460 Repositories
Python ot-mapping-estimation Libraries

Pose estimation with MoveNet Lightning
Pose Estimation With MoveNet Lightning MoveNet is the TensorFlow pre-trained model that identifies 17 different key points of the human body. It is th
 2 Jan 4, 2022
2 Jan 4, 2022

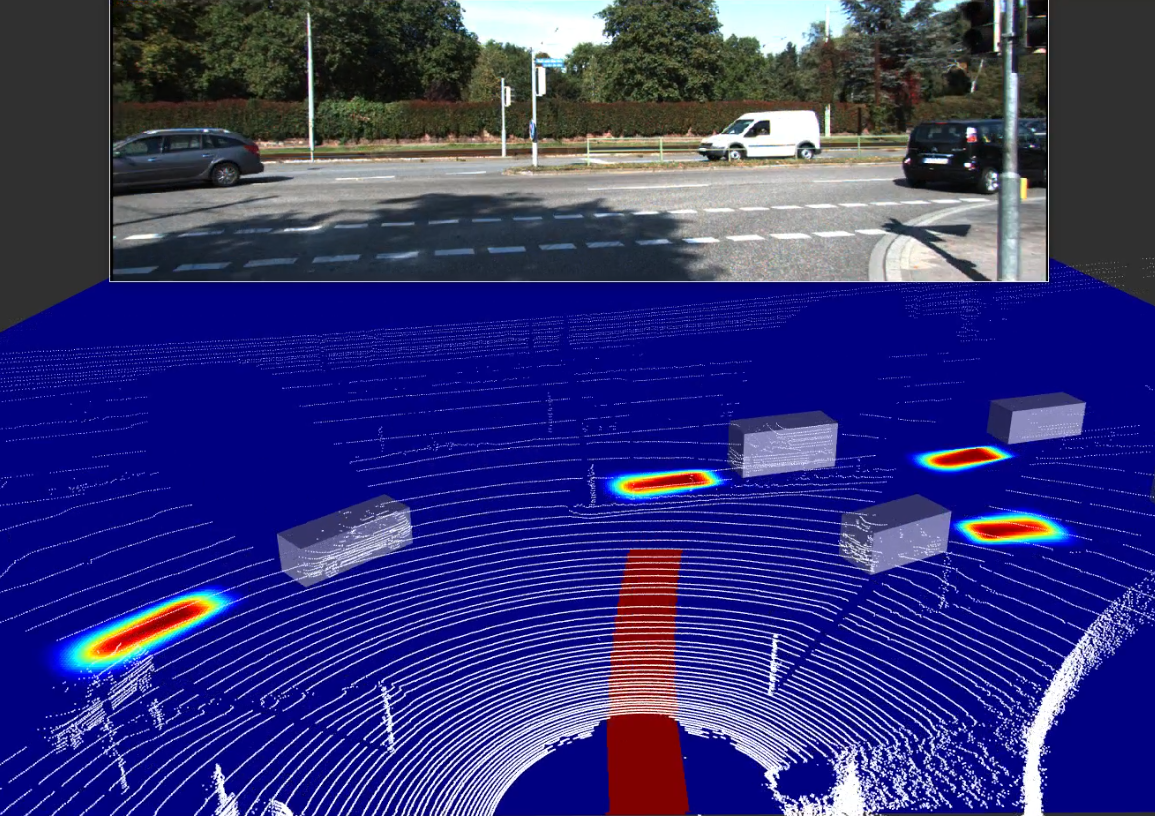
Object detection, 3D detection, and pose estimation using center point detection:
Objects as Points Object detection, 3D detection, and pose estimation using center point detection: Objects as Points, Xingyi Zhou, Dequan Wang, Phili
 6.7k Jan 3, 2023
6.7k Jan 3, 2023
healthy and lesion models for learning based on the joint estimation of stochasticity and volatility
health-lesion-stovol healthy and lesion models for learning based on the joint estimation of stochasticity and volatility Reference please cite this p
 5 Nov 1, 2022
5 Nov 1, 2022

A flexible submap-based framework towards spatio-temporally consistent volumetric mapping and scene understanding.
Panoptic Mapping This package contains panoptic_mapping, a general framework for semantic volumetric mapping. We provide, among other, a submap-based
 194 Dec 20, 2022
194 Dec 20, 2022
A real-time approach for mapping all human pixels of 2D RGB images to a 3D surface-based model of the body
DensePose: Dense Human Pose Estimation In The Wild Rıza Alp Güler, Natalia Neverova, Iasonas Kokkinos [densepose.org] [arXiv] [BibTeX] Dense human pos
 6.4k Jan 1, 2023
6.4k Jan 1, 2023

Human Pose estimation with TensorFlow framework
Human Pose Estimation with TensorFlow Here you can find the implementation of the Human Body Pose Estimation algorithm, presented in the DeeperCut and
 1.1k Dec 29, 2022
1.1k Dec 29, 2022
Simple Baselines for Human Pose Estimation and Tracking
Simple Baselines for Human Pose Estimation and Tracking News Our new work High-Resolution Representations for Labeling Pixels and Regions is available
 2.7k Jan 5, 2023
2.7k Jan 5, 2023

PyTorch implementation for 3D human pose estimation
Towards 3D Human Pose Estimation in the Wild: a Weakly-supervised Approach This repository is the PyTorch implementation for the network presented in:
579 Dec 22, 2022

 1.2k Dec 26, 2022
1.2k Dec 26, 2022

Single-stage Keypoint-based Category-level Object Pose Estimation from an RGB Image
CenterPose Overview This repository is the official implementation of the paper "Single-stage Keypoint-based Category-level Object Pose Estimation fro
 188 Dec 27, 2022
188 Dec 27, 2022
SALaD (Semi-Automatic Landslide Detection) is a landslide mapping system
SALaD (Semi-Automatic Landslide Detection) is a landslide mapping system. SALaD utilizes Object-based Image Analysis and Random Forest to map landslides.
 14 Jan 4, 2023
14 Jan 4, 2023
RATE: Overcoming Noise and Sparsity of Textual Features in Real-Time Location Estimation (CIKM'17)
RATE: Overcoming Noise and Sparsity of Textual Features in Real-Time Location Estimation This is the implementation of RATE: Overcoming Noise and Spar
 5 Feb 10, 2022
5 Feb 10, 2022
Code for "Sparse Steerable Convolutions: An Efficient Learning of SE(3)-Equivariant Features for Estimation and Tracking of Object Poses in 3D Space"
Sparse Steerable Convolution (SS-Conv) Code for "Sparse Steerable Convolutions: An Efficient Learning of SE(3)-Equivariant Features for Estimation and
 25 Dec 21, 2022
25 Dec 21, 2022
Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS 2021), and the code to generate simulation results.
Scalable Intervention Target Estimation in Linear Models Implementation of the paper Scalable Intervention Target Estimation in Linear Models (NeurIPS
 0 Oct 25, 2021
0 Oct 25, 2021

KAPAO is an efficient multi-person human pose estimation model that detects keypoints and poses as objects and fuses the detections to predict human poses.
KAPAO (Keypoints and Poses as Objects) KAPAO is an efficient single-stage multi-person human pose estimation model that models keypoints and poses as
 664 Dec 30, 2022
664 Dec 30, 2022
Source code for paper "Deep Diffusion Models for Robust Channel Estimation", TBA.
diffusion-channels Source code for paper "Deep Diffusion Models for Robust Channel Estimation". Generic flow: Use 'matlab/main.mat' to generate traini
 15 Dec 22, 2022
15 Dec 22, 2022
Learning a mapping from images to psychological similarity spaces with neural networks.
LearningPsychologicalSpaces v0.1: v1.1: v1.2: v1.3: v1.4: v1.5: The code in this repository explores learning a mapping from images to psychological s
 8 Dec 12, 2022
8 Dec 12, 2022

RRxIO - Robust Radar Visual/Thermal Inertial Odometry: Robust and accurate state estimation even in challenging visual conditions.
RRxIO - Robust Radar Visual/Thermal Inertial Odometry RRxIO offers robust and accurate state estimation even in challenging visual conditions. RRxIO c
 64 Dec 29, 2022
64 Dec 29, 2022
The repository contains source code and models to use PixelNet architecture used for various pixel-level tasks. More details can be accessed at http://www.cs.cmu.edu/~aayushb/pixelNet/.
PixelNet: Representation of the pixels, by the pixels, and for the pixels. We explore design principles for general pixel-level prediction problems, f
 196 Aug 10, 2022
196 Aug 10, 2022

the official code for ICRA 2021 Paper: "Multimodal Scale Consistency and Awareness for Monocular Self-Supervised Depth Estimation"
G2S This is the official code for ICRA 2021 Paper: Multimodal Scale Consistency and Awareness for Monocular Self-Supervised Depth Estimation by Hemang
 4 Jul 27, 2022
4 Jul 27, 2022

Official PyTorch Implementation for "Recurrent Video Deblurring with Blur-Invariant Motion Estimation and Pixel Volumes"
PVDNet: Recurrent Video Deblurring with Blur-Invariant Motion Estimation and Pixel Volumes This repository contains the official PyTorch implementatio
 98 Nov 6, 2022
98 Nov 6, 2022
Neural network-based build time estimation for additive manufacturing
Neural network-based build time estimation for additive manufacturing Oh, Y., Sharp, M., Sprock, T., & Kwon, S. (2021). Neural network-based build tim
 1 Nov 15, 2021
1 Nov 15, 2021
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees This repository is the official implementation of the empirica
 2 Oct 2, 2022
2 Oct 2, 2022
Implementation of the state of the art beat-detection, downbeat-detection and tempo-estimation model
The ISMIR 2020 Beat Detection, Downbeat Detection and Tempo Estimation Model Implementation. This is an implementation in TensorFlow to implement the
 1 Nov 12, 2021
1 Nov 12, 2021

Code and models for "Pano3D: A Holistic Benchmark and a Solid Baseline for 360 Depth Estimation", OmniCV Workshop @ CVPR21.
Pano3D A Holistic Benchmark and a Solid Baseline for 360o Depth Estimation Pano3D is a new benchmark for depth estimation from spherical panoramas. We
 50 Dec 29, 2022
50 Dec 29, 2022
ObjTables: Tools for creating and reusing high-quality spreadsheets
ObjTables: Tools for creating and reusing high-quality spreadsheets ObjTables is a toolkit which makes it easy to use spreadsheets (e.g., XLSX workboo
 7 Jun 14, 2021
7 Jun 14, 2021
Part-aware Measurement for Robust Multi-View Multi-Human 3D Pose Estimation and Tracking
Part-aware Measurement for Robust Multi-View Multi-Human 3D Pose Estimation and Tracking Part-Aware Measurement for Robust Multi-View Multi-Human 3D P
 19 Oct 27, 2022
19 Oct 27, 2022

Direct Multi-view Multi-person 3D Human Pose Estimation
Implementation of NeurIPS-2021 paper: Direct Multi-view Multi-person 3D Human Pose Estimation [paper] [video-YouTube, video-Bilibili] [slides] This is
 251 Dec 30, 2022
251 Dec 30, 2022
Collision risk estimation using stochastic motion models
collision_risk_estimation Collision risk estimation using stochastic motion models. This is a new approach, based on stochastic models, to predict the
 7 Jun 26, 2022
7 Jun 26, 2022

Daily social mapping project in November 2021. Maps made using PyGMT whenever possible.
Daily social mapping project in November 2021. Maps made using PyGMT whenever possible.
 20 Nov 24, 2022
20 Nov 24, 2022
Direct Multi-view Multi-person 3D Human Pose Estimation
Implementation of NeurIPS-2021 paper: Direct Multi-view Multi-person 3D Human Pose Estimation [paper] [video-YouTube, video-Bilibili] [slides] This is
253 Jan 5, 2023

PyTorch Implementation of Temporal Output Discrepancy for Active Learning, ICCV 2021
Temporal Output Discrepancy for Active Learning PyTorch implementation of Semi-Supervised Active Learning with Temporal Output Discrepancy, ICCV 2021.
 33 Dec 6, 2022
33 Dec 6, 2022

Generalizing Gaze Estimation with Outlier-guided Collaborative Adaptation
Generalizing Gaze Estimation with Outlier-guided Collaborative Adaptation Our paper is accepted by ICCV2021. Picture: Overview of the proposed Plug-an
 32 Dec 10, 2022
32 Dec 10, 2022
[ICCV 2021] Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation
ADDS-DepthNet This is the official implementation of the paper Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation I
 52 Nov 24, 2022
52 Nov 24, 2022
Code repo for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper.
InterpretableMDE A PyTorch implementation for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper. arXiv link: https://arxiv.or
 16 Aug 12, 2022
16 Aug 12, 2022
Probabilistic-Monocular-3D-Human-Pose-Estimation-with-Normalizing-Flows
Probabilistic-Monocular-3D-Human-Pose-Estimation-with-Normalizing-Flows This is the official implementation of the ICCV 2021 Paper "Probabilistic Mono
 62 Nov 23, 2022
62 Nov 23, 2022

Non-Homogeneous Poisson Process Intensity Modeling and Estimation using Measure Transport
Non-Homogeneous Poisson Process Intensity Modeling and Estimation using Measure Transport This GitHub page provides code for reproducing the results i
 1 Nov 8, 2021
1 Nov 8, 2021

RSC-Net: 3D Human Pose, Shape and Texture from Low-Resolution Images and Videos
RSC-Net: 3D Human Pose, Shape and Texture from Low-Resolution Images and Videos Implementation for "3D Human Pose, Shape and Texture from Low-Resoluti
 42 Nov 10, 2022
42 Nov 10, 2022
NeuTex: Neural Texture Mapping for Volumetric Neural Rendering
NeuTex: Neural Texture Mapping for Volumetric Neural Rendering Paper: https://arxiv.org/abs/2103.00762 Running Run on the provided DTU scene cd run ba
 68 Jan 6, 2023
68 Jan 6, 2023
An unofficial personal implementation of UM-Adapt, specifically to tackle joint estimation of panoptic segmentation and depth prediction for autonomous driving datasets.
Semisupervised Multitask Learning This repository is an unofficial and slightly modified implementation of UM-Adapt[1] using PyTorch. This code primar
 11 Nov 25, 2022
11 Nov 25, 2022

Code for BMVC2021 "MOS: A Low Latency and Lightweight Framework for Face Detection, Landmark Localization, and Head Pose Estimation"
MOS-Multi-Task-Face-Detect Introduction This repo is the official implementation of "MOS: A Low Latency and Lightweight Framework for Face Detection,
 104 Dec 8, 2022
104 Dec 8, 2022

A comprehensive tutorial for plotting focal mechanism
Focal_Mechanisms_Demo A comprehensive tutorial for plotting focal mechanism "beach-balls" using the PyGMT package for Python. (Resulting map of this d
 3 Dec 13, 2022
3 Dec 13, 2022
Honours project, on creating a depth estimation map from two stereo images of featureless regions
image-processing This module generates depth maps for shape-blocked-out images Install If working with anaconda, then from the root directory: conda e
 2 Oct 17, 2022
2 Oct 17, 2022

In this tutorial, raster models of soil depth and soil water holding capacity for the United States will be sampled at random geographic coordinates within the state of Colorado.
Raster_Sampling_Demo (Resulting graph of this demo) Background Sampling values of a raster at specific geographic coordinates can be done with a numbe
2 Dec 13, 2022
This is python script that will extract the functions call in all used DLL in an executable and then provide a mapping of those functions to the attack classes defined and curated malapi.io.
F2Amapper This is python script that will extract the functions call in all used DLL in an executable and then provide a mapping of those functions to
 3 Sep 3, 2022
3 Sep 3, 2022
Code and results accompanying our paper titled Mixture Proportion Estimation and PU Learning: A Modern Approach at Neurips 2021 (Spotlight)
Mixture Proportion Estimation and PU Learning: A Modern Approach This repository is the official implementation of Mixture Proportion Estimation and P
 23 Dec 28, 2022
23 Dec 28, 2022

HHP-Net: A light Heteroscedastic neural network for Head Pose estimation with uncertainty
HHP-Net: A light Heteroscedastic neural network for Head Pose estimation with uncertainty Giorgio Cantarini, Francesca Odone, Nicoletta Noceti, Federi
 18 Aug 2, 2022
18 Aug 2, 2022

Elucidating Robust Learning with Uncertainty-Aware Corruption Pattern Estimation
Elucidating Robust Learning with Uncertainty-Aware Corruption Pattern Estimation Introduction 📋 Official implementation of Explainable Robust Learnin
 6 Apr 19, 2022
6 Apr 19, 2022

Monocular 3D pose estimation. OpenVINO. CPU inference or iGPU (OpenCL) inference.
human-pose-estimation-3d-python-cpp RealSenseD435 (RGB) 480x640 + CPU Corei9 45 FPS (Depth is not used) 1. Run 1-1. RealSenseD435 (RGB) 480x640 + CPU
 8 Oct 3, 2022
8 Oct 3, 2022
Code for "SRHEN: Stepwise-Refining Homography Estimation Network via Parsing Geometric Correspondences in Deep Latent Space"
SRHEN This is a better and simpler implementation for "SRHEN: Stepwise-Refining Homography Estimation Network via Parsing Geometric Correspondences in
 1 Oct 28, 2022
1 Oct 28, 2022

Tensorflow implementation and notebooks for Implicit Maximum Likelihood Estimation
tf-imle Tensorflow 2 and PyTorch implementation and Jupyter notebooks for Implicit Maximum Likelihood Estimation (I-MLE) proposed in the NeurIPS 2021
 69 Dec 13, 2022
69 Dec 13, 2022

3D Pose Estimation for Vehicles
3D Pose Estimation for Vehicles Introduction This work generates 4 key-points and 2 key-edges from vertices and edges of vehicles as ground truth. The
 1 Nov 1, 2021
1 Nov 1, 2021
Python library for analysis of time series data including dimensionality reduction, clustering, and Markov model estimation
deeptime Releases: Installation via conda recommended. conda install -c conda-forge deeptime pip install deeptime Documentation: deeptime-ml.github.io
 495 Dec 28, 2022
495 Dec 28, 2022
Tiny command-line utility for mapping broken keys to other positions.
brokenkey Tiny command-line utility for mapping broken keys to other positions. Installation Clone this repository using git: git clone https://github
 0 Oct 4, 2021
0 Oct 4, 2021

Testing and Estimation of structural breaks in Stata
xtbreak estimating and testing for many known and unknown structural breaks in time series and panel data. For an overview of xtbreak test see xtbreak
 13 Jun 19, 2022
13 Jun 19, 2022
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees
ResNEsts and DenseNEsts: Block-based DNN Models with Improved Representation Guarantees This repository is the official implementation of the empirica
2 Oct 2, 2022
Contains supplementary materials for reproduce results in HMC divergence time estimation manuscript
Scalable Bayesian divergence time estimation with ratio transformations This repository contains the instructions and files to reproduce the analyses
 1 Sep 21, 2022
1 Sep 21, 2022

Attack on Confidence Estimation algorithm from the paper "Disrupting Deep Uncertainty Estimation Without Harming Accuracy"
Attack on Confidence Estimation (ACE) This repository is the official implementation of "Disrupting Deep Uncertainty Estimation Without Harming Accura
 3 Mar 30, 2022
3 Mar 30, 2022

Code repository for the paper: Hierarchical Kinematic Probability Distributions for 3D Human Shape and Pose Estimation from Images in the Wild (ICCV 2021)
Hierarchical Kinematic Probability Distributions for 3D Human Shape and Pose Estimation from Images in the Wild Akash Sengupta, Ignas Budvytis, Robert
 149 Dec 14, 2022
149 Dec 14, 2022

Light-weight network, depth estimation, knowledge distillation, real-time depth estimation, auxiliary data.
light-weight-depth-estimation Boosting Light-Weight Depth Estimation Via Knowledge Distillation, https://arxiv.org/abs/2105.06143 Junjie Hu, Chenyou F
 13 Dec 10, 2022
13 Dec 10, 2022

PoseCamera is python based SDK for human pose estimation through RGB webcam.
PoseCamera PoseCamera is python based SDK for human pose estimation through RGB webcam. Install install posecamera package through pip pip install pos
 7 Jul 20, 2021
7 Jul 20, 2021

Test-Time Personalization with a Transformer for Human Pose Estimation, NeurIPS 2021
Transforming Self-Supervision in Test Time for Personalizing Human Pose Estimation This is an official implementation of the NeurIPS 2021 paper: Trans
 41 Nov 28, 2022
41 Nov 28, 2022

PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
Unsupervised Depth Completion with Calibrated Backprojection Layers PyTorch implementation of Unsupervised Depth Completion with Calibrated Backprojec
 80 Dec 13, 2022
80 Dec 13, 2022

Relative Uncertainty Learning for Facial Expression Recognition
Relative Uncertainty Learning for Facial Expression Recognition The official implementation of the following paper at NeurIPS2021: Title: Relative Unc
 35 Dec 28, 2022
35 Dec 28, 2022

my graduation project is about live human face augmentation by projection mapping by using CNN
Live-human-face-expression-augmentation-by-projection my graduation project is about live human face augmentation by projection mapping by using CNN o
 1 Mar 8, 2022
1 Mar 8, 2022
A multi-page streamlit app for the geospatial community.
A multi-page streamlit app for the geospatial community.
 522 Dec 30, 2022
522 Dec 30, 2022
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
80 Dec 13, 2022

This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021
DIFFNet This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021 A new backbone for self-supervised d
 3 Oct 22, 2021
3 Oct 22, 2021
Joint Gaussian Graphical Model Estimation: A Survey
Joint Gaussian Graphical Model Estimation: A Survey Test Models Fused graphical lasso [1] Group graphical lasso [1] Graphical lasso [1] Doubly joint s
 1 Aug 10, 2022
1 Aug 10, 2022
Implicit hierarchical a posteriori error estimates in FEniCSx
FEniCSx Error Estimation (FEniCSx-EE) Description FEniCSx-EE is an open source library showing how various error estimation strategies can be implemen
 1 Dec 8, 2021
1 Dec 8, 2021
![[BMVC 2021] Official PyTorch Implementation of Self-supervised learning of Image Scale and Orientation Estimation](https://github.com/bluedream1121/self-sca-ori/raw/main/assets/architecture.png)
[BMVC 2021] Official PyTorch Implementation of Self-supervised learning of Image Scale and Orientation Estimation
Self-Supervised Learning of Image Scale and Orientation Estimation (BMVC 2021) This is the official implementation of the paper "Self-Supervised Learn
 17 Nov 10, 2022
17 Nov 10, 2022

PyGMT - A Python interface for the Generic Mapping Tools
PyGMT A Python interface for the Generic Mapping Tools Documentation (development version) | Contact | Try Online Why PyGMT? A beautiful map is worth
 564 Dec 28, 2022
564 Dec 28, 2022

LWCC: A LightWeight Crowd Counting library for Python that includes several pretrained state-of-the-art models.
LWCC: A LightWeight Crowd Counting library for Python LWCC is a lightweight crowd counting framework for Python. It wraps four state-of-the-art models
 39 Dec 28, 2022
39 Dec 28, 2022
EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation
EFENet EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation Code is a bit messy now. I woud clean up soon. For training the EF
 6 Oct 20, 2021
6 Oct 20, 2021

A Python package implementing various HDRI / Radiance image processing algorithms.
Colour - HDRI A Python package implementing various HDRI / Radiance image processing algorithms. It is open source and freely available under the New
 111 Dec 6, 2022
111 Dec 6, 2022
This is the 3D Implementation of 《Inconsistency-aware Uncertainty Estimation for Semi-supervised Medical Image Segmentation》
CoraNet This is the 3D Implementation of 《Inconsistency-aware Uncertainty Estimation for Semi-supervised Medical Image Segmentation》 Environment pytor
 25 Nov 8, 2022
25 Nov 8, 2022

Real-time Neural Representation Fusion for Robust Volumetric Mapping
NeuralBlox: Real-Time Neural Representation Fusion for Robust Volumetric Mapping Paper | Supplementary This repository contains the implementation of
106 Dec 24, 2022

Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model in Tensorflow Lite.
TFLite-msg_chn_wacv20-depth-completion Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model
 2 Oct 4, 2021
2 Oct 4, 2021
EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation
EFENet EFENet: Reference-based Video Super-Resolution with Enhanced Flow Estimation Code is a bit messy now. I woud clean up soon. For training the EF
19 Nov 5, 2022

This repository contains the code for "SBEVNet: End-to-End Deep Stereo Layout Estimation" paper by Divam Gupta, Wei Pu, Trenton Tabor, Jeff Schneider
SBEVNet: End-to-End Deep Stereo Layout Estimation This repository contains the code for "SBEVNet: End-to-End Deep Stereo Layout Estimation" paper by D
 19 Dec 17, 2022
19 Dec 17, 2022

Propose a principled and practically effective framework for unsupervised accuracy estimation and error detection tasks with theoretical analysis and state-of-the-art performance.
Detecting Errors and Estimating Accuracy on Unlabeled Data with Self-training Ensembles This project is for the paper: Detecting Errors and Estimating
 13 Nov 21, 2022
13 Nov 21, 2022
BioMASS - A Python Framework for Modeling and Analysis of Signaling Systems
Mathematical modeling is a powerful method for the analysis of complex biological systems. Although there are many researches devoted on produ
 22 Dec 27, 2022
22 Dec 27, 2022

PN-Net a neural field-based framework for depth estimation from single-view RGB images.
PN-Net We present a neural field-based framework for depth estimation from single-view RGB images. Rather than representing a 2D depth map as a single
 1 Oct 2, 2021
1 Oct 2, 2021

A numpy-based implementation of RANSAC for fundamental matrix and homography estimation. The degeneracy updating and local optimization components are included and optional.
Description A numpy-based implementation of RANSAC for fundamental matrix and homography estimation. The degeneracy updating and local optimization co
 9 Nov 10, 2022
9 Nov 10, 2022
SGoLAM - Simultaneous Goal Localization and Mapping
SGoLAM - Simultaneous Goal Localization and Mapping PyTorch implementation of the MultiON runner-up entry, SGoLAM: Simultaneous Goal Localization and
 10 Jan 5, 2023
10 Jan 5, 2023
OpenFace – a state-of-the art tool intended for facial landmark detection, head pose estimation, facial action unit recognition, and eye-gaze estimation.
OpenFace 2.2.0: a facial behavior analysis toolkit Over the past few years, there has been an increased interest in automatic facial behavior analysis
 5.8k Dec 31, 2022
5.8k Dec 31, 2022

RIFE: Real-Time Intermediate Flow Estimation for Video Frame Interpolation
RIFE - Real Time Video Interpolation arXiv | YouTube | Colab | Tutorial | Demo Table of Contents Introduction Collection Usage Evaluation Training and
 3k Jan 4, 2023
3k Jan 4, 2023
Next-Best-View Estimation based on Deep Reinforcement Learning for Active Object Classification
next_best_view_rl Setup Clone the repository: git clone --recurse-submodules ... In 'third_party/zed-ros-wrapper': git checkout devel Install mujoco `
 1 Feb 15, 2022
1 Feb 15, 2022

The source code for 'Noisy-Labeled NER with Confidence Estimation' accepted by NAACL 2021
Kun Liu*, Yao Fu*, Chuanqi Tan, Mosha Chen, Ningyu Zhang, Songfang Huang, Sheng Gao. Noisy-Labeled NER with Confidence Estimation. NAACL 2021. [arxiv]
 30 Nov 12, 2022
30 Nov 12, 2022

Regularizing Nighttime Weirdness: Efficient Self-supervised Monocular Depth Estimation in the Dark (ICCV 2021)
Regularizing Nighttime Weirdness: Efficient Self-supervised Monocular Depth Estimation in the Dark (ICCV 2021) Kun Wang, Zhenyu Zhang, Zhiqiang Yan, X
 66 Nov 24, 2022
66 Nov 24, 2022

GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape Completion
GarmentNets This repository contains the source code for the paper GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape
 43 Nov 21, 2022
43 Nov 21, 2022

Web service for facial landmark detection, head pose estimation, facial action unit recognition, and eye-gaze estimation based on OpenFace 2.0
OpenGaze: Web Service for OpenFace Facial Behaviour Analysis Toolkit Overview OpenFace is a fantastic tool intended for computer vision and machine le
 4 Nov 3, 2022
4 Nov 3, 2022
Source code for the paper "SEPP: Similarity Estimation of Predicted Probabilities for Defending and Detecting Adversarial Text" PACLIC 2021
Adversarial text generator Refer to "adversarial_text_generator"[https://github.com/quocnsh/SEPP_generator] project for generating adversarial texts A
 0 Oct 5, 2021
0 Oct 5, 2021

Code for ICCV2021 paper PARE: Part Attention Regressor for 3D Human Body Estimation
PARE: Part Attention Regressor for 3D Human Body Estimation [ICCV 2021] PARE: Part Attention Regressor for 3D Human Body Estimation, Muhammed Kocabas,
 277 Jan 3, 2023
277 Jan 3, 2023

EM-POSE 3D Human Pose Estimation from Sparse Electromagnetic Trackers.
EM-POSE: 3D Human Pose Estimation from Sparse Electromagnetic Trackers This repository contains the code to our paper published at ICCV 2021. For ques
62 Dec 14, 2022

Code for ICCV2021 paper SPEC: Seeing People in the Wild with an Estimated Camera
SPEC: Seeing People in the Wild with an Estimated Camera [ICCV 2021] SPEC: Seeing People in the Wild with an Estimated Camera, Muhammed Kocabas, Chun-
187 Dec 26, 2022
COVINS -- A Framework for Collaborative Visual-Inertial SLAM and Multi-Agent 3D Mapping
COVINS -- A Framework for Collaborative Visual-Inertial SLAM and Multi-Agent 3D Mapping Version 1.0 COVINS is an accurate, scalable, and versatile vis
 183 Dec 27, 2022
183 Dec 27, 2022
![[ICRA2021] Reconstructing Interactive 3D Scene by Panoptic Mapping and CAD Model Alignment](https://github.com/hmz-15/Interactive-Scene-Reconstruction/raw/main/motivation.jpg)
[ICRA2021] Reconstructing Interactive 3D Scene by Panoptic Mapping and CAD Model Alignment
Interactive Scene Reconstruction Project Page | Paper This repository contains the implementation of our ICRA2021 paper Reconstructing Interactive 3D
 97 Dec 28, 2022
97 Dec 28, 2022

Large Scale Multi-Illuminant (LSMI) Dataset for Developing White Balance Algorithm under Mixed Illumination
Large Scale Multi-Illuminant (LSMI) Dataset for Developing White Balance Algorithm under Mixed Illumination (ICCV 2021) Dataset License This work is l
 33 Jan 4, 2023
33 Jan 4, 2023

Original Pytorch Implementation of FLAME: Facial Landmark Heatmap Activated Multimodal Gaze Estimation
FLAME Original Pytorch Implementation of FLAME: Facial Landmark Heatmap Activated Multimodal Gaze Estimation, accepted at the 17th IEEE Internation Co
 19 Dec 17, 2022
19 Dec 17, 2022