration This repo contains the released version of code and datasets used for our IROS 2021 paper: "
 9 Nov 24, 2022
9 Nov 24, 2022

collect training and calibration data for gaze tracking
Collect Training and Calibration Data for Gaze Tracking This tool allows collecting gaze data necessary for personal calibration or training of eye-tr
 5 Dec 17, 2022
5 Dec 17, 2022

Instance-based label smoothing for improving deep neural networks generalization and calibration
Instance-based Label Smoothing for Neural Networks Pytorch Implementation of the algorithm. This repository includes a new proposed method for instanc
 1 Aug 13, 2022
1 Aug 13, 2022

Continuous Time LiDAR odometry
CT-ICP: Elastic SLAM for LiDAR sensors This repository implements the SLAM CT-ICP (see our article), a lightweight, precise and versatile pure LiDAR o
 385 Dec 29, 2022
385 Dec 29, 2022
![[ICCV 2021 Oral] Deep Evidential Action Recognition](https://github.com/Cogito2012/DEAR/raw/master/assets/gif/known/Basketball_v_Basketball_g05_c03.gif)
[ICCV 2021 Oral] Deep Evidential Action Recognition
DEAR (Deep Evidential Action Recognition) Project | Paper & Supp Wentao Bao, Qi Yu, Yu Kong International Conference on Computer Vision (ICCV Oral), 2
 80 Jan 3, 2023
80 Jan 3, 2023

Code for ICCV2021 paper SPEC: Seeing People in the Wild with an Estimated Camera
SPEC: Seeing People in the Wild with an Estimated Camera [ICCV 2021] SPEC: Seeing People in the Wild with an Estimated Camera, Muhammed Kocabas, Chun-
 187 Dec 26, 2022
187 Dec 26, 2022

Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR
Official implementation for paper "Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR"
 72 Dec 9, 2022
72 Dec 9, 2022
A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of a custom mass and velocity within the simulation, select what specifically is displayed, and move the camera.
Python-Orbit-Sim A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of
 3 Oct 22, 2021
3 Oct 22, 2021

BabelCalib: A Universal Approach to Calibrating Central Cameras. In ICCV (2021)
BabelCalib: A Universal Approach to Calibrating Central Cameras This repository contains the MATLAB implementation of the BabelCalib calibration frame
 55 Dec 30, 2022
55 Dec 30, 2022

We utilize deep reinforcement learning to obtain favorable trajectories for visual-inertial system calibration.
Unified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning Update: The lastest code will be updated in this branch. Pleas
 27 Dec 29, 2022
27 Dec 29, 2022

Deep Anomaly Detection with Outlier Exposure (ICLR 2019)
Outlier Exposure This repository contains the essential code for the paper Deep Anomaly Detection with Outlier Exposure (ICLR 2019). Requires Python 3
 464 Dec 27, 2022
464 Dec 27, 2022

A blender 2.9x addon for managing camera settings
TMG-Camera-Tools A blender 2.9x addon for managing camera settings Tutorial showcasing current features
 12 Apr 16, 2022
12 Apr 16, 2022

Official PyTorch implementation of "Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image", ICCV 2019
PoseNet of "Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image" Introduction This repo is official Py
 677 Dec 25, 2022
677 Dec 25, 2022
Use ZWO astronomy camera as an IP camera.
ZWO Astronomy Camera as IP Camera Astronomy cameras are known for their high sensitivity and flexibility on whether to have IR pass through and bayer
 9 Oct 15, 2022
9 Oct 15, 2022
A GUI for Face Recognition, based upon Docker, Tkinter, GPU and a camera device.
Face Recognition GUI This repository is a GUI version of Face Recognition by Adam Geitgey, where e.g. Docker and Tkinter are utilized. All the materia
 6 Dec 5, 2022
6 Dec 5, 2022

A python toolbox for predictive uncertainty quantification, calibration, metrics, and visualization
Website, Tutorials, and Docs Uncertainty Toolbox A python toolbox for predictive uncertainty quantification, calibration, metrics, and visualizatio
 1.4k Dec 28, 2022
1.4k Dec 28, 2022
Code and data to accompany the camera-ready version of "Cross-Attention is All You Need: Adapting Pretrained Transformers for Machine Translation" in EMNLP 2021
Code and data to accompany the camera-ready version of "Cross-Attention is All You Need: Adapting Pretrained Transformers for Machine Translation" in EMNLP 2021
 16 Jul 16, 2022
16 Jul 16, 2022

An extremely simple, intuitive, hardware-friendly, and well-performing network structure for LiDAR semantic segmentation on 2D range image. IROS21
FIDNet_SemanticKITTI Motivation Implementing complicated network modules with only one or two points improvement on hardware is tedious. So here we pr
54 Dec 12, 2022

DSAC* for Visual Camera Re-Localization (RGB or RGB-D)
DSAC* for Visual Camera Re-Localization (RGB or RGB-D) Introduction Installation Data Structure Supported Datasets 7Scenes 12Scenes Cambridge Landmark
 143 Dec 22, 2022
143 Dec 22, 2022
A Python 2.7/3.x module for Amcrest Cameras using the SDK HTTP API.
A Python 2.7/3.x module for Amcrest Cameras using the SDK HTTP API. Amcrest and Dahua devices share similar firmwares. Dahua Cameras and NVRs also work with this module.
 176 Dec 21, 2022
176 Dec 21, 2022
The First Python Compatible Camera Hacking Tool
ZCam Hack webcam using python by sending malicious link. FEATURES : [+] Real-time Camera hacking [+] Python compatible [+] URL Shortener using bitly [
 109 Dec 28, 2022
109 Dec 28, 2022
We protect the privacy of the data on your computer by using the camera of your Debian based Pardus operating system. 🕵️
Pardus Lookout We protect the privacy of the data on your computer by using the camera of your Debian based Pardus operating system. The application i
 19 Nov 18, 2022
19 Nov 18, 2022

Implementation for our ICCV 2021 paper: Dual-Camera Super-Resolution with Aligned Attention Modules
DCSR: Dual Camera Super-Resolution Implementation for our ICCV 2021 oral paper: Dual-Camera Super-Resolution with Aligned Attention Modules paper | pr
 110 Dec 20, 2022
110 Dec 20, 2022
CTRL-C: Camera calibration TRansformer with Line-Classification
CTRL-C: Camera calibration TRansformer with Line-Classification This repository contains the official code and pretrained models for CTRL-C (Camera ca
57 Nov 14, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
101 Dec 5, 2022

Implementation for our ICCV 2021 paper: Dual-Camera Super-Resolution with Aligned Attention Modules
DCSR: Dual Camera Super-Resolution Implementation for our ICCV 2021 oral paper: Dual-Camera Super-Resolution with Aligned Attention Modules paper | pr
110 Dec 20, 2022

Fuse radar and camera for detection
SAF-FCOS: Spatial Attention Fusion for Obstacle Detection using MmWave Radar and Vision Sensor This project hosts the code for implementing the SAF-FC
 18 Jan 1, 2023
18 Jan 1, 2023
![[ICCV21] Self-Calibrating Neural Radiance Fields](https://github.com/POSTECH-CVLab/SCNeRF/raw/master/assets/scnerf_teaser.png)
[ICCV21] Self-Calibrating Neural Radiance Fields
Self-Calibrating Neural Radiance Fields, ICCV, 2021 Project Page | Paper | Video Author Information Yoonwoo Jeong [Google Scholar] Seokjun Ahn [Google
 381 Dec 30, 2022
381 Dec 30, 2022
the code for paper "Energy-Based Open-World Uncertainty Modeling for Confidence Calibration"
EOW-Softmax This code is for the paper "Energy-Based Open-World Uncertainty Modeling for Confidence Calibration". Accepted by ICCV21. Usage Commnd exa
 36 Dec 2, 2022
36 Dec 2, 2022
Camera track the tip of a pen to use as a drawing tablet
cablet Camera track the tip of a pen to use as a drawing tablet Setup You will need: Writing utensil with a colored tip (preferably blue or green) Bac
 14 Feb 20, 2022
14 Feb 20, 2022
A curated list of resources for Image and Video Deblurring
A curated list of resources for Image and Video Deblurring
 1.7k Jan 1, 2023
1.7k Jan 1, 2023

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

3D position tracking for soccer players with multi-camera videos
This repo contains a full pipeline to support 3D position tracking of soccer players, with multi-view calibrated moving/fixed video sequences as inputs.
 72 Dec 27, 2022
72 Dec 27, 2022

Automatic Calibration for Non-repetitive Scanning Solid-State LiDAR and Camera Systems
ACSC Automatic extrinsic calibration for non-repetitive scanning solid-state LiDAR and camera systems. System Architecture 1. Dependency Tested with U
 192 Dec 13, 2022
192 Dec 13, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
78 Dec 27, 2022

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022

Exploit Camera Raw Data for Video Super-Resolution via Hidden Markov Model Inference
RawVSR This repo contains the official codes for our paper: Exploit Camera Raw Data for Video Super-Resolution via Hidden Markov Model Inference Xiaoh
 23 Oct 8, 2022
23 Oct 8, 2022
A Planar RGB-D SLAM which utilizes Manhattan World structure to provide optimal camera pose trajectory while also providing a sparse reconstruction containing points, lines and planes, and a dense surfel-based reconstruction.
ManhattanSLAM Authors: Raza Yunus, Yanyan Li and Federico Tombari ManhattanSLAM is a real-time SLAM library for RGB-D cameras that computes the camera
 117 Dec 28, 2022
117 Dec 28, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022
LiDAR R-CNN: An Efficient and Universal 3D Object Detector
LiDAR R-CNN: An Efficient and Universal 3D Object Detector Introduction This is the official code of LiDAR R-CNN: An Efficient and Universal 3D Object
 295 Jan 5, 2023
295 Jan 5, 2023

S2-BNN: Bridging the Gap Between Self-Supervised Real and 1-bit Neural Networks via Guided Distribution Calibration (CVPR 2021)
S2-BNN (Self-supervised Binary Neural Networks Using Distillation Loss) This is the official pytorch implementation of our paper: "S2-BNN: Bridging th
 52 Dec 24, 2022
52 Dec 24, 2022

Gesture-controlled Video Game. Just swing your finger and play the game without touching your PC
Gesture Controlled Video Game Detailed Blog : https://www.analyticsvidhya.com/blog/2021/06/gesture-controlled-video-game/ Introduction This project is
 35 Jan 6, 2023
35 Jan 6, 2023

Real-time multi-object tracker using YOLO v5 and deep sort
This repository contains a two-stage-tracker. The detections generated by YOLOv5, a family of object detection architectures and models pretrained on the COCO dataset, are passed to a Deep Sort algorithm which tracks the objects. It can track any object that your Yolov5 model was trained to detect.
 3.6k Jan 5, 2023
3.6k Jan 5, 2023
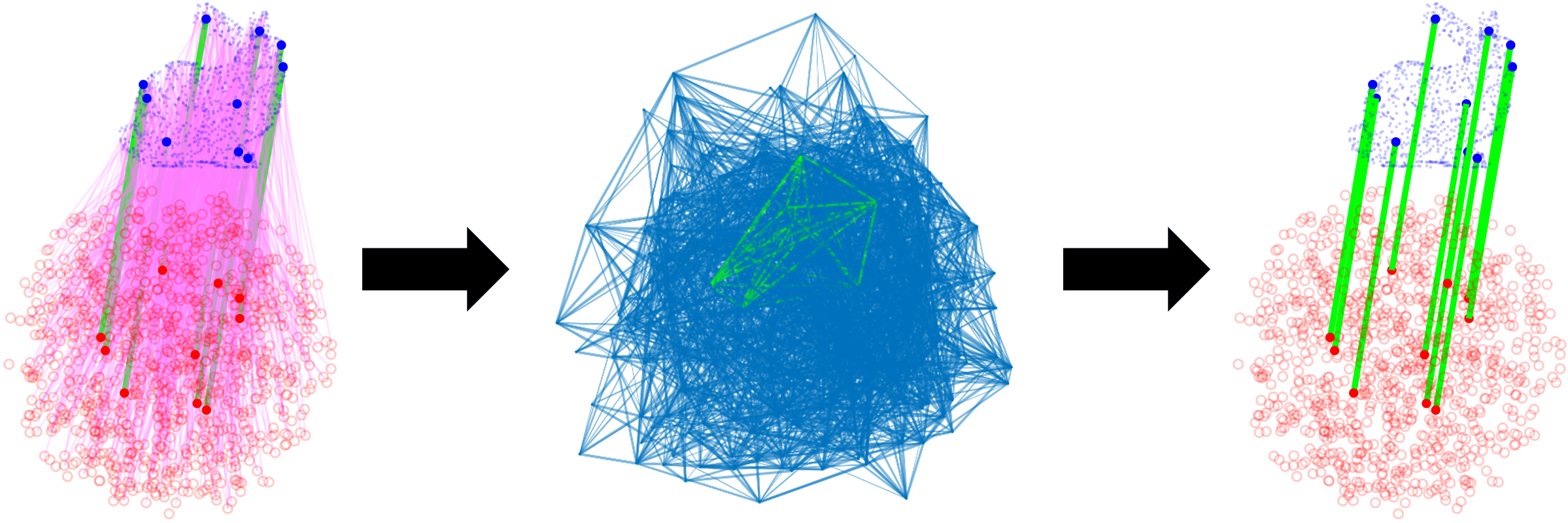
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022
Make a surveillance camera from your raspberry pi!
rpi-surveillance Make a surveillance camera from your Raspberry Pi 4! The surveillance is built as following: the camera records 10 seconds video and
 62 Feb 3, 2022
62 Feb 3, 2022

Dahua Camera and Doorbell Home Assistant Integration
Home Assistant Dahua Integration The Dahua Home Assistant integration allows you to integrate your Dahua cameras and doorbells in Home Assistant. It's
 216 Dec 26, 2022
216 Dec 26, 2022

DLL: Direct Lidar Localization
DLL: Direct Lidar Localization Summary This package presents DLL, a direct map-based localization technique using 3D LIDAR for its application to aeri
 127 Dec 16, 2022
127 Dec 16, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

OpenCVを用いたカメラキャリブレーションのサンプルです。2021/06/21時点でPython実装のある3種類(通常カメラ向け、魚眼レンズ向け(fisheyeモジュール)、全方位カメラ向け(omnidirモジュール))について用意しています。
OpenCV-CameraCalibration-Example FishEyeCameraCalibration.mp4 OpenCVを用いたカメラキャリブレーションのサンプルです 2021/06/21時点でPython実装のある以下3種類について用意しています。 通常カメラ向け 魚眼レンズ向け(
 34 Nov 17, 2022
34 Nov 17, 2022
Pytorch Implementation of Spiking Neural Networks Calibration, ICML 2021
SNN_Calibration Pytorch Implementation of Spiking Neural Networks Calibration, ICML 2021 Feature Comparison of SNN calibration: Features SNN Direct Tr
 60 Dec 27, 2022
60 Dec 27, 2022

Outlier Exposure with Confidence Control for Out-of-Distribution Detection
OOD-detection-using-OECC This repository contains the essential code for the paper Outlier Exposure with Confidence Control for Out-of-Distribution De
 64 Nov 2, 2022
64 Nov 2, 2022
Developed an AI-based system to control the mouse cursor using Python and OpenCV with the real-time camera.
Developed an AI-based system to control the mouse cursor using Python and OpenCV with the real-time camera. Fingertip location is mapped to RGB images to control the mouse cursor.
 71 Dec 20, 2022
71 Dec 20, 2022
CamOver is a camera exploitation tool that allows to disclosure network camera admin password.
CamOver is a camera exploitation tool that allows to disclosure network camera admin password. Features Exploits vulnerabilities in most popul
 247 Jan 2, 2023
247 Jan 2, 2023
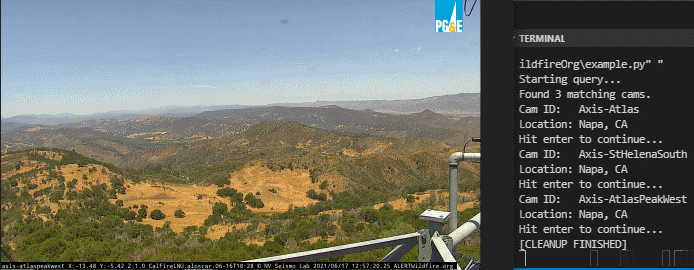
A collection of modules I have created to programmatically search for/download imagery from live cam feeds across the state of California.
A collection of modules that I have created to programmatically search for/download imagery from all publicly available live cam feeds across the state of California. In no way am I affiliated with any of these organizations and these modules/methods of gathering imagery are completely unofficial.
 5 Nov 21, 2022
5 Nov 21, 2022

Visualize Camera's Pose Using Extrinsic Parameter by Plotting Pyramid Model on 3D Space
extrinsic2pyramid Visualize Camera's Pose Using Extrinsic Parameter by Plotting Pyramid Model on 3D Space Intro A very simple and straightforward modu
 106 Dec 28, 2022
106 Dec 28, 2022
Home Assistant custom integration for Yi cameras: yi-hack-MStar, yi-hack-Allwinner and yi-hack-Allwinner-v2
yi-hack Home Assistant integration Overview yi-hack Home Assistant is a custom integration for Yi cameras (or Sonoff camera) with one of the following
 131 Jan 3, 2023
131 Jan 3, 2023

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera
 494 Jan 6, 2023
494 Jan 6, 2023

T-LOAM: Truncated Least Squares Lidar-only Odometry and Mapping in Real-Time
T-LOAM: Truncated Least Squares Lidar-only Odometry and Mapping in Real-Time The first Lidar-only odometry framework with high performance based on tr
 183 Dec 1, 2022
183 Dec 1, 2022
CamRaptor is a tool that exploits several vulnerabilities in popular DVR cameras to obtain device credentials.
CamRaptor is a tool that exploits several vulnerabilities in popular DVR cameras to obtain device credentials.
118 Dec 24, 2022
Camera calibration & 3D pose estimation tools for AcinoSet
AcinoSet: A 3D Pose Estimation Dataset and Baseline Models for Cheetahs in the Wild Daniel Joska, Liam Clark, Naoya Muramatsu, Ricardo Jericevich, Fre
 42 Nov 16, 2022
42 Nov 16, 2022