562 Repositories
Python point-level-supervision Libraries

Score-Based Point Cloud Denoising (ICCV'21)
Score-Based Point Cloud Denoising (ICCV'21) [Paper] https://arxiv.org/abs/2107.10981 Installation Recommended Environment The code has been tested in
 79 Dec 26, 2022
79 Dec 26, 2022

Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds DLO is a lightweight and computationally-efficient frontend LiDAR odometry solution w
 369 Dec 30, 2022
369 Dec 30, 2022
The official repository for "Score Transformer: Generating Musical Scores from Note-level Representation" (MMAsia '21)
Score Transformer This is the official repository for "Score Transformer": Score Transformer: Generating Musical Scores from Note-level Representation
 22 Dec 22, 2022
22 Dec 22, 2022
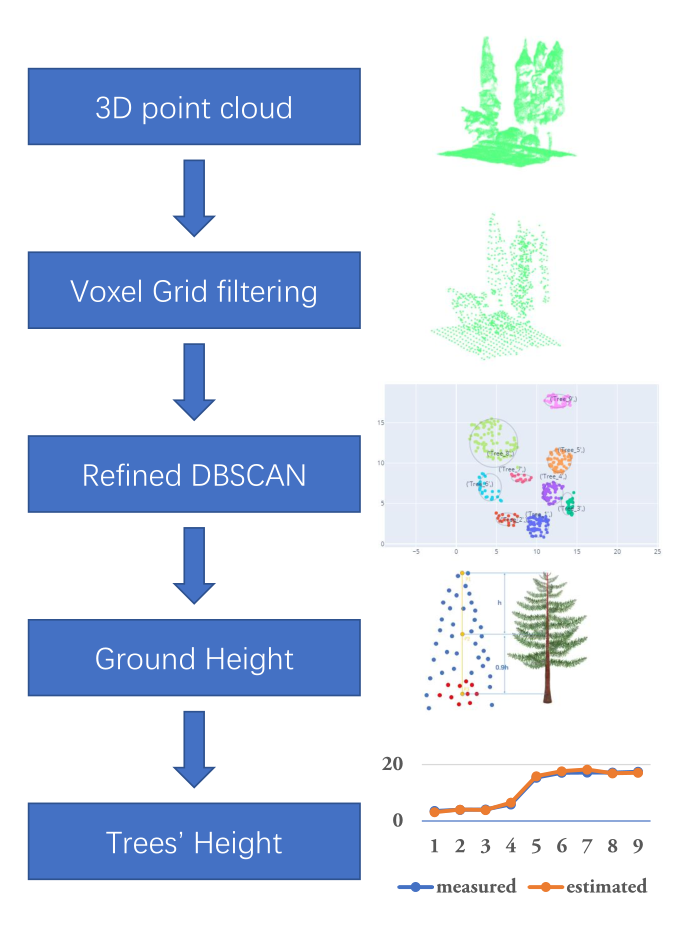
A simple algorithm for extracting tree height in sparse scene from point cloud data.
TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING This is the offical python implementation of the paper "Tree Height Extraction in
 6 Oct 28, 2022
6 Oct 28, 2022
Implementation of "Unsupervised Domain Adaptive 3D Detection with Multi-Level Consistency"
Unsupervised Domain Adaptive 3D Detection with Multi-Level Consistency (ICCV2021) Paper Link: https://arxiv.org/abs/2107.11355 This implementation bui
 32 Nov 17, 2022
32 Nov 17, 2022
Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
XDR Tuner Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
 16 Dec 28, 2022
16 Dec 28, 2022
Code and pre-trained models for "ReasonBert: Pre-trained to Reason with Distant Supervision", EMNLP'2021
ReasonBERT Code and pre-trained models for ReasonBert: Pre-trained to Reason with Distant Supervision, EMNLP'2021 Pretrained Models The pretrained mod
 29 Dec 19, 2022
29 Dec 19, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022

An Implicit Function Theorem (IFT) optimizer for bi-level optimizations
iftopt An Implicit Function Theorem (IFT) optimizer for bi-level optimizations. Requirements Python 3.7+ PyTorch 1.x Installation $ pip install git+ht
 2 Dec 2, 2021
2 Dec 2, 2021
A robust, low-level connector for the Discord API
Bauxite Bauxite is a robust, low-level connector for the Discord API. What is Bauxite for? Bauxite is made for two main purposes: Creating higher-leve
 1 Dec 4, 2021
1 Dec 4, 2021

A simple image-level annotation tool supporting multi-channel images for napari.
napari-labelimg4classification A simple image-level annotation tool supporting multi-channel images for napari. This napari plugin was generated with
 4 May 16, 2022
4 May 16, 2022

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
 957 Dec 21, 2022
957 Dec 21, 2022
Line-level Handwritten Text Recognition (HTR) system implemented with TensorFlow.
Line-level Handwritten Text Recognition with TensorFlow This model is an extended version of the Simple HTR system implemented by @Harald Scheidl and
 72 May 7, 2022
72 May 7, 2022

Official implementation of Representer Point Selection via Local Jacobian Expansion for Post-hoc Classifier Explanation of Deep Neural Networks and Ensemble Models at NeurIPS 2021
Representer Point Selection via Local Jacobian Expansion for Classifier Explanation of Deep Neural Networks and Ensemble Models This repository is the
 2 Dec 1, 2021
2 Dec 1, 2021

Official implementation of Pixel-Level Bijective Matching for Video Object Segmentation
BMVOS This is the official implementation of Pixel-Level Bijective Matching for Video Object Segmentation, to appear in WACV 2022. @article{cho2021pix
 13 Dec 14, 2022
13 Dec 14, 2022
Collection of Beginner to Intermediate level Python scripts contributed by members and participants.
Hacktoberfest2021-Python Hello there! This repository contains a 'Collection of Beginner to Intermediate level Python projects', created specially for
 12 May 25, 2022
12 May 25, 2022
This is the face keypoint train code of project face-detection-project
face-key-point-pytorch 1. Data structure The structure of landmarks_jpg is like below: |--landmarks_jpg |----AFW |------AFW_134212_1_0.jpg |------AFW_
 3 Nov 27, 2022
3 Nov 27, 2022
Code of our paper "Contrastive Object-level Pre-training with Spatial Noise Curriculum Learning"
CCOP Code of our paper Contrastive Object-level Pre-training with Spatial Noise Curriculum Learning Requirement Install OpenSelfSup Install Detectron2
 5 Nov 30, 2021
5 Nov 30, 2021

Pre-Training 3D Point Cloud Transformers with Masked Point Modeling
Point-BERT: Pre-Training 3D Point Cloud Transformers with Masked Point Modeling Created by Xumin Yu*, Lulu Tang*, Yongming Rao*, Tiejun Huang, Jie Zho
 306 Jan 6, 2023
306 Jan 6, 2023
PyTorch implementation of Pointnet2/Pointnet++
Pointnet2/Pointnet++ PyTorch Project Status: Unmaintained. Due to finite time, I have no plans to update this code and I will not be responding to iss
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
Code of our paper "Contrastive Object-level Pre-training with Spatial Noise Curriculum Learning"
CCOP Code of our paper Contrastive Object-level Pre-training with Spatial Noise Curriculum Learning Requirement Install OpenSelfSup Install Detectron2
21 Dec 13, 2022

Background-Click Supervision for Temporal Action Localization
Background-Click Supervision for Temporal Action Localization This repository is the official implementation of BackTAL. In this work, we study the te
 221 Oct 9, 2022
221 Oct 9, 2022
Low-level Python CFFI Bindings for Argon2
Low-level Python CFFI Bindings for Argon2 argon2-cffi-bindings provides low-level CFFI bindings to the Argon2 password hashing algorithm including a v
 4 Dec 15, 2022
4 Dec 15, 2022

Official Pytorch Code for the paper TransWeather
TransWeather Official Code for the paper TransWeather, Arxiv Tech Report 2021 Paper | Website About this repo: This repo hosts the implentation code,
 81 Dec 30, 2022
81 Dec 30, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

SwinIR: Image Restoration Using Swin Transformer
SwinIR: Image Restoration Using Swin Transformer This repository is the official PyTorch implementation of SwinIR: Image Restoration Using Shifted Win
 2.4k Jan 5, 2023
2.4k Jan 5, 2023

Kernel Point Convolutions
Created by Hugues THOMAS Introduction Update 27/04/2020: New PyTorch implementation available. With SemanticKitti, and Windows supported. This reposit
 584 Jan 7, 2023
584 Jan 7, 2023

PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud, CVPR 2019.
PointRCNN PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud Code release for the paper PointRCNN:3D Object Proposal Generation a
 1.5k Dec 27, 2022
1.5k Dec 27, 2022
An unofficial implementation of "Unpaired Image Super-Resolution using Pseudo-Supervision." CVPR2020
UnpairedSR An unofficial implementation of "Unpaired Image Super-Resolution using Pseudo-Supervision." CVPR2020 turn RCAN(modified) -- xmodel(xilinx
 10 Oct 28, 2022
10 Oct 28, 2022
Project under the certification "Data Analysis with Python" on FreeCodeCamp
Sea Level Predictor Assignment You will anaylize a dataset of the global average sea level change since 1880. You will use the data to predict the sea
 3 Jan 31, 2022
3 Jan 31, 2022

Learning Pixel-level Semantic Affinity with Image-level Supervision for Weakly Supervised Semantic Segmentation, CVPR 2018
Learning Pixel-level Semantic Affinity with Image-level Supervision This code is deprecated. Please see https://github.com/jiwoon-ahn/irn instead. Int
 337 Dec 15, 2022
337 Dec 15, 2022

This is a Saleae Logic custom high level analyzer that allows you to search and mark specific packets.
SaleaePacketParser This is a Saleae Logic custom high level analyzer that allows you to search and mark specific packets. Field "Search For" is used f
 1 Dec 16, 2021
1 Dec 16, 2021

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
 3.2k Dec 31, 2022
3.2k Dec 31, 2022
GUI for TOAD-GAN, a PCG-ML algorithm for Token-based Super Mario Bros. Levels.
If you are using this code in your own project, please cite our paper: @inproceedings{awiszus2020toadgan, title={TOAD-GAN: Coherent Style Level Gene
 13 Dec 14, 2022
13 Dec 14, 2022
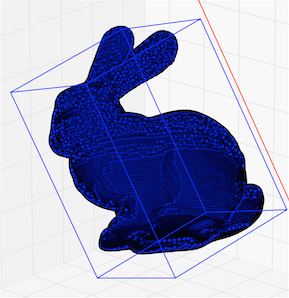
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
ApproxMVBB Status Build UnitTests Homepage Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in
 390 Dec 31, 2022
390 Dec 31, 2022
Spatial Sparse Convolution Library
SpConv: Spatially Sparse Convolution Library PyPI Install Downloads CPU (Linux Only) pip install spconv CUDA 10.2 pip install spconv-cu102 CUDA 11.1 p
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

Point Cloud Registration Network
PCRNet: Point Cloud Registration Network using PointNet Encoding Source Code Author: Vinit Sarode and Xueqian Li Paper | Website | Video | Pytorch Imp
 59 Nov 19, 2022
59 Nov 19, 2022

Source code for Fixed-Point GAN for Cloud Detection
FCD: Fixed-Point GAN for Cloud Detection PyTorch source code of Nyborg & Assent (2020). Abstract The detection of clouds in satellite images is an ess
 8 Dec 22, 2022
8 Dec 22, 2022

Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
 29 Nov 25, 2021
29 Nov 25, 2021

Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes
Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes [Paper] Method overview 4DMatch Benchmark 4DMatch is a benchmark for matc
 103 Jan 6, 2023
103 Jan 6, 2023

Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion". Paper link: https://arxiv.org/abs/2111.10
 10 Nov 24, 2021
10 Nov 24, 2021

A hybrid SOTA solution of LiDAR panoptic segmentation with C++ implementations of point cloud clustering algorithms. ICCV21, Workshop on Traditional Computer Vision in the Age of Deep Learning
ICCVW21-TradiCV-Survey-of-LiDAR-Cluster Motivation In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a
 103 Nov 22, 2022
103 Nov 22, 2022

Learning Logic Rules for Document-Level Relation Extraction
LogiRE Learning Logic Rules for Document-Level Relation Extraction We propose to introduce logic rules to tackle the challenges of doc-level RE. Equip
 41 Dec 26, 2022
41 Dec 26, 2022

NeurIPS 2021, self-supervised 6D pose on category level
SE(3)-eSCOPE video | paper | website Leveraging SE(3) Equivariance for Self-Supervised Category-Level Object Pose Estimation Xiaolong Li, Yijia Weng,
 63 Nov 22, 2022
63 Nov 22, 2022
Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
93 Dec 15, 2022
Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS)
This repository contains tools to simulate the ground filtering process of a registered point cloud. The repository contains two filtering methods. The first method uses a normal vector, and fit to plane. The second method utilizes voxel adjacency, and fit to plane.
 5 Aug 25, 2022
5 Aug 25, 2022

The Web Application Firewall Paranoia Level Test Tool.
Quick WAF "paranoid" Doctor Evaluation WAFPARAN01D3 The Web Application Firewall Paranoia Level Test Tool. — From alt3kx.github.io Introduction to Par
 22 Jul 25, 2022
22 Jul 25, 2022
cleanlab is the data-centric ML ops package for machine learning with noisy labels.
cleanlab is the data-centric ML ops package for machine learning with noisy labels. cleanlab cleans labels and supports finding, quantifying, and lear
 51 Nov 28, 2022
51 Nov 28, 2022
A little tool that uses LLVM to extract simple "what does this do" level instruction information from all architectures.
moirai: MOre InstRuctions and Information Backcronym. Anyway, this is a small project to extract useful instruction definitions from LLVM's platform d
 2 Jul 30, 2022
2 Jul 30, 2022

PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018
PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place
 294 Dec 12, 2022
294 Dec 12, 2022
A high-level plotting API for pandas, dask, xarray, and networkx built on HoloViews
hvPlot A high-level plotting API for the PyData ecosystem built on HoloViews. Build Status Coverage Latest dev release Latest release Docs What is it?
 694 Jan 4, 2023
694 Jan 4, 2023

Ultra-lightweight human body posture key point CNN model. ModelSize:2.3MB HUAWEI P40 NCNN benchmark: 6ms/img,
Ultralight-SimplePose Support NCNN mobile terminal deployment Based on MXNET(=1.5.1) GLUON(=0.7.0) framework Top-down strategy: The input image is t
 223 Dec 27, 2022
223 Dec 27, 2022
Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion" Coming soon, as soon as I finish a
14 Feb 26, 2022
CertPy is a high level toolkit for generating x509 (e.g. SSL/TLS/HTTPS) certificates in Python.
CertPy CertPy is a high level toolkit for generating x509 (e.g. SSL/TLS/HTTPS) certificates in Python. Certificate “profiles” are implemented as Pytho
 4 Feb 21, 2022
4 Feb 21, 2022
Analyse japanese ebooks using MeCab to determine the difficulty level for japanese learners
japanese-ebook-analysis This aim of this project is to make analysing the contents of a japanese ebook easy and streamline the process for non-technic
 14 Jul 23, 2022
14 Jul 23, 2022

Some method of processing point cloud
Point-Cloud Some method of processing point cloud inversion the completion pointcloud to incomplete point cloud Some model of encoding point cloud to
 1 Nov 19, 2021
1 Nov 19, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
 11 Dec 9, 2022
11 Dec 9, 2022

Improving Transferability of Representations via Augmentation-Aware Self-Supervision
Improving Transferability of Representations via Augmentation-Aware Self-Supervision Accepted to NeurIPS 2021 TL;DR: Learning augmentation-aware infor
 16 Nov 20, 2021
16 Nov 20, 2021

RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation
RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation Anonymous submission Abstract 3D obj
 30 Sep 16, 2022
30 Sep 16, 2022
Unofficial implementation of Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segmentation
Point-Unet This is an unofficial implementation of the MICCAI 2021 paper Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segment
 9 Dec 7, 2022
9 Dec 7, 2022

Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks
Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks This is a Pytorch-Lightning implementation of the paper "Self-s
111 Dec 6, 2022
The next level Python obfuscator, nearly impossible to deobfuscate.
🐸 Kramer 🐸 Kramer is a next level obfuscation tool written in Python3 allowing you to obfuscate your Python3 code easily and securely. It uses Berse
 114 Dec 26, 2022
114 Dec 26, 2022
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom. Also, rasterize shapefile vectors as corresponding label image.
 2 Nov 22, 2021
2 Nov 22, 2021

This is simple maker for level card in discord bot.
mariocard This is simple maker for level card in discord bot in discord.py or pycord. Installing Python 3.8 or higher is required # Linux/macOS pip3 i
 3 Jan 29, 2022
3 Jan 29, 2022

A torch implementation of "Pixel-Level Domain Transfer"
Pixel Level Domain Transfer A torch implementation of "Pixel-Level Domain Transfer". based on dcgan.torch. Dataset The dataset used is "LookBook", fro
 260 Sep 2, 2022
260 Sep 2, 2022

Object detection, 3D detection, and pose estimation using center point detection:
Objects as Points Object detection, 3D detection, and pose estimation using center point detection: Objects as Points, Xingyi Zhou, Dequan Wang, Phili
 6.7k Jan 3, 2023
6.7k Jan 3, 2023

PyTorch Code for "Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning"
Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning [Project Page] [Paper] Wenlong Huang1, Igor Mordatch2, Pieter Abbeel1,
 40 Nov 22, 2022
40 Nov 22, 2022

Single-stage Keypoint-based Category-level Object Pose Estimation from an RGB Image
CenterPose Overview This repository is the official implementation of the paper "Single-stage Keypoint-based Category-level Object Pose Estimation fro
 188 Dec 27, 2022
188 Dec 27, 2022

PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages
PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages Abstract NLP applications for code-mixed (CM) or mix-li
 1 Nov 12, 2021
1 Nov 12, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
11 Dec 9, 2022
Point detection through multi-instance deep heatmap regression for sutures in endoscopy
Suture detection PyTorch This repo contains the reference implementation of suture detection model in PyTorch for the paper Point detection through mu
 3 Jul 16, 2022
3 Jul 16, 2022
PSANet: Point-wise Spatial Attention Network for Scene Parsing, ECCV2018.
PSANet: Point-wise Spatial Attention Network for Scene Parsing (in construction) by Hengshuang Zhao*, Yi Zhang*, Shu Liu, Jianping Shi, Chen Change Lo
 217 Oct 30, 2022
217 Oct 30, 2022
The repository contains source code and models to use PixelNet architecture used for various pixel-level tasks. More details can be accessed at http://www.cs.cmu.edu/~aayushb/pixelNet/.
PixelNet: Representation of the pixels, by the pixels, and for the pixels. We explore design principles for general pixel-level prediction problems, f
 196 Aug 10, 2022
196 Aug 10, 2022
![Models Supported: AlbUNet [18, 34, 50, 101, 152] (1D and 2D versions for Single and Multiclass Segmentation, Feature Extraction with supports for Deep Supervision and Guided Attention)](https://github.com/Sakib1263/AlbUNet-1D-2D-Tensorflow-Keras/raw/main/Documents/Images/AlbuNet.png)
Models Supported: AlbUNet [18, 34, 50, 101, 152] (1D and 2D versions for Single and Multiclass Segmentation, Feature Extraction with supports for Deep Supervision and Guided Attention)
AlbUNet-1D-2D-Tensorflow-Keras This repository contains 1D and 2D Signal Segmentation Model Builder for AlbUNet and several of its variants developed
 1 Nov 15, 2021
1 Nov 15, 2021

TensorLight - A high-level framework for TensorFlow
TensorLight is a high-level framework for TensorFlow-based machine intelligence applications. It reduces boilerplate code and enables advanced feature
 10 Jul 31, 2022
10 Jul 31, 2022
Weakly Supervised 3D Object Detection from Point Cloud with Only Image Level Annotation
SCCKTIM Weakly Supervised 3D Object Detection from Point Cloud with Only Image-Level Annotation Our code will be available soon. The class knowledge t
 1 Nov 12, 2021
1 Nov 12, 2021
Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation".
FPS-Net Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation", accepted by ISPRS journal of Photogrammetry
 15 Nov 30, 2022
15 Nov 30, 2022
In this project, we are going to display the battery notification and the time left for the battery to drain out using the battery capacity value.
In this project, we are going to display the battery notification and the time left for the battery to drain out using the battery capacity value.
 1 Dec 20, 2021
1 Dec 20, 2021
Computationally efficient algorithm that identifies boundary points of a point cloud.
BoundaryTest Included are MATLAB and Python packages, each of which implement efficient algorithms for boundary detection and normal vector estimation
 6 Dec 9, 2022
6 Dec 9, 2022
EEGEyeNet is benchmark to evaluate ET prediction based on EEG measurements with an increasing level of difficulty
Introduction EEGEyeNet EEGEyeNet is a benchmark to evaluate ET prediction based on EEG measurements with an increasing level of difficulty. Overview T
 23 Dec 22, 2022
23 Dec 22, 2022
6D Grasping Policy for Point Clouds
GA-DDPG [website, paper] Installation git clone https://github.com/liruiw/GA-DDPG.git --recursive Setup: Ubuntu 16.04 or above, CUDA 10.0 or above, py
 48 Dec 21, 2022
48 Dec 21, 2022
ANEA: Distant Supervision for Low-Resource Named Entity Recognition
ANEA: Distant Supervision for Low-Resource Named Entity Recognition ANEA is a tool to automatically annotate named entities in unlabeled text based on
 15 Mar 30, 2022
15 Mar 30, 2022
Turn crypto miner on/off depending on powerwall charge level
Mining Crypto with Tesla Solar and Powerwalls This script turns a crypto miner on and off when the Tesla Powerwall level drops/rises above a certain t
 1 Nov 9, 2021
1 Nov 9, 2021
A high-level framework for building GitHub applications in Python.
A high-level framework for building GitHub applications in Python. Core Features Async Proper ratelimit handling Handles interactions for you (
 3 Apr 12, 2022
3 Apr 12, 2022
![[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration](https://github.com/ispc-lab/HRegNet/raw/main/assets/overall.png)
[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration Introduction The repository contains the source code and pre-tr
 55 Dec 14, 2022
55 Dec 14, 2022

Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (ICCV 2021)
Exploring Simple 3D Multi-Object Tracking for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Exploring Simple 3D Multi-Object Tracking for
 141 Nov 21, 2022
141 Nov 21, 2022
![[ICCV' 21]](https://github.com/hansen7/OcCo/raw/master/assets/teaser.png)
[ICCV' 21] "Unsupervised Point Cloud Pre-training via Occlusion Completion"
OcCo: Unsupervised Point Cloud Pre-training via Occlusion Completion This repository is the official implementation of paper: "Unsupervised Point Clou
 204 Dec 24, 2022
204 Dec 24, 2022
A wrapper for webdriver that is a jumping off point for web automation.
Webdriver Automation Plus ===================================== Description: Tests the user can save messages then find them in search and Saved items
 1 Nov 8, 2021
1 Nov 8, 2021

It's a implement of this paper:Relation extraction via Multi-Level attention CNNs
Relation Classification via Multi-Level Attention CNNs It's a implement of this paper:Relation Classification via Multi-Level Attention CNNs. Training
 2 Nov 4, 2022
2 Nov 4, 2022
[ICML'21] Estimate the accuracy of the classifier in various environments through self-supervision
What Does Rotation Prediction Tell Us about Classifier Accuracy under Varying Testing Environments? [Paper] [ICML'21 Project] PyTorch Implementation T
 24 Oct 26, 2022
24 Oct 26, 2022

Codes for CVPR2021 paper "PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization"
PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization (CVPR 2021) This is the official implementation of PW
 42 Dec 18, 2022
42 Dec 18, 2022

PyTorch implementation of "PatchGame: Learning to Signal Mid-level Patches in Referential Games" to appear in NeurIPS 2021
PatchGame: Learning to Signal Mid-level Patches in Referential Games This repository is the official implementation of the paper - "PatchGame: Learnin
 9 Nov 4, 2021
9 Nov 4, 2021

Official implementation of Generalized Data Weighting via Class-level Gradient Manipulation (NeurIPS 2021).
Generalized Data Weighting via Class-level Gradient Manipulation This repository is the official implementation of Generalized Data Weighting via Clas
 9 Nov 3, 2021
9 Nov 3, 2021
Automatically re-open threads when they get archived, no matter your boost level!
ThreadPersist Automatically re-open threads when they get archived, no matter your boost level! Installation You will need to install poetry to run th
 7 Sep 18, 2022
7 Sep 18, 2022
Generalized Data Weighting via Class-level Gradient Manipulation
Generalized Data Weighting via Class-level Gradient Manipulation This repository is the official implementation of Generalized Data Weighting via Clas
18 Nov 12, 2022
code for Fast Point Cloud Registration with Optimal Transport
robot This is the repository for the paper "Accurate Point Cloud Registration with Robust Optimal Transport". We are in the process of refactoring the
 28 Jan 4, 2023
28 Jan 4, 2023
PyTorch implementation of "PatchGame: Learning to Signal Mid-level Patches in Referential Games" to appear in NeurIPS 2021
PatchGame: Learning to Signal Mid-level Patches in Referential Games This repository is the official implementation of the paper - "PatchGame: Learnin
22 Mar 16, 2022

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
![DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]](https://github.com/ai4ce/DiscoNet/raw/main/img.png)
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021] Yiming Li, Shunli Ren, Pengxiang Wu, Siheng Chen, Chen Feng
 98 Dec 21, 2022
98 Dec 21, 2022

Implementation of our NeurIPS 2021 paper "A Bi-Level Framework for Learning to Solve Combinatorial Optimization on Graphs".
PPO-BiHyb This is the official implementation of our NeurIPS 2021 paper "A Bi-Level Framework for Learning to Solve Combinatorial Optimization on Grap
 66 Nov 23, 2022
66 Nov 23, 2022