175 Repositories
Python decision-fusion Libraries
Code for "Finding Regions of Heterogeneity in Decision-Making via Expected Conditional Covariance" at NeurIPS 2021
Finding Regions of Heterogeneity in Decision-Making via Expected Conditional Covariance Justin Lim, Christina X Ji, Michael Oberst, Saul Blecker, Leor
 3 Feb 3, 2022
3 Feb 3, 2022
PyTorch and GPyTorch implementation of the paper "Conditioning Sparse Variational Gaussian Processes for Online Decision-making."
Conditioning Sparse Variational Gaussian Processes for Online Decision-making This repository contains a PyTorch and GPyTorch implementation of the pa
 16 Dec 8, 2022
16 Dec 8, 2022
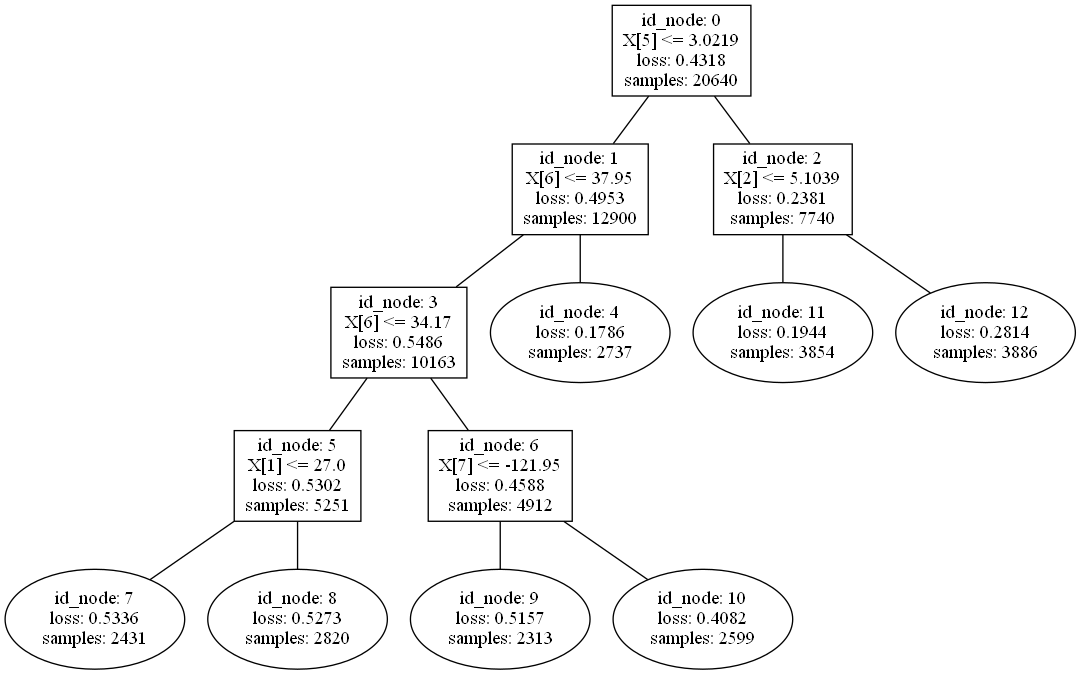
A simple python implementation of Decision Tree.
DecisionTree A simple python implementation of Decision Tree, using Gini index. Usage: import DecisionTree node = DecisionTree.trainDecisionTree(lab
 1 Nov 12, 2021
1 Nov 12, 2021

Dynamica causal Bayesian optimisation
Dynamic Causal Bayesian Optimization This is a Python implementation of Dynamic Causal Bayesian Optimization as presented at NeurIPS 2021. Abstract Th
 18 Nov 22, 2022
18 Nov 22, 2022

MVFNet: Multi-View Fusion Network for Efficient Video Recognition (AAAI 2021)
MVFNet: Multi-View Fusion Network for Efficient Video Recognition (AAAI 2021) Overview We release the code of the MVFNet (Multi-View Fusion Network).
 2 Jan 29, 2022
2 Jan 29, 2022

PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
Unsupervised Depth Completion with Calibrated Backprojection Layers PyTorch implementation of Unsupervised Depth Completion with Calibrated Backprojec
 80 Dec 13, 2022
80 Dec 13, 2022
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
80 Dec 13, 2022

This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021
DIFFNet This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021 A new backbone for self-supervised d
 3 Oct 22, 2021
3 Oct 22, 2021
Self-Supervised Monocular DepthEstimation with Internal Feature Fusion(arXiv), BMVC2021
DIFFNet This repo is for Self-Supervised Monocular DepthEstimation with Internal Feature Fusion(arXiv), BMVC2021 A new backbone for self-supervised de
94 Dec 25, 2022

Real-time Neural Representation Fusion for Robust Volumetric Mapping
NeuralBlox: Real-Time Neural Representation Fusion for Robust Volumetric Mapping Paper | Supplementary This repository contains the implementation of
 106 Dec 24, 2022
106 Dec 24, 2022
Unofficial PyTorch Implementation of "DOLG: Single-Stage Image Retrieval with Deep Orthogonal Fusion of Local and Global Features"
Pytorch Implementation of Deep Orthogonal Fusion of Local and Global Features (DOLG) This is the unofficial PyTorch Implementation of "DOLG: Single-St
 96 Jan 6, 2023
96 Jan 6, 2023
PyPI package for scaffolding out code for decision tree models that can learn to find relationships between the attributes of an object.
Decision Tree Writer This package allows you to train a binary classification decision tree on a list of labeled dictionaries or class instances, and
 2 Apr 23, 2022
2 Apr 23, 2022
Multi-Scale Progressive Fusion Network for Single Image Deraining
Multi-Scale Progressive Fusion Network for Single Image Deraining (MSPFN) This is an implementation of the MSPFN model proposed in the paper (Multi-Sc
 128 Nov 21, 2022
128 Nov 21, 2022
An addin for Autodesk Fusion 360 that lets you view your design in a Looking Glass Portrait 3D display
An addin for Autodesk Fusion 360 that lets you view your design in a Looking Glass Portrait 3D display
 12 Nov 2, 2022
12 Nov 2, 2022

Azua - build AI algorithms to aid efficient decision-making with minimum data requirements.
Project Azua 0. Overview Many modern AI algorithms are known to be data-hungry, whereas human decision-making is much more efficient. The human can re
 197 Jan 6, 2023
197 Jan 6, 2023

CCAFNet: Crossflow and Cross-scale Adaptive Fusion Network for Detecting Salient Objects in RGB-D Images
Code and result about CCAFNet(IEEE TMM) 'CCAFNet: Crossflow and Cross-scale Adaptive Fusion Network for Detecting Salient Objects in RGB-D Images' IEE
 14 Dec 29, 2021
14 Dec 29, 2021

pytorch implementation of "Distilling a Neural Network Into a Soft Decision Tree"
Soft-Decision-Tree Soft-Decision-Tree is the pytorch implementation of Distilling a Neural Network Into a Soft Decision Tree, paper recently published
 262 Dec 4, 2022
262 Dec 4, 2022
Making decision trees competitive with neural networks on CIFAR10, CIFAR100, TinyImagenet200, Imagenet
Neural-Backed Decision Trees · Site · Paper · Blog · Video Alvin Wan, *Lisa Dunlap, *Daniel Ho, Jihan Yin, Scott Lee, Henry Jin, Suzanne Petryk, Sarah
 556 Dec 20, 2022
556 Dec 20, 2022

This python-based package offers a way of creating a parametric OpenMC plasma source from plasma parameters.
openmc-plasma-source This python-based package offers a way of creating a parametric OpenMC plasma source from plasma parameters. The OpenMC sources a
 10 Oct 18, 2022
10 Oct 18, 2022

决策树分类与回归模型的实现和可视化
DecisionTree 决策树分类与回归模型,以及可视化 DecisionTree ID3 C4.5 CART 分类 回归 决策树绘制 分类树 回归树 调参 剪枝 ID3 ID3决策树是最朴素的决策树分类器: 无剪枝 只支持离散属性 采用信息增益准则 在data.py中,我们记录了一个小的西瓜数据
 10 Oct 22, 2022
10 Oct 22, 2022

Decentralized Reinforcment Learning: Global Decision-Making via Local Economic Transactions (ICML 2020)
Decentralized Reinforcement Learning This is the code complementing the paper Decentralized Reinforcment Learning: Global Decision-Making via Local Ec
 40 Oct 30, 2022
40 Oct 30, 2022

This repository contains the official implementation code of the paper Improving Multimodal Fusion with Hierarchical Mutual Information Maximization for Multimodal Sentiment Analysis, accepted at EMNLP 2021.
MultiModal-InfoMax This repository contains the official implementation code of the paper Improving Multimodal Fusion with Hierarchical Mutual Informa
 89 Dec 26, 2022
89 Dec 26, 2022
This repository contains various models targetting multimodal representation learning, multimodal fusion for downstream tasks such as multimodal sentiment analysis.
Multimodal Deep Learning 🎆 🎆 🎆 Announcing the multimodal deep learning repository that contains implementation of various deep learning-based model
398 Dec 30, 2022

LLVIP: A Visible-infrared Paired Dataset for Low-light Vision
LLVIP: A Visible-infrared Paired Dataset for Low-light Vision Project | Arxiv | Abstract It is very challenging for various visual tasks such as image
 377 Jan 7, 2023
377 Jan 7, 2023

HDR Video Reconstruction: A Coarse-to-fine Network and A Real-world Benchmark Dataset (ICCV 2021)
Code for HDR Video Reconstruction HDR Video Reconstruction: A Coarse-to-fine Network and A Real-world Benchmark Dataset (ICCV 2021) Guanying Chen, Cha
 64 Nov 19, 2022
64 Nov 19, 2022
Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation
UniFuse (RAL+ICRA2021) Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation, arXiv, Demo Preparation I
 47 Dec 26, 2022
47 Dec 26, 2022

We propose a new method for effective shadow removal by regarding it as an exposure fusion problem.
Auto-exposure fusion for single-image shadow removal We propose a new method for effective shadow removal by regarding it as an exposure fusion proble
 146 Dec 31, 2022
146 Dec 31, 2022
Deep RGB-D Saliency Detection with Depth-Sensitive Attention and Automatic Multi-Modal Fusion (CVPR'2021, Oral)
DSA^2 F: Deep RGB-D Saliency Detection with Depth-Sensitive Attention and Automatic Multi-Modal Fusion (CVPR'2021, Oral) This repo is the official imp
 46 Dec 21, 2022
46 Dec 21, 2022
![[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion](https://github.com/rulixiang/CorrFusionNet/raw/master/figures/corrfusion.png)
[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion
Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion Code for Multi-Temporal Scene Classification and Scene Ch
 33 Dec 12, 2022
33 Dec 12, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
 90 Dec 29, 2022
90 Dec 29, 2022
A python library to build Model Trees with Linear Models at the leaves.
A python library to build Model Trees with Linear Models at the leaves.
 212 Dec 30, 2022
212 Dec 30, 2022

VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation
VID-Fusion VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation Authors: Ziming Ding , Tiankai Yang, Kunyi Zhan
 86 Nov 18, 2022
86 Nov 18, 2022

30 Days Of Machine Learning Using Pytorch
Objective of the repository is to learn and build machine learning models using Pytorch. 30DaysofML Using Pytorch
 119 Nov 24, 2022
119 Nov 24, 2022

Code for the CVPR2021 paper "Patch-NetVLAD: Multi-Scale Fusion of Locally-Global Descriptors for Place Recognition"
Patch-NetVLAD: Multi-Scale Fusion of Locally-Global Descriptors for Place Recognition This repository contains code for the CVPR2021 paper "Patch-NetV
 368 Jan 6, 2023
368 Jan 6, 2023

Thermal Control of Laser Powder Bed Fusion using Deep Reinforcement Learning
This repository is the implementation of the paper "Thermal Control of Laser Powder Bed Fusion Using Deep Reinforcement Learning", linked here. The project makes use of the Deep Reinforcement Library stable-baselines3 to derive a control policy that maximizes melt pool depth consistency.
 11 Dec 27, 2022
11 Dec 27, 2022

Official code for "EagerMOT: 3D Multi-Object Tracking via Sensor Fusion" [ICRA 2021]
EagerMOT: 3D Multi-Object Tracking via Sensor Fusion Read our ICRA 2021 paper here. Check out the 3 minute video for the quick intro or the full prese
 276 Dec 30, 2022
276 Dec 30, 2022
![[CVPR'21] DeepSurfels: Learning Online Appearance Fusion](https://github.com/onlinereconstruction/deep_surfels/raw/main/media/ds_pipeline.png)
[CVPR'21] DeepSurfels: Learning Online Appearance Fusion
DeepSurfels: Learning Online Appearance Fusion Paper | Video | Project Page This is the official implementation of the CVPR 2021 submission DeepSurfel
 52 Nov 14, 2022
52 Nov 14, 2022

Fusion-DHL: WiFi, IMU, and Floorplan Fusion for Dense History of Locations in Indoor Environments
Fusion-DHL: WiFi, IMU, and Floorplan Fusion for Dense History of Locations in Indoor Environments Paper: arXiv (ICRA 2021) Video : https://youtu.be/CC
 68 Jan 3, 2023
68 Jan 3, 2023

Disagreement-Regularized Imitation Learning
Due to a normalization bug the expert trajectories have lower performance than the rl_baseline_zoo reported experts. Please see the following link in
 25 Apr 28, 2022
25 Apr 28, 2022

Official codebase for Decision Transformer: Reinforcement Learning via Sequence Modeling.
Decision Transformer Lili Chen*, Kevin Lu*, Aravind Rajeswaran, Kimin Lee, Aditya Grover, Michael Laskin, Pieter Abbeel, Aravind Srinivas†, and Igor M
 1.4k Jan 7, 2023
1.4k Jan 7, 2023

YBlade - Import QBlade blades into Fusion 360
YBlade - Import QBlade blades into Fusion 360 Simple script for Fusion 360 that takes QBlade blade description and constructs the blade: Usage First,
 37 Sep 25, 2022
37 Sep 25, 2022
Code of U2Fusion: a unified unsupervised image fusion network for multiple image fusion tasks, including multi-modal, multi-exposure and multi-focus image fusion.
U2Fusion Code of U2Fusion: a unified unsupervised image fusion network for multiple image fusion tasks, including multi-modal (VIS-IR, medical), multi
 129 Dec 11, 2022
129 Dec 11, 2022
TensorFlow Decision Forests (TF-DF) is a collection of state-of-the-art algorithms for the training, serving and interpretation of Decision Forest models.
TensorFlow Decision Forests (TF-DF) is a collection of state-of-the-art algorithms for the training, serving and interpretation of Decision Forest models. The library is a collection of Keras models and supports classification, regression and ranking. TF-DF is a TensorFlow wrapper around the Yggdrasil Decision Forests C++ libraries. Models trained with TF-DF are compatible with Yggdrasil Decision Forests' models, and vice versa.
 538 Jan 1, 2023
538 Jan 1, 2023

Improving Deep Network Debuggability via Sparse Decision Layers
Improving Deep Network Debuggability via Sparse Decision Layers This repository contains the code for our paper: Leveraging Sparse Linear Layers for D
 35 Nov 14, 2022
35 Nov 14, 2022

Official implement of Paper:A deeply supervised image fusion network for change detection in high resolution bi-temporal remote sening images
A deeply supervised image fusion network for change detection in high resolution bi-temporal remote sensing images 深度监督影像融合网络DSIFN用于高分辨率双时相遥感影像变化检测 Of
 135 Dec 19, 2022
135 Dec 19, 2022
Objective of the repository is to learn and build machine learning models using Pytorch. 30DaysofML Using Pytorch
30 Days Of Machine Learning Using Pytorch Objective of the repository is to learn and build machine learning models using Pytorch. List of Algorithms
119 Nov 24, 2022
![[CVPR'21] Multi-Modal Fusion Transformer for End-to-End Autonomous Driving](https://github.com/autonomousvision/transfuser/raw/main/transfuser/assets/teaser.png)
[CVPR'21] Multi-Modal Fusion Transformer for End-to-End Autonomous Driving
TransFuser This repository contains the code for the CVPR 2021 paper Multi-Modal Fusion Transformer for End-to-End Autonomous Driving. If you find our
 695 Jan 5, 2023
695 Jan 5, 2023
This is the official implementation of 3D-CVF: Generating Joint Camera and LiDAR Features Using Cross-View Spatial Feature Fusion for 3D Object Detection, built on SECOND.
3D-CVF This is the official implementation of 3D-CVF: Generating Joint Camera and LiDAR Features Using Cross-View Spatial Feature Fusion for 3D Object
 97 Dec 20, 2022
97 Dec 20, 2022

Neural Oblivious Decision Ensembles
Neural Oblivious Decision Ensembles A supplementary code for anonymous ICLR 2020 submission. What does it do? It learns deep ensembles of oblivious di
 25 Sep 21, 2022
25 Sep 21, 2022

Algorithmic trading using machine learning.
Algorithmic Trading This machine learning algorithm was built using Python 3 and scikit-learn with a Decision Tree Classifier. The program gathers sto
 101 Nov 10, 2022
101 Nov 10, 2022
![[AAAI 2021] MVFNet: Multi-View Fusion Network for Efficient Video Recognition](https://github.com/whwu95/MVFNet/raw/main/mvfnet.png)
[AAAI 2021] MVFNet: Multi-View Fusion Network for Efficient Video Recognition
MVFNet: Multi-View Fusion Network for Efficient Video Recognition (AAAI 2021) Overview We release the code of the MVFNet (Multi-View Fusion Network).
 114 Nov 27, 2022
114 Nov 27, 2022

An introduction of Markov decision process (MDP) and two algorithms that solve MDPs (value iteration, policy iteration) along with their Python implementations.
Markov Decision Process A Markov decision process (MDP), by definition, is a sequential decision problem for a fully observable, stochastic environmen
 31 Dec 30, 2022
31 Dec 30, 2022
Hybrid Neural Fusion for Full-frame Video Stabilization
FuSta: Hybrid Neural Fusion for Full-frame Video Stabilization Project Page | Video | Paper | Google Colab Setup Setup environment for [Yu and Ramamoo
 430 Jan 4, 2023
430 Jan 4, 2023

Automated Machine Learning Pipeline with Feature Engineering and Hyper-Parameters Tuning
The mljar-supervised is an Automated Machine Learning Python package that works with tabular data. I
 2.4k Jan 2, 2023
2.4k Jan 2, 2023
Understanding and Improving Encoder Layer Fusion in Sequence-to-Sequence Learning (ICLR 2021)
Understanding and Improving Encoder Layer Fusion in Sequence-to-Sequence Learning (ICLR 2021) Citation Please cite as: @inproceedings{liu2020understan
 22 Nov 25, 2022
22 Nov 25, 2022
![[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.](https://github.com/ethnhe/FFB6D/raw/master/figs/FFB6D_overview.png)
[CVPR2021 Oral] FFB6D: A Full Flow Bidirectional Fusion Network for 6D Pose Estimation.
FFB6D This is the official source code for the CVPR2021 Oral work, FFB6D: A Full Flow Biderectional Fusion Network for 6D Pose Estimation. (Arxiv) Tab
 201 Dec 28, 2022
201 Dec 28, 2022
[CVPR 2021] Modular Interactive Video Object Segmentation: Interaction-to-Mask, Propagation and Difference-Aware Fusion
[CVPR 2021] Modular Interactive Video Object Segmentation: Interaction-to-Mask, Propagation and Difference-Aware Fusion
 364 Jan 3, 2023
364 Jan 3, 2023
treeinterpreter - Interpreting scikit-learn's decision tree and random forest predictions.
TreeInterpreter Package for interpreting scikit-learn's decision tree and random forest predictions. Allows decomposing each prediction into bias and
 720 Dec 22, 2022
720 Dec 22, 2022
A fast, scalable, high performance Gradient Boosting on Decision Trees library, used for ranking, classification, regression and other machine learning tasks for Python, R, Java, C++. Supports computation on CPU and GPU.
Website | Documentation | Tutorials | Installation | Release Notes CatBoost is a machine learning method based on gradient boosting over decision tree
 6.9k Jan 5, 2023
6.9k Jan 5, 2023
A fast, distributed, high performance gradient boosting (GBT, GBDT, GBRT, GBM or MART) framework based on decision tree algorithms, used for ranking, classification and many other machine learning tasks.
Light Gradient Boosting Machine LightGBM is a gradient boosting framework that uses tree based learning algorithms. It is designed to be distributed a
14.5k Jan 7, 2023
Home repository for the Regularized Greedy Forest (RGF) library. It includes original implementation from the paper and multithreaded one written in C++, along with various language-specific wrappers.
Regularized Greedy Forest Regularized Greedy Forest (RGF) is a tree ensemble machine learning method described in this paper. RGF can deliver better r
 363 Dec 14, 2022
363 Dec 14, 2022
Highly interpretable classifiers for scikit learn, producing easily understood decision rules instead of black box models
Highly interpretable, sklearn-compatible classifier based on decision rules This is a scikit-learn compatible wrapper for the Bayesian Rule List class
 482 Nov 19, 2022
482 Nov 19, 2022
🍊 :bar_chart: :bulb: Orange: Interactive data analysis
Orange Data Mining Orange is a data mining and visualization toolbox for novice and expert alike. To explore data with Orange, one requires no program
 3.9k Jan 5, 2023
3.9k Jan 5, 2023
MazeRL is an application oriented Deep Reinforcement Learning (RL) framework
MazeRL is an application oriented Deep Reinforcement Learning (RL) framework, addressing real-world decision problems. Our vision is to cover the complete development life cycle of RL applications ranging from simulation engineering up to agent development, training and deployment.
 222 Dec 24, 2022
222 Dec 24, 2022
CLOCs: Camera-LiDAR Object Candidates Fusion for 3D Object Detection
CLOCs is a novel Camera-LiDAR Object Candidates fusion network. It provides a low-complexity multi-modal fusion framework that improves the performance of single-modality detectors. CLOCs operates on the combined output candidates of any 3D and any 2D detector, and is trained to produce more accurate 3D and 2D detection results.
 254 Dec 16, 2022
254 Dec 16, 2022

Python implementation of Wu et al (2018)'s registration fusion
reg-fusion Projection of a central sulcus probability map using the RF-ANTs approach (right hemisphere shown). This is a Python implementation of Wu e
 26 Nov 12, 2021
26 Nov 12, 2021
A fast, scalable, high performance Gradient Boosting on Decision Trees library, used for ranking, classification, regression and other machine learning tasks for Python, R, Java, C++. Supports computation on CPU and GPU.
Website | Documentation | Tutorials | Installation | Release Notes CatBoost is a machine learning method based on gradient boosting over decision tree
5.7k Feb 12, 2021
A fast, distributed, high performance gradient boosting (GBT, GBDT, GBRT, GBM or MART) framework based on decision tree algorithms, used for ranking, classification and many other machine learning tasks.
Light Gradient Boosting Machine LightGBM is a gradient boosting framework that uses tree based learning algorithms. It is designed to be distributed a
14.5k Jan 8, 2023

PyTorch implementation of "A Full-Band and Sub-Band Fusion Model for Real-Time Single-Channel Speech Enhancement."
FullSubNet This Git repository for the official PyTorch implementation of "A Full-Band and Sub-Band Fusion Model for Real-Time Single-Channel Speech E
 357 Jan 4, 2023
357 Jan 4, 2023
A fast, distributed, high performance gradient boosting (GBT, GBDT, GBRT, GBM or MART) framework based on decision tree algorithms, used for ranking, classification and many other machine learning tasks.
Light Gradient Boosting Machine LightGBM is a gradient boosting framework that uses tree based learning algorithms. It is designed to be distributed a
14.5k Jan 8, 2023

Automates Machine Learning Pipeline with Feature Engineering and Hyper-Parameters Tuning :rocket:
MLJAR Automated Machine Learning Documentation: https://supervised.mljar.com/ Source Code: https://github.com/mljar/mljar-supervised Table of Contents
2.4k Dec 31, 2022
A fast, scalable, high performance Gradient Boosting on Decision Trees library, used for ranking, classification, regression and other machine learning tasks for Python, R, Java, C++. Supports computation on CPU and GPU.
Website | Documentation | Tutorials | Installation | Release Notes CatBoost is a machine learning method based on gradient boosting over decision tree
6.9k Jan 4, 2023
Simple machine learning library / 簡單易用的機器學習套件
FukuML Simple machine learning library / 簡單易用的機器學習套件 Installation $ pip install FukuML Tutorial Lesson 1: Perceptron Binary Classification Learning Al
 279 Sep 15, 2022
279 Sep 15, 2022
Home repository for the Regularized Greedy Forest (RGF) library. It includes original implementation from the paper and multithreaded one written in C++, along with various language-specific wrappers.
Regularized Greedy Forest Regularized Greedy Forest (RGF) is a tree ensemble machine learning method described in this paper. RGF can deliver better r
364 Dec 28, 2022