478 Repositories
Python point-cloud Libraries
PyTorch implementation for View-Guided Point Cloud Completion
PyTorch implementation for View-Guided Point Cloud Completion
 22 Jan 4, 2023
22 Jan 4, 2023
Float2Binary - A simple python class which finds the binary representation of a floating-point number.
Float2Binary A simple python class which finds the binary representation of a floating-point number. You can find a class in IEEE754.py file with the
 3 Dec 14, 2021
3 Dec 14, 2021
This is a public repo where code samples are stored for the book Practical MLOps.
[Book-2021] Practical MLOps O'Reilly Book
 421 Dec 31, 2022
421 Dec 31, 2022

Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021)
Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021) This repository contains the code
 149 Dec 15, 2022
149 Dec 15, 2022
Work with the AWS IP address ranges in native Python.
Amazon Web Services (AWS) publishes its current IP address ranges in JSON format. Python v3 provides an ipaddress module in the standard library that allows you to create, manipulate, and perform operations on IPv4 and IPv6 addresses and networks. Wouldn't it be nice if you could work with the AWS IP address ranges like native Python objects?
 9 Aug 25, 2022
9 Aug 25, 2022

DGCNN - Dynamic Graph CNN for Learning on Point Clouds
DGCNN is the author's re-implementation of Dynamic Graph CNN, which achieves state-of-the-art performance on point-cloud-related high-level tasks including category classification, semantic segmentation and part segmentation.
 1.3k Dec 26, 2022
1.3k Dec 26, 2022
Write maintainable, production-ready pipelines using Jupyter or your favorite text editor. Develop locally, deploy to the cloud. ☁️
Write maintainable, production-ready pipelines using Jupyter or your favorite text editor. Develop locally, deploy to the cloud. ☁️
 2.9k Jan 6, 2023
2.9k Jan 6, 2023
Confirm that files have been uploaded to Backblaze Cloud Backup successfully
Backblaze Backup Checker This Python script compares metadata captured from files within source folders against data parsed from Backblaze Cloud Backu
 18 Jul 29, 2022
18 Jul 29, 2022
An inofficial PyTorch implementation of PREDATOR based on KPConv.
PREDATOR: Registration of 3D Point Clouds with Low Overlap An inofficial PyTorch implementation of PREDATOR based on KPConv. The code has been tested
 14 Aug 3, 2022
14 Aug 3, 2022
triggercmd is a CLI client for the TRIGGERcmd cloud service.
TriggerCMD CLI client triggercmd is a CLI client for the TRIGGERcmd cloud service. installation the triggercmd package is available in PyPI. to instal
 7 Oct 18, 2022
7 Oct 18, 2022

An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
 33 Jan 3, 2023
33 Jan 3, 2023
Point Cloud Registration using Representative Overlapping Points.
Point Cloud Registration using Representative Overlapping Points (ROPNet) Abstract 3D point cloud registration is a fundamental task in robotics and c
36 Dec 16, 2022
A git extension for seeing your Cloud Build deployment
A git extension for seeing your Cloud Build deployment
 13 May 10, 2022
13 May 10, 2022

This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction".
TreePartNet This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction". Depende
 34 Nov 30, 2022
34 Nov 30, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022
Point cloud processing tool library.
Point Cloud ToolBox This point cloud processing tool library can be used to process point clouds, 3d meshes, and voxels. Environment python 3.7.5 Dep
 40 Dec 9, 2022
40 Dec 9, 2022
Code for the paper "Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds" (ICCV 2021)
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds This is the official code implementation for the paper "Spatio-temporal Se
 63 Jan 5, 2023
63 Jan 5, 2023
Code Release for ICCV 2021 (oral), "AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds"
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds (ICCV 2021 oral) **Project Page | Arxiv ** Runsong Zhu¹, Yuan Liu², Zhen Dong¹, Te
 40 Dec 30, 2022
40 Dec 30, 2022
Material related to the Principles of Cloud Computing course.
CloudComputingCourse Material related to the Principles of Cloud Computing course. This repository comprises material that I use to teach my Principle
 15 Dec 2, 2022
15 Dec 2, 2022
gcp-doctor - Diagnostics for Google Cloud Platform
gcp-doctor is a command-line diagnostics tool for GCP customers. It finds and helps to fix common issues in Google Cloud Platform projects. It is used to test projects against a wide range of best-practices and frequent mistakes, based on the troubleshooting experience of the Google Cloud Support team.
 185 Dec 20, 2022
185 Dec 20, 2022

Source code for the paper "TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations"
TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations Created by Jiahao Pang, Duanshun Li, and Dong Tian from InterDigital In
 21 Dec 29, 2022
21 Dec 29, 2022
Adaptive Graph Convolution for Point Cloud Analysis
Adaptive Graph Convolution for Point Cloud Analysis This repository contains the implementation of AdaptConv for point cloud analysis. Adaptive Graph
 64 Dec 21, 2022
64 Dec 21, 2022
Python Dialogflow CX Scripting API (SCRAPI)
Python Dialogflow CX Scripting API (SCRAPI) A high level scripting API for bot builders, developers, and maintainers. Table of Contents Introduction W
39 Dec 9, 2022
asyncio client for Deta Cloud
aiodeta Unofficial client for Deta Clound Install pip install aiodeta Supported functionality Deta Base Deta Drive Decorator for cron tasks Examples i
 19 Feb 14, 2022
19 Feb 14, 2022

Microsoft Azure CLI - Azure Command-Line Interface
A great cloud needs great tools; we're excited to introduce Azure CLI, our next generation multi-platform command line experience for Azure.
 3.4k Dec 30, 2022
3.4k Dec 30, 2022
txtai executes machine-learning workflows to transform data and build AI-powered semantic search applications.
txtai executes machine-learning workflows to transform data and build AI-powered semantic search applications.
 3.1k Dec 31, 2022
3.1k Dec 31, 2022
Sail is a free CLI tool to deploy, manage and scale WordPress applications in the DigitalOcean cloud.
Deploy WordPress to DigitalOcean with Sail Sail is a free CLI tool to deploy, manage and scale WordPress applications in the DigitalOcean cloud. Conte
 159 Dec 12, 2022
159 Dec 12, 2022

AWSXenos will list all the trust relationships in all the IAM roles and S3 buckets
AWS External Account Scanner Xenos, is Greek for stranger. AWSXenos will list all the trust relationships in all the IAM roles, and S3 buckets, in an
 57 Nov 7, 2022
57 Nov 7, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
 101 Dec 5, 2022
101 Dec 5, 2022

machine learning model deployment project of Iris classification model in a minimal UI using flask web framework and deployed it in Azure cloud using Azure app service
This is a machine learning model deployment project of Iris classification model in a minimal UI using flask web framework and deployed it in Azure cloud using Azure app service. We initially made this project as a requirement for an internship at Indian Servers. We are now making it open to contribution.
 73 Dec 1, 2022
73 Dec 1, 2022

You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors
You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors In this paper, we propose a novel local descriptor-based fra
 80 Dec 15, 2022
80 Dec 15, 2022

CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework
CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework This repository contains a framework for Recommender Systems (RecSys), a
 8 Jul 3, 2022
8 Jul 3, 2022

How to use COG's (Cloud optimized GeoTIFFs) with Rasterio
How to use COG's (Cloud optimized GeoTIFFs) with Rasterio According to Cogeo.org: A Cloud Opdtimized GeoTIFF (COG) is a regular GeoTIFF file, aimed at
 8 Jul 29, 2022
8 Jul 29, 2022

Deep Learning for 3D Point Clouds: A Survey (IEEE TPAMI, 2020)
🔥Deep Learning for 3D Point Clouds (IEEE TPAMI, 2020)
 1.4k Jan 8, 2023
1.4k Jan 8, 2023
pyntcloud is a Python library for working with 3D point clouds.
pyntcloud is a Python library for working with 3D point clouds.
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

The official implementation of ICCV paper "Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds".
Box-Aware Tracker (BAT) Pytorch-Lightning implementation of the Box-Aware Tracker. Box-Aware Feature Enhancement for Single Object Tracking on Point C
 5 Mar 26, 2022
5 Mar 26, 2022
A Bot to Upload files to Many Cloud services. Powered by Telethon.
oVo MultiUpload V1.0 👀 A Bot to Upload files to Many Cloud services. Powered by Telethon _ 🎯 Follow me and star this repo for more telegram bots. @H
 32 Dec 30, 2022
32 Dec 30, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal Action Localization' (ICCV-21 Oral)
Learning-Action-Completeness-from-Points Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal A
 67 Jan 3, 2023
67 Jan 3, 2023
Pip-package for trajectory benchmarking from "Be your own Benchmark: No-Reference Trajectory Metric on Registered Point Clouds", ECMR'21
Map Metrics for Trajectory Quality Map metrics toolkit provides a set of metrics to quantitatively evaluate trajectory quality via estimating consiste
 31 Oct 28, 2022
31 Oct 28, 2022

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 2, 2022
22 Dec 2, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022
从flomo导出的笔记中生成词云
flomo-word-cloud 从flomo导出的笔记中生成词云 如何使用? 将本项目克隆到你的电脑上,使用如下的命令,安装所需python库 pip install -r requirements.txt 在项目里新建一个file文件夹,把所有从flomo导出的html文件放入其中 运行main
 9 Dec 30, 2022
9 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022
Nasdaq Cloud Data Service (NCDS) provides a modern and efficient method of delivery for realtime exchange data and other financial information. This repository provides an SDK for developing applications to access the NCDS.
Nasdaq Cloud Data Service (NCDS) Nasdaq Cloud Data Service (NCDS) provides a modern and efficient method of delivery for realtime exchange data and ot
 8 Dec 1, 2022
8 Dec 1, 2022

This is the official code of our paper "Diversity-based Trajectory and Goal Selection with Hindsight Experience Relay" (PRICAI 2021)
Diversity-based Trajectory and Goal Selection with Hindsight Experience Replay This is the official implementation of our paper "Diversity-based Traje
 6 Jul 18, 2022
6 Jul 18, 2022
一个基于Python3的Bot。目前支持以Docker的方式部署在vps上。支持Aria2、本子下载、网易云音乐下载、Pixiv榜单下载、Youtue-dl支持、搜图。
介绍 一个基于Python3的Bot。目前支持以Docker的方式部署在vps上。 主要功能: 文件管理 修改主界面为 filebrowser,账号为admin,密码为admin,主界面路径:http://ip:port,请自行修改密码 FolderMagic自带的webdav:路径:http://
 650 Jan 8, 2023
650 Jan 8, 2023
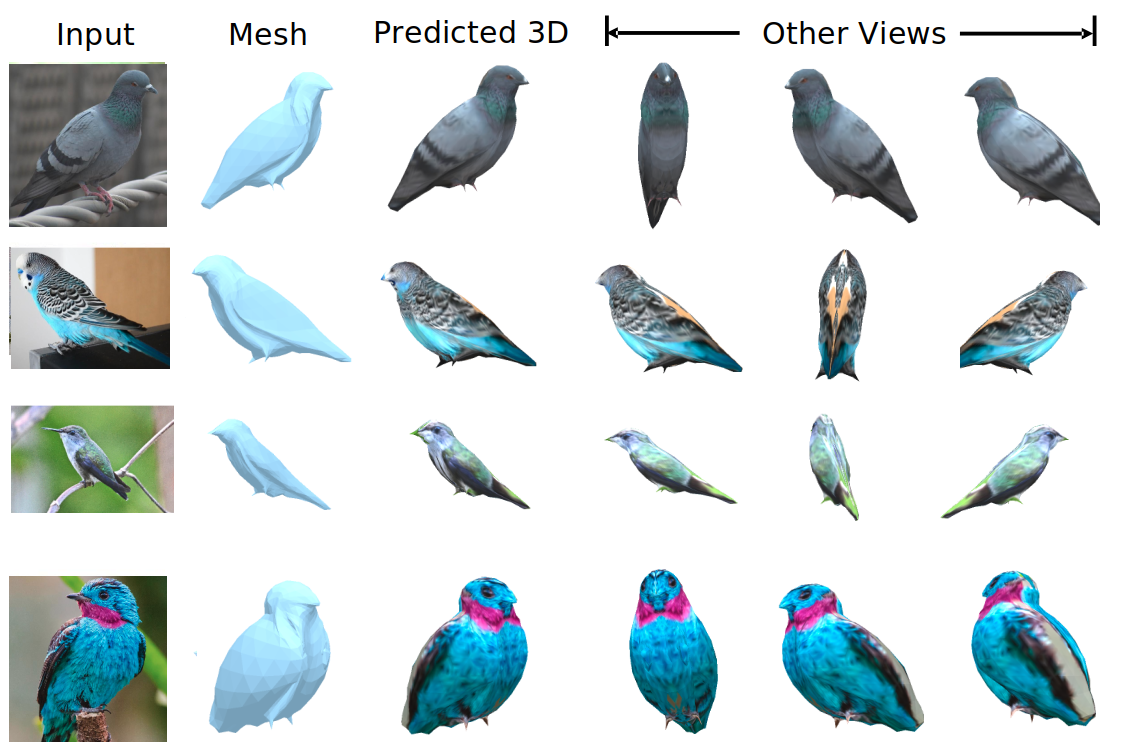
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Ditch Xiaomi's cloud and use a Telegram bot instead
Yi-Home_Telegram_Bot_Interface Ditch Xiaomi's cloud and use a Telegram bot instead Features Motion detection Works by monitoring a tmp file that is cr
 10 Aug 18, 2022
10 Aug 18, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
 27 Dec 15, 2022
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

RESTler is the first stateful REST API fuzzing tool for automatically testing cloud services through their REST APIs and finding security and reliability bugs in these services.
RESTler is the first stateful REST API fuzzing tool for automatically testing cloud services through their REST APIs and finding security and reliability bugs in these services.
 1.8k Jan 4, 2023
1.8k Jan 4, 2023

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022

Visius Heimdall is a tool that checks for risks on your cloud infrastructure
Heimdall Cloud Checker 🇧🇷 About Visius is a Brazilian cybersecurity startup that follows the signs of the crimson thunder ;) 🎸 ! As we value open s
 48 Jun 20, 2022
48 Jun 20, 2022
WILSON Cloud Respwnder is a Web Interaction Logger Sending Out Notifications with the ability to serve custom content in order to appropriately respond to client-issued requests.
WILSON Cloud Respwnder What is this? WILSON Cloud Respwnder is a Web Interaction Logger Sending Out Notifications (WILSON) with the ability to serve c
 48 Oct 31, 2022
48 Oct 31, 2022
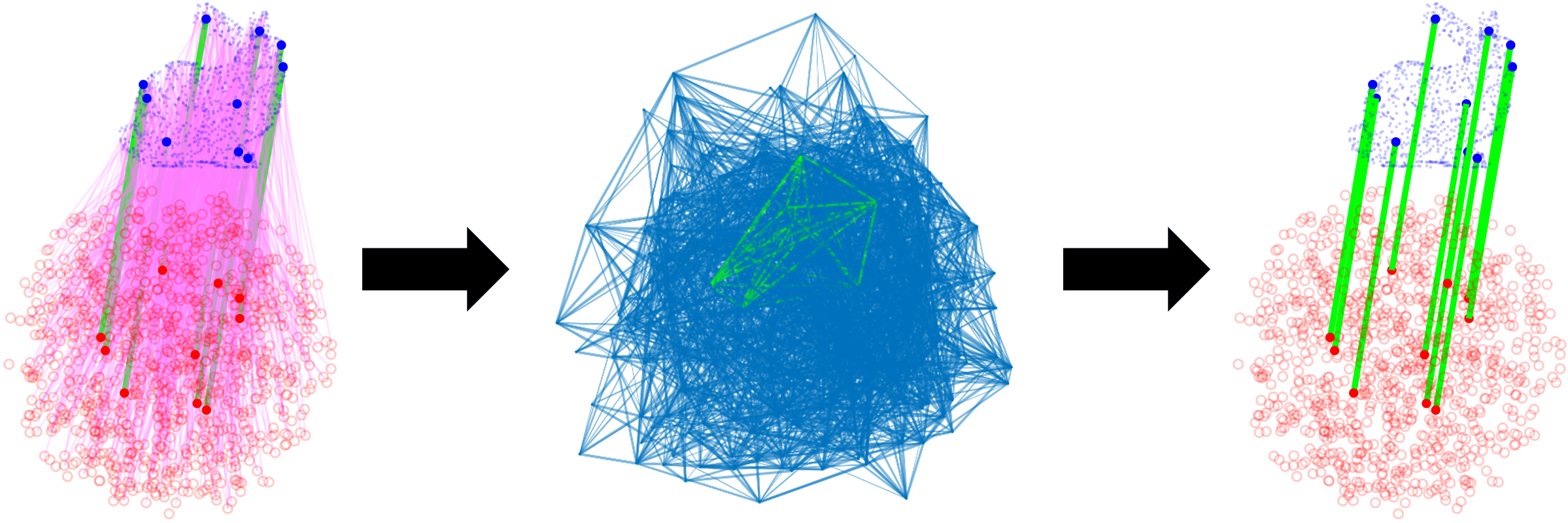
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
90 Dec 29, 2022

Azure Cloud Advocates at Microsoft are pleased to offer a 12-week, 24-lesson curriculum all about Machine Learning
Azure Cloud Advocates at Microsoft are pleased to offer a 12-week, 24-lesson curriculum all about Machine Learning
43.4k Jan 4, 2023

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

Udacity Suse Cloud Native Foundations Scholarship Course Walkthrough
SUSE Cloud Native Foundations Scholarship Udacity is collaborating with SUSE, a global leader in true open source solutions, to empower developers and
 34 Oct 18, 2022
34 Oct 18, 2022

Splunk Add-On to collect audit log events from Github Enterprise Cloud
GitHub Enterprise Audit Log Monitoring Splunk modular input plugin to fetch the enterprise audit log from GitHub Enterprise Support for modular inputs
 12 Aug 18, 2022
12 Aug 18, 2022

This repo is a PyTorch implementation for Paper "Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds"
Unsupervised Learning for Cuboid Shape Abstraction via Joint Segmentation from Point Clouds This repository is a PyTorch implementation for paper: Uns
 42 Dec 9, 2022
42 Dec 9, 2022

CloudProxy is to hide your scrapers IP behind the cloud
Hide your scrapers IP behind the cloud. Provision proxy servers across different cloud providers to improve your scraping success.
 1.1k Jan 2, 2023
1.1k Jan 2, 2023
A repository containing useful resources needed to complete the SUSE Scholarship Challenge #UdacitySUSEScholars #poweredbySUSE
SUSE-udacity-cloud-native-scholarship A repository containing useful resources needed to complete the SUSE Scholarship Challenge #UdacitySUSEScholars
 11 Dec 2, 2021
11 Dec 2, 2021
A python to scratch API connector. Can fetch data from the API and send it back in cloud variables.
Scratch2py Scratch2py or S2py is a easy to use, versatile tool to communicate with the Scratch API Based of scratchclient by Raihan142857 Installation
 20 Jun 18, 2022
20 Jun 18, 2022

Code for "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" @ICRA2021
CloudAAE This is an tensorflow implementation of "CloudAAE: Learning 6D Object Pose Regression with On-line Data Synthesis on Point Clouds" Files log:
 35 Nov 14, 2022
35 Nov 14, 2022

Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020)
GraspNet Baseline Baseline model for "GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping" (CVPR 2020). [paper] [dataset] [API] [do
 209 Dec 29, 2022
209 Dec 29, 2022
A new GCN model for Point Cloud Analyse
Pytorch Implementation of PointNet and PointNet++ This repo is implementation for VA-GCN in pytorch. Classification (ModelNet10/40) Data Preparation D
 12 Feb 2, 2022
12 Feb 2, 2022

Official Code for ICML 2021 paper "Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline"
Revisiting Point Cloud Shape Classification with a Simple and Effective Baseline Ankit Goyal, Hei Law, Bowei Liu, Alejandro Newell, Jia Deng Internati
 115 Jan 4, 2023
115 Jan 4, 2023
A Python package for floating-point binary fractions. Do math in base 2!
An implementation of a floating-point binary fractions class and module in Python. Work with binary fractions and binary floats with ease!
 10 Oct 29, 2022
10 Oct 29, 2022
Jina allows you to build deep learning-powered search-as-a-service in just minutes
Cloud-native neural search framework for any kind of data
 17k Dec 31, 2022
17k Dec 31, 2022

Cloud Native sample microservices showcasing Full Stack Observability using AppDynamics and ThousandEyes
Cloud Native Sample Bookinfo App Observability Bookinfo is a sample application composed of four Microservices written in different languages.
 13 Jul 21, 2022
13 Jul 21, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

A comprehensive reference for all topics related to building and maintaining microservices
This pandect (πανδέκτης is Ancient Greek for encyclopedia) was created to help you find and understand almost anything related to Microservices that i
 64 Dec 9, 2022
64 Dec 9, 2022

Implementation of the "Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos" paper.
Point 4D Transformer Networks for Spatio-Temporal Modeling in Point Cloud Videos Introduction Point cloud videos exhibit irregularities and lack of or
 101 Dec 29, 2022
101 Dec 29, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

HNECV: Heterogeneous Network Embedding via Cloud model and Variational inference
HNECV This repository provides a reference implementation of HNECV as described in the paper: HNECV: Heterogeneous Network Embedding via Cloud model a
 4 Jun 28, 2022
4 Jun 28, 2022

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023

3D AffordanceNet is a 3D point cloud benchmark consisting of 23k shapes from 23 semantic object categories, annotated with 56k affordance annotations and covering 18 visual affordance categories.
3D AffordanceNet This repository is the official experiment implementation of 3D AffordanceNet benchmark. 3D AffordanceNet is a 3D point cloud benchma
 49 Dec 1, 2022
49 Dec 1, 2022

Registration Loss Learning for Deep Probabilistic Point Set Registration
RLLReg This repository contains a Pytorch implementation of the point set registration method RLLReg. Details about the method can be found in the 3DV
 35 Nov 2, 2022
35 Nov 2, 2022

Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving
SalsaNext: Fast, Uncertainty-aware Semantic Segmentation of LiDAR Point Clouds for Autonomous Driving Abstract In this paper, we introduce SalsaNext f
 308 Jan 4, 2023
308 Jan 4, 2023
Orchest is a browser based IDE for Data Science.
Orchest is a browser based IDE for Data Science. It integrates your favorite Data Science tools out of the box, so you don’t have to. The application is easy to use and can run on your laptop as well as on a large scale cloud cluster.
 3.6k Jan 9, 2023
3.6k Jan 9, 2023
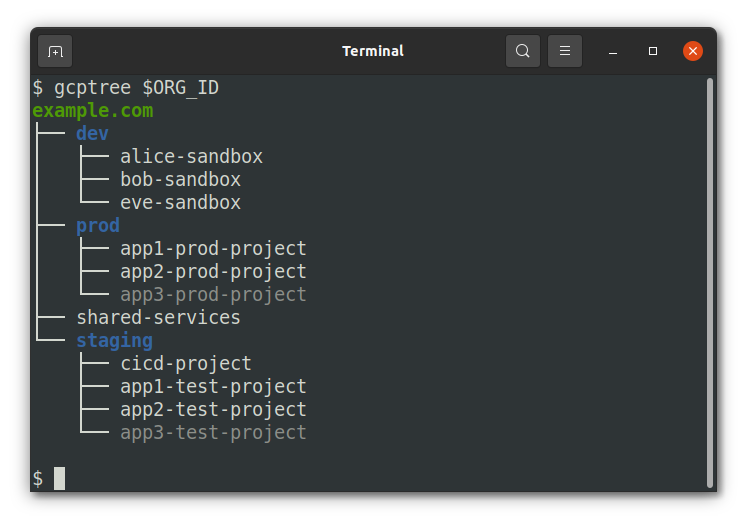
gcptree - Like the unix tree command but for GCP Org Heirarchy
gcptree Like the unix tree command but for GCP Org Heirarchy. For a note on coloring, the org node is green, folders and blue, and projects that are n
 25 Sep 6, 2022
25 Sep 6, 2022
source code the paper Fast and Robust Iterative Closet Point.
Fast-Robust-ICP This repository includes the source code the paper Fast and Robust Iterative Closet Point. Authors: Juyong Zhang, Yuxin Yao, Bailin De
 320 Dec 28, 2022
320 Dec 28, 2022

Cloud-native, data onboarding architecture for the Google Cloud Public Datasets program
Public Datasets Pipelines Cloud-native, data pipeline architecture for onboarding datasets to the Google Cloud Public Datasets Program. Overview Requi
109 Dec 30, 2022
Accompanying code for our paper "Point Cloud Audio Processing"
Point Cloud Audio Processing Krishna Subramani1, Paris Smaragdis1 1UIUC Paper For the necessary libraries/prerequisites, please use conda/anaconda to
 17 Nov 17, 2022
17 Nov 17, 2022

This is a repository for the Duke University Cloud Computing course project on Serveless Data Engineering Pipeline. For this project, I recreated the below pipeline.
AWS Data Engineering Pipeline This is a repository for the Duke University Cloud Computing course project on Serverless Data Engineering Pipeline. For
 15 Jul 28, 2021
15 Jul 28, 2021
Stream Framework is a Python library, which allows you to build news feed, activity streams and notification systems using Cassandra and/or Redis. The authors of Stream-Framework also provide a cloud service for feed technology:
Stream Framework Activity Streams & Newsfeeds Stream Framework is a Python library which allows you to build activity streams & newsfeeds using Cassan
 4.7k Jan 2, 2023
4.7k Jan 2, 2023

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022
Deep Compression for Dense Point Cloud Maps.
DEPOCO This repository implements the algorithms described in our paper Deep Compression for Dense Point Cloud Maps. How to get started (using Docker)
67 Dec 6, 2022