167 Repositories
Python gym-robotics Libraries
Reinforcement Learning with Q-Learning Algorithm on gym's frozen lake environment implemented in python
Reinforcement Learning with Q Learning Algorithm Q learning algorithm is trained on the gym's frozen lake environment. Libraries Used gym Numpy tqdm P
 1 Nov 10, 2021
1 Nov 10, 2021

Motion planning environment for Sampling-based Planners
Sampling-Based Motion Planners' Testing Environment Sampling-based motion planners' testing environment (sbp-env) is a full feature framework to quick
 23 Aug 23, 2022
23 Aug 23, 2022
Multi-Joint dynamics with Contact. A general purpose physics simulator.
MuJoCo Physics MuJoCo stands for Multi-Joint dynamics with Contact. It is a general purpose physics engine that aims to facilitate research and develo
 5.2k Jan 2, 2023
5.2k Jan 2, 2023

An OpenAI Gym environment for multi-agent car racing based on Gym's original car racing environment.
Multi-Car Racing Gym Environment This repository contains MultiCarRacing-v0 a multiplayer variant of Gym's original CarRacing-v0 environment. This env
 56 Nov 1, 2022
56 Nov 1, 2022

The project is an open-source and low-cost kit to get started with underactuated robotics.
Torque Limited Simple Pendulum Introduction The project is an open-source and low-cost kit to get started with underactuated robotics. The kit targets
 34 Dec 14, 2022
34 Dec 14, 2022

Minimalistic Gridworld Environment (MiniGrid)
Minimalistic Gridworld Environment (MiniGrid) There are other gridworld Gym environments out there, but this one is designed to be particularly simple
 1.7k Jan 3, 2023
1.7k Jan 3, 2023
Repo for EchoVPR: Echo State Networks for Visual Place Recognition
EchoVPR Repo for EchoVPR: Echo State Networks for Visual Place Recognition Currently under development Dirs: data: pre-collected hidden representation
 4 Oct 4, 2022
4 Oct 4, 2022

Vision-and-Language Navigation in Continuous Environments using Habitat
Vision-and-Language Navigation in Continuous Environments (VLN-CE) Project Website — VLN-CE Challenge — RxR-Habitat Challenge Official implementations
 132 Jan 2, 2023
132 Jan 2, 2023
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
🎓Automatically Update CV Papers Daily using Github Actions (Update at 12:00 UTC Every Day)
 270 Jan 7, 2023
270 Jan 7, 2023

We utilize deep reinforcement learning to obtain favorable trajectories for visual-inertial system calibration.
Unified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning Update: The lastest code will be updated in this branch. Pleas
 27 Dec 29, 2022
27 Dec 29, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023

linorobot2 is a ROS2 port of the linorobot package
linorobot2 is a ROS2 port of the linorobot package. If you're planning to build your own custom ROS2 robot (2WD, 4WD, Mecanum Drive) using accessible parts, then this package is for you. This repository contains launch files to easily integrate your DIY robot with Nav2 and a simulation pipeline to run and verify your experiments on a virtual robot in Gazebo.
 195 Dec 29, 2022
195 Dec 29, 2022

CLIPort: What and Where Pathways for Robotic Manipulation
CLIPort CLIPort: What and Where Pathways for Robotic Manipulation Mohit Shridhar, Lucas Manuelli, Dieter Fox CoRL 2021 CLIPort is an end-to-end imitat
 246 Dec 11, 2022
246 Dec 11, 2022
Open source guides/codes for mastering deep learning to deploying deep learning in production in PyTorch, Python, C++ and more.
Deep Learning Materials by Deep Learning Wizard Start Learning Now Please head to www.deeplearningwizard.com to start learning! It is mobile/tablet fr
 572 Dec 28, 2022
572 Dec 28, 2022
PowerGym is a Gym-like environment for Volt-Var control in power distribution systems.
Overview PowerGym is a Gym-like environment for Volt-Var control in power distribution systems. The Volt-Var control targets minimizing voltage violat
 44 Jan 1, 2023
44 Jan 1, 2023
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022

A general-purpose, flexible, and easy-to-use simulator alongside an OpenAI Gym trading environment for MetaTrader 5 trading platform (Approved by OpenAI Gym)
gym-mtsim: OpenAI Gym - MetaTrader 5 Simulator MtSim is a simulator for the MetaTrader 5 trading platform alongside an OpenAI Gym environment for rein
 184 Dec 31, 2022
184 Dec 31, 2022

PyBullet CartPole and Quadrotor environments—with CasADi symbolic a priori dynamics—for learning-based control and reinforcement learning
safe-control-gym Physics-based CartPole and Quadrotor Gym environments (using PyBullet) with symbolic a priori dynamics (using CasADi) for learning-ba
 300 Dec 28, 2022
300 Dec 28, 2022
This solves the autonomous driving issue which is supported by deep learning technology. Given a video, it splits into images and predicts the angle of turning for each frame.
Self Driving Car An autonomous car (also known as a driverless car, self-driving car, and robotic car) is a vehicle that is capable of sensing its env
 4 Sep 4, 2021
4 Sep 4, 2021
Libraries, tools and tasks created and used at DeepMind Robotics.
Libraries, tools and tasks created and used at DeepMind Robotics.
270 Nov 30, 2022

A3C LSTM Atari with Pytorch plus A3G design
NEWLY ADDED A3G A NEW GPU/CPU ARCHITECTURE OF A3C FOR SUBSTANTIALLY ACCELERATED TRAINING!! RL A3C Pytorch NEWLY ADDED A3G!! New implementation of A3C
 532 Jan 2, 2023
532 Jan 2, 2023

Customizable RecSys Simulator for OpenAI Gym
gym-recsys: Customizable RecSys Simulator for OpenAI Gym Installation | How to use | Examples | Citation This package describes an OpenAI Gym interfac
 14 Dec 8, 2022
14 Dec 8, 2022

A "gym" style toolkit for building lightweight Neural Architecture Search systems
A "gym" style toolkit for building lightweight Neural Architecture Search systems
 12 Nov 5, 2022
12 Nov 5, 2022
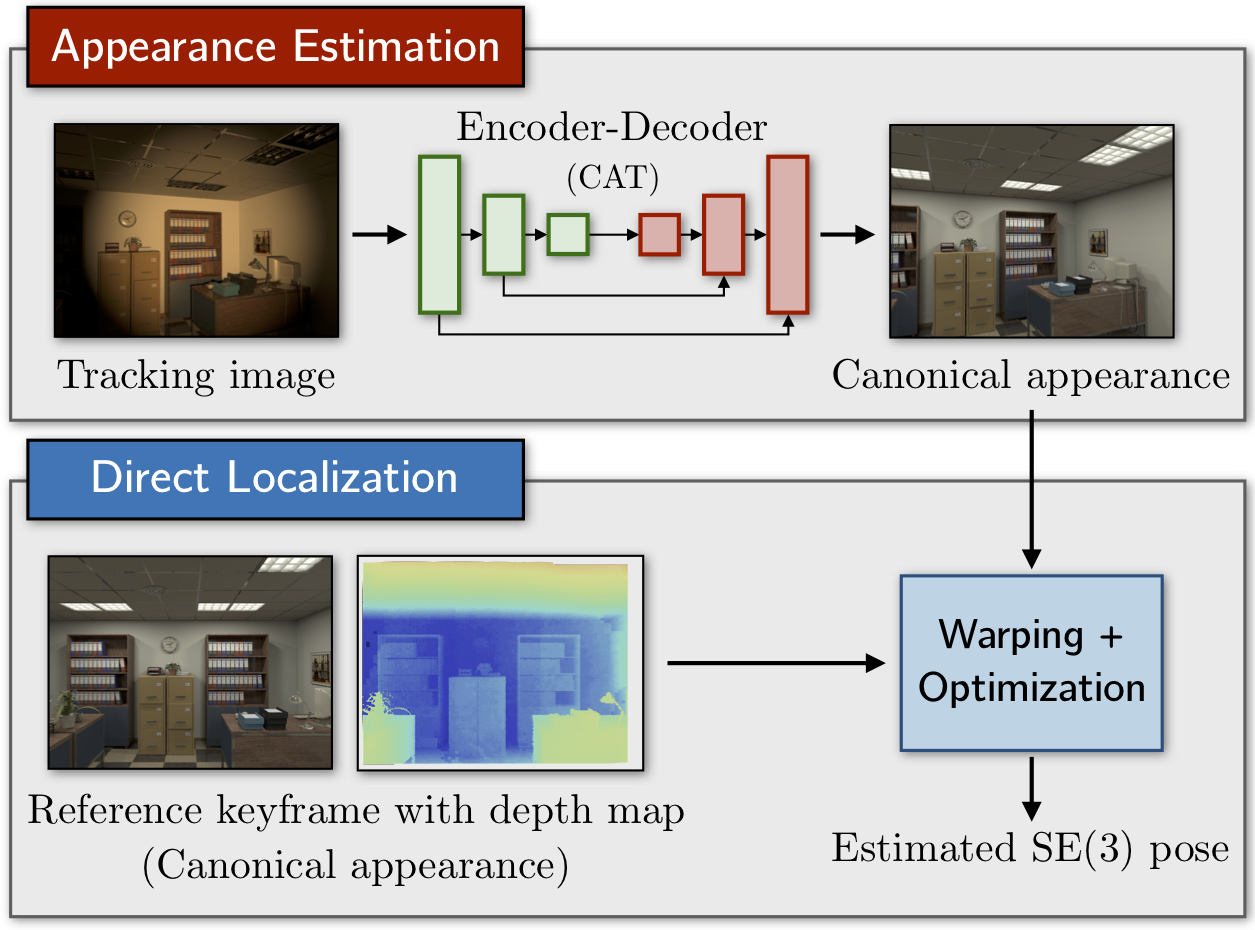
Canonical Appearance Transformations
CAT-Net: Learning Canonical Appearance Transformations Code to accompany our paper "How to Train a CAT: Learning Canonical Appearance Transformations
 54 Dec 24, 2022
54 Dec 24, 2022
YARR is Yet Another Robotics and Reinforcement learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
 21 Aug 1, 2021
21 Aug 1, 2021
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
Yet Another Robotics and Reinforcement (YARR) learning framework for PyTorch.
51 Dec 27, 2022

Set of utilities for exporting/controlling your robot in Blender
Blender Robotics Utils This repository contains utilities for exporting/controlling your robot in Blender Maintainers This repository is maintained by
 33 Nov 30, 2022
33 Nov 30, 2022
![[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design](https://github.com/eanswer/DiffHand/raw/master/demos/representative_image.jpg)
[RSS 2021] An End-to-End Differentiable Framework for Contact-Aware Robot Design
DiffHand This repository contains the implementation for the paper An End-to-End Differentiable Framework for Contact-Aware Robot Design (RSS 2021). I
 60 Jan 4, 2023
60 Jan 4, 2023
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
 43 Nov 21, 2022
43 Nov 21, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023
Implement A3C for Mujoco gym envs
pytorch-a3c-mujoco Disclaimer: my implementation right now is unstable (you ca refer to the learning curve below), I'm not sure if it's my problems. A
 70 Dec 12, 2022
70 Dec 12, 2022

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
 49 Nov 28, 2022
49 Nov 28, 2022
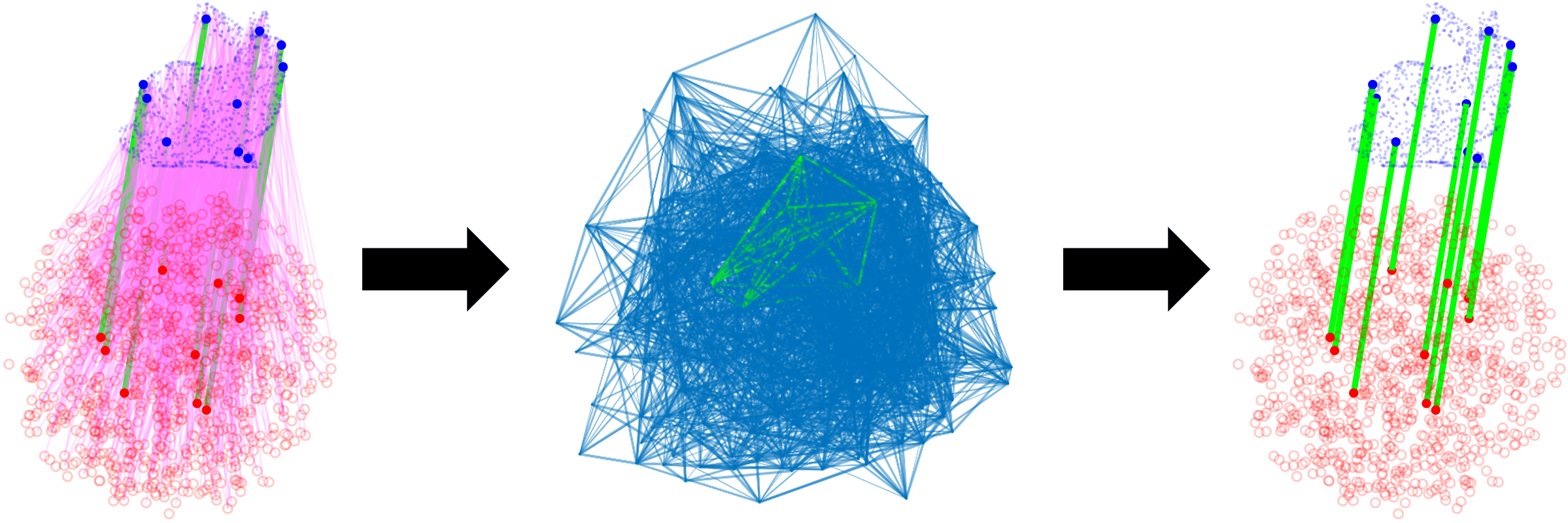
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022
CL-Gym: Full-Featured PyTorch Library for Continual Learning
CL-Gym: Full-Featured PyTorch Library for Continual Learning CL-Gym is a small yet very flexible library for continual learning research and developme
 36 Dec 25, 2022
36 Dec 25, 2022

gym-anm is a framework for designing reinforcement learning (RL) environments that model Active Network Management (ANM) tasks in electricity distribution networks.
gym-anm is a framework for designing reinforcement learning (RL) environments that model Active Network Management (ANM) tasks in electricity distribution networks. It is built on top of the OpenAI Gym toolkit.
 99 Dec 12, 2022
99 Dec 12, 2022
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
This is the dataset and code release of the OpenRooms Dataset.
This is the dataset and code release of the OpenRooms Dataset.
 95 Jan 8, 2023
95 Jan 8, 2023

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023

JAX code for the paper "Control-Oriented Model-Based Reinforcement Learning with Implicit Differentiation"
Optimal Model Design for Reinforcement Learning This repository contains JAX code for the paper Control-Oriented Model-Based Reinforcement Learning wi
 43 Sep 28, 2022
43 Sep 28, 2022

MasTrade is a trading bot in baselines3,pytorch,gym
mastrade MasTrade is a trading bot in baselines3,pytorch,gym idea we have for example 1 btc and we buy a crypto with it with market option to trade in
 18 May 24, 2022
18 May 24, 2022
Pytorch code for ICRA'21 paper: "Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation"
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation This repository is the pytorch implementation of our paper: Hierarchical Cr
44 Jan 6, 2023
Python sample codes for robotics algorithms.
PythonRobotics Python codes for robotics algorithm. Table of Contents What is this? Requirements Documentation How to use Localization Extended Kalman
 17.2k Jan 1, 2023
17.2k Jan 1, 2023

A collection of various RL algorithms like policy gradients, DQN and PPO. The goal of this repo will be to make it a go-to resource for learning about RL. How to visualize, debug and solve RL problems. I've additionally included playground.py for learning more about OpenAI gym, etc.
Reinforcement Learning (PyTorch) 🤖 + 🍰 = ❤️ This repo will contain PyTorch implementation of various fundamental RL algorithms. It's aimed at making
 123 Dec 23, 2022
123 Dec 23, 2022

This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
LiDARTag Overview This is a package for LiDARTag, described in paper: LiDARTag: A Real-Time Fiducial Tag System for Point Clouds (PDF)(arXiv). This wo
 159 Dec 21, 2022
159 Dec 21, 2022
Plug-n-Play Reinforcement Learning in Python with OpenAI Gym and JAX
coax is built on top of JAX, but it doesn't have an explicit dependence on the jax python package. The reason is that your version of jaxlib will depend on your CUDA version.
 128 Dec 27, 2022
128 Dec 27, 2022
Proto-RL: Reinforcement Learning with Prototypical Representations
Proto-RL: Reinforcement Learning with Prototypical Representations This is a PyTorch implementation of Proto-RL from Reinforcement Learning with Proto
 74 Dec 6, 2022
74 Dec 6, 2022
Official PyTorch implementation of Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yu
 63 Jan 3, 2023
63 Jan 3, 2023
Scalable, event-driven, deep-learning-friendly backtesting library
...Minimizing the mean square error on future experience. - Richard S. Sutton BTGym Scalable event-driven RL-friendly backtesting library. Build on
 922 Dec 27, 2022
922 Dec 27, 2022
Trading Gym is an open source project for the development of reinforcement learning algorithms in the context of trading.
Trading Gym Trading Gym is an open-source project for the development of reinforcement learning algorithms in the context of trading. It is currently
 535 Nov 15, 2022
535 Nov 15, 2022

Spatial Action Maps for Mobile Manipulation (RSS 2020)
spatial-action-maps Update: Please see our new spatial-intention-maps repository, which extends this work to multi-agent settings. It contains many ne
 27 Nov 30, 2022
27 Nov 30, 2022

Spatial Intention Maps for Multi-Agent Mobile Manipulation (ICRA 2021)
spatial-intention-maps This code release accompanies the following paper: Spatial Intention Maps for Multi-Agent Mobile Manipulation Jimmy Wu, Xingyua
70 Jan 2, 2023

Implementation of Kalman Filter in Python
Kalman Filter in Python This is a basic example of how Kalman filter works in Python. I do plan on refactoring and expanding this repo in the future.
 35 Sep 11, 2022
35 Sep 11, 2022
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
PyTorch version of Stable Baselines, reliable implementations of reinforcement learning algorithms.
 4.7k Jan 1, 2023
4.7k Jan 1, 2023

SSL_SLAM2: Lightweight 3-D Localization and Mapping for Solid-State LiDAR (mapping and localization separated) ICRA 2021
SSL_SLAM2 Lightweight 3-D Localization and Mapping for Solid-State LiDAR (Intel Realsense L515 as an example) This repo is an extension work of SSL_SL
 1.3k Jan 8, 2023
1.3k Jan 8, 2023

A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
Object Pose Estimation Demo This tutorial will go through the steps necessary to perform pose estimation with a UR3 robotic arm in Unity. You’ll gain
 187 Dec 24, 2022
187 Dec 24, 2022
Safe Bayesian Optimization
SafeOpt - Safe Bayesian Optimization This code implements an adapted version of the safe, Bayesian optimization algorithm, SafeOpt [1], [2]. It also p
 111 Dec 11, 2022
111 Dec 11, 2022
A fork of OpenAI Baselines, implementations of reinforcement learning algorithms
Stable Baselines Stable Baselines is a set of improved implementations of reinforcement learning algorithms based on OpenAI Baselines. You can read a
 3.7k Jan 1, 2023
3.7k Jan 1, 2023

Train robotic agents to learn pick and place with deep learning for vision-based manipulation in PyBullet.
Ravens is a collection of simulated tasks in PyBullet for learning vision-based robotic manipulation, with emphasis on pick and place. It features a Gym-like API with 10 tabletop rearrangement tasks, each with (i) a scripted oracle that provides expert demonstrations (for imitation learning), and (ii) reward functions that provide partial credit (for reinforcement learning).
 367 Jan 9, 2023
367 Jan 9, 2023
PaddleRobotics is an open-source algorithm library for robots based on Paddle, including open-source parts such as human-robot interaction, complex motion control, environment perception, SLAM positioning, and navigation.
简体中文 | English PaddleRobotics paddleRobotics是基于paddle的机器人开源算法库集,包括人机交互、复杂运动控制、环境感知、slam定位导航等开源算法部分。 人机交互 主动多模交互技术TFVT-HRI 主动多模交互技术是通过视觉、语音、触摸传感器等输入机器人
 185 Dec 26, 2022
185 Dec 26, 2022
An open source robotics benchmark for meta- and multi-task reinforcement learning
Meta-World Meta-World is an open-source simulated benchmark for meta-reinforcement learning and multi-task learning consisting of 50 distinct robotic
 823 Jan 6, 2023
823 Jan 6, 2023
Reinforcement Learning Coach by Intel AI Lab enables easy experimentation with state of the art Reinforcement Learning algorithms
Coach Coach is a python reinforcement learning framework containing implementation of many state-of-the-art algorithms. It exposes a set of easy-to-us
 2.2k Jan 5, 2023
2.2k Jan 5, 2023
Retro Games in Gym
Status: Maintenance (expect bug fixes and minor updates) Gym Retro Gym Retro lets you turn classic video games into Gym environments for reinforcement
 2.8k Jan 3, 2023
2.8k Jan 3, 2023
A toolkit for developing and comparing reinforcement learning algorithms.
Status: Maintenance (expect bug fixes and minor updates) OpenAI Gym OpenAI Gym is a toolkit for developing and comparing reinforcement learning algori
29.6k Jan 1, 2023
A toolkit for developing and comparing reinforcement learning algorithms.
Status: Maintenance (expect bug fixes and minor updates) OpenAI Gym OpenAI Gym is a toolkit for developing and comparing reinforcement learning algori
29.6k Jan 8, 2023