547 Repositories
Python rigid-motion-estimation Libraries
![[ICCV'21] Official implementation for the paper Social NCE: Contrastive Learning of Socially-aware Motion Representations](https://github.com/vita-epfl/social-nce-crowdnav/raw/main/docs/illustration.png)
[ICCV'21] Official implementation for the paper Social NCE: Contrastive Learning of Socially-aware Motion Representations
CrowdNav with Social-NCE This is an official implementation for the paper Social NCE: Contrastive Learning of Socially-aware Motion Representations by
 125 Dec 23, 2022
125 Dec 23, 2022
TorchDistiller - a collection of the open source pytorch code for knowledge distillation, especially for the perception tasks, including semantic segmentation, depth estimation, object detection and instance segmentation.
This project is a collection of the open source pytorch code for knowledge distillation, especially for the perception tasks, including semantic segmentation, depth estimation, object detection and instance segmentation.
 147 Dec 3, 2022
147 Dec 3, 2022
Re-implementation of the Noise Contrastive Estimation algorithm for pyTorch, following "Noise-contrastive estimation: A new estimation principle for unnormalized statistical models." (Gutmann and Hyvarinen, AISTATS 2010)
Noise Contrastive Estimation for pyTorch Overview This repository contains a re-implementation of the Noise Contrastive Estimation algorithm, implemen
 42 Nov 24, 2022
42 Nov 24, 2022

Deep Unsupervised 3D SfM Face Reconstruction Based on Massive Landmark Bundle Adjustment.
(ACMMM 2021 Oral) SfM Face Reconstruction Based on Massive Landmark Bundle Adjustment This repository shows two tasks: Face landmark detection and Fac
 51 Dec 13, 2022
51 Dec 13, 2022

PyTorch implementation of our ICCV2021 paper: StructDepth: Leveraging the structural regularities for self-supervised indoor depth estimation
StructDepth PyTorch implementation of our ICCV2021 paper: StructDepth: Leveraging the structural regularities for self-supervised indoor depth estimat
 112 Nov 28, 2022
112 Nov 28, 2022

Code for ICCV 2021 paper: ARAPReg: An As-Rigid-As Possible Regularization Loss for Learning Deformable Shape Generators..
ARAPReg Code for ICCV 2021 paper: ARAPReg: An As-Rigid-As Possible Regularization Loss for Learning Deformable Shape Generators.. Installation The cod
 132 Nov 28, 2022
132 Nov 28, 2022
The official repo for CVPR2021——ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search.
ViPNAS: Efficient Video Pose Estimation via Neural Architecture Search [paper] Introduction This is the official implementation of ViPNAS: Efficient V
 42 Sep 26, 2022
42 Sep 26, 2022
A curated list of resources for Image and Video Deblurring
A curated list of resources for Image and Video Deblurring
 1.7k Jan 1, 2023
1.7k Jan 1, 2023

This repository is the offical Pytorch implementation of ContextPose: Context Modeling in 3D Human Pose Estimation: A Unified Perspective (CVPR 2021).
Context Modeling in 3D Human Pose Estimation: A Unified Perspective (CVPR 2021) Introduction This repository is the offical Pytorch implementation of
 37 Nov 21, 2022
37 Nov 21, 2022

This is an official implementation of the High-Resolution Transformer for Dense Prediction.
High-Resolution Transformer for Dense Prediction Introduction This is the official implementation of High-Resolution Transformer (HRT). We present a H
 403 Dec 13, 2022
403 Dec 13, 2022
Extreme Rotation Estimation using Dense Correlation Volumes
Extreme Rotation Estimation using Dense Correlation Volumes This repository contains a PyTorch implementation of the paper: Extreme Rotation Estimatio
 29 Nov 18, 2022
29 Nov 18, 2022

Code for "Multi-View Multi-Person 3D Pose Estimation with Plane Sweep Stereo"
Multi-View Multi-Person 3D Pose Estimation with Plane Sweep Stereo This repository includes the source code for our CVPR 2021 paper on multi-view mult
 66 Jan 4, 2023
66 Jan 4, 2023

Dewarping Document Image By Displacement Flow Estimation with Fully Convolutional Network
Dewarping Document Image By Displacement Flow Estimation with Fully Convolutional Network
 39 Aug 2, 2021
39 Aug 2, 2021

Code for Motion Representations for Articulated Animation paper
Motion Representations for Articulated Animation This repository contains the source code for the CVPR'2021 paper Motion Representations for Articulat
 851 Jan 9, 2023
851 Jan 9, 2023
Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation
UniFuse (RAL+ICRA2021) Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation, arXiv, Demo Preparation I
 47 Dec 26, 2022
47 Dec 26, 2022

The personal repository of the work: *DanceNet3D: Music Based Dance Generation with Parametric Motion Transformer*.
DanceNet3D The personal repository of the work: DanceNet3D: Music Based Dance Generation with Parametric Motion Transformer. Dataset and Results Pleas
 36 Dec 21, 2022
36 Dec 21, 2022
Learnable Motion Coherence for Correspondence Pruning
Learnable Motion Coherence for Correspondence Pruning Yuan Liu, Lingjie Liu, Cheng Lin, Zhen Dong, Wenping Wang Project Page Any questions or discussi
 41 Nov 30, 2022
41 Nov 30, 2022

A PyTorch toolkit for 2D Human Pose Estimation.
PyTorch-Pose PyTorch-Pose is a PyTorch implementation of the general pipeline for 2D single human pose estimation. The aim is to provide the interface
 1.1k Dec 30, 2022
1.1k Dec 30, 2022
RIFE: Real-Time Intermediate Flow Estimation for Video Frame Interpolation
RIFE RIFE: Real-Time Intermediate Flow Estimation for Video Frame Interpolation Ported from https://github.com/hzwer/arXiv2020-RIFE Dependencies NumPy
 49 Jan 7, 2023
49 Jan 7, 2023
Deep Learning Head Pose Estimation using PyTorch.
Hopenet is an accurate and easy to use head pose estimation network. Models have been trained on the 300W-LP dataset and have been tested on real data with good qualitative performance.
 1.3k Dec 26, 2022
1.3k Dec 26, 2022

Pytorch implementation of FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks
flownet2-pytorch Pytorch implementation of FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks. Multiple GPU training is supported, a
 2.8k Dec 27, 2022
2.8k Dec 27, 2022

PyTorch implementation for 3D human pose estimation
Towards 3D Human Pose Estimation in the Wild: a Weakly-supervised Approach This repository is the PyTorch implementation for the network presented in:
 579 Dec 22, 2022
579 Dec 22, 2022
PyTorch Implementation of Realtime Multi-Person Pose Estimation project.
PyTorch Realtime Multi-Person Pose Estimation This is a pytorch version of Realtime_Multi-Person_Pose_Estimation, origin code is here Realtime_Multi-P
 157 Nov 12, 2022
157 Nov 12, 2022
MADE (Masked Autoencoder Density Estimation) implementation in PyTorch
pytorch-made This code is an implementation of "Masked AutoEncoder for Density Estimation" by Germain et al., 2015. The core idea is that you can turn
 498 Dec 30, 2022
498 Dec 30, 2022

A pytorch implementation of Detectron. Both training from scratch and inferring directly from pretrained Detectron weights are available.
Use this instead: https://github.com/facebookresearch/maskrcnn-benchmark A Pytorch Implementation of Detectron Example output of e2e_mask_rcnn-R-101-F
 2.8k Dec 29, 2022
2.8k Dec 29, 2022
MediaPipeで姿勢推定を行い、Tokyo2020オリンピック風のピクトグラムを表示するデモ
Tokyo2020-Pictogram-using-MediaPipe MediaPipeで姿勢推定を行い、Tokyo2020オリンピック風のピクトグラムを表示するデモです。 Tokyo2020Pictgram02.mp4 Requirement mediapipe 0.8.6 or later O
 295 Dec 26, 2022
295 Dec 26, 2022

Code for "Human Pose Regression with Residual Log-likelihood Estimation", ICCV 2021 Oral
Human Pose Regression with Residual Log-likelihood Estimation [Paper] [arXiv] [Project Page] Human Pose Regression with Residual Log-likelihood Estima
 347 Dec 24, 2022
347 Dec 24, 2022
Deep Two-View Structure-from-Motion Revisited
Deep Two-View Structure-from-Motion Revisited This repository provides the code for our CVPR 2021 paper Deep Two-View Structure-from-Motion Revisited.
 145 Jan 6, 2023
145 Jan 6, 2023

Single-Stage 6D Object Pose Estimation, CVPR 2020
Overview This repository contains the code for the paper Single-Stage 6D Object Pose Estimation. Yinlin Hu, Pascal Fua, Wei Wang and Mathieu Salzmann.
 89 Dec 26, 2022
89 Dec 26, 2022
PyTorch implementations of algorithms for density estimation
pytorch-flows A PyTorch implementations of Masked Autoregressive Flow and some other invertible transformations from Glow: Generative Flow with Invert
 546 Dec 5, 2022
546 Dec 5, 2022

The Noise Contrastive Estimation for softmax output written in Pytorch
An NCE implementation in pytorch About NCE Noise Contrastive Estimation (NCE) is an approximation method that is used to work around the huge computat
 287 Nov 25, 2022
287 Nov 25, 2022

PyTorch implementation of CloudWalk's recent work DenseBody
densebody_pytorch PyTorch implementation of CloudWalk's recent paper DenseBody. Note: For most recent updates, please check out the dev branch. Update
 401 Nov 19, 2022
401 Nov 19, 2022

GDR-Net: Geometry-Guided Direct Regression Network for Monocular 6D Object Pose Estimation. (CVPR 2021)
GDR-Net This repo provides the PyTorch implementation of the work: Gu Wang, Fabian Manhardt, Federico Tombari, Xiangyang Ji. GDR-Net: Geometry-Guided
 169 Jan 7, 2023
169 Jan 7, 2023

ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021)
ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021) Project Page | Video | Paper | Data We present a novel metho
 65 Nov 28, 2022
65 Nov 28, 2022
Dewarping Document Image By Displacement Flow Estimation with Fully Convolutional Network.
Dewarping Document Image By Displacement Flow Estimation with Fully Convolutional Network
111 Dec 27, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023
HyperPose is a library for building high-performance custom pose estimation applications.
HyperPose is a library for building high-performance custom pose estimation applications.
 1.2k Jan 4, 2023
1.2k Jan 4, 2023

3D Multi-Person Pose Estimation by Integrating Top-Down and Bottom-Up Networks
3D Multi-Person Pose Estimation by Integrating Top-Down and Bottom-Up Networks Introduction This repository contains the code and models for the follo
 124 Jan 6, 2023
124 Jan 6, 2023

Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments (CoRL 2020)
Motion Planner Augmented Reinforcement Learning for Robot Manipulation in Obstructed Environments [Project website] [Paper] This project is a PyTorch
 49 Nov 28, 2022
49 Nov 28, 2022

Demo for Real-time RGBD-based Extended Body Pose Estimation paper
Real-time RGBD-based Extended Body Pose Estimation This repository is a real-time demo for our paper that was published at WACV 2021 conference The ou
 118 Dec 26, 2022
118 Dec 26, 2022

An official TensorFlow implementation of “CLCC: Contrastive Learning for Color Constancy” accepted at CVPR 2021.
CLCC: Contrastive Learning for Color Constancy (CVPR 2021) Yi-Chen Lo*, Chia-Che Chang*, Hsuan-Chao Chiu, Yu-Hao Huang, Chia-Ping Chen, Yu-Lin Chang,
 58 Dec 17, 2022
58 Dec 17, 2022
Code in conjunction with the publication 'Contrastive Representation Learning for Hand Shape Estimation'
HanCo Dataset & Contrastive Representation Learning for Hand Shape Estimation Code in conjunction with the publication: Contrastive Representation Lea
 38 Dec 13, 2022
38 Dec 13, 2022
Robust Consistent Video Depth Estimation
[CVPR 2021] Robust Consistent Video Depth Estimation This repository contains Python and C++ implementation of Robust Consistent Video Depth, as descr
 213 Dec 17, 2022
213 Dec 17, 2022

Implementation of "JOKR: Joint Keypoint Representation for Unsupervised Cross-Domain Motion Retargeting"
JOKR: Joint Keypoint Representation for Unsupervised Cross-Domain Motion Retargeting Pytorch implementation for the paper "JOKR: Joint Keypoint Repres
 45 Dec 25, 2022
45 Dec 25, 2022

VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation
VID-Fusion VID-Fusion: Robust Visual-Inertial-Dynamics Odometry for Accurate External Force Estimation Authors: Ziming Ding , Tiankai Yang, Kunyi Zhan
 86 Nov 18, 2022
86 Nov 18, 2022
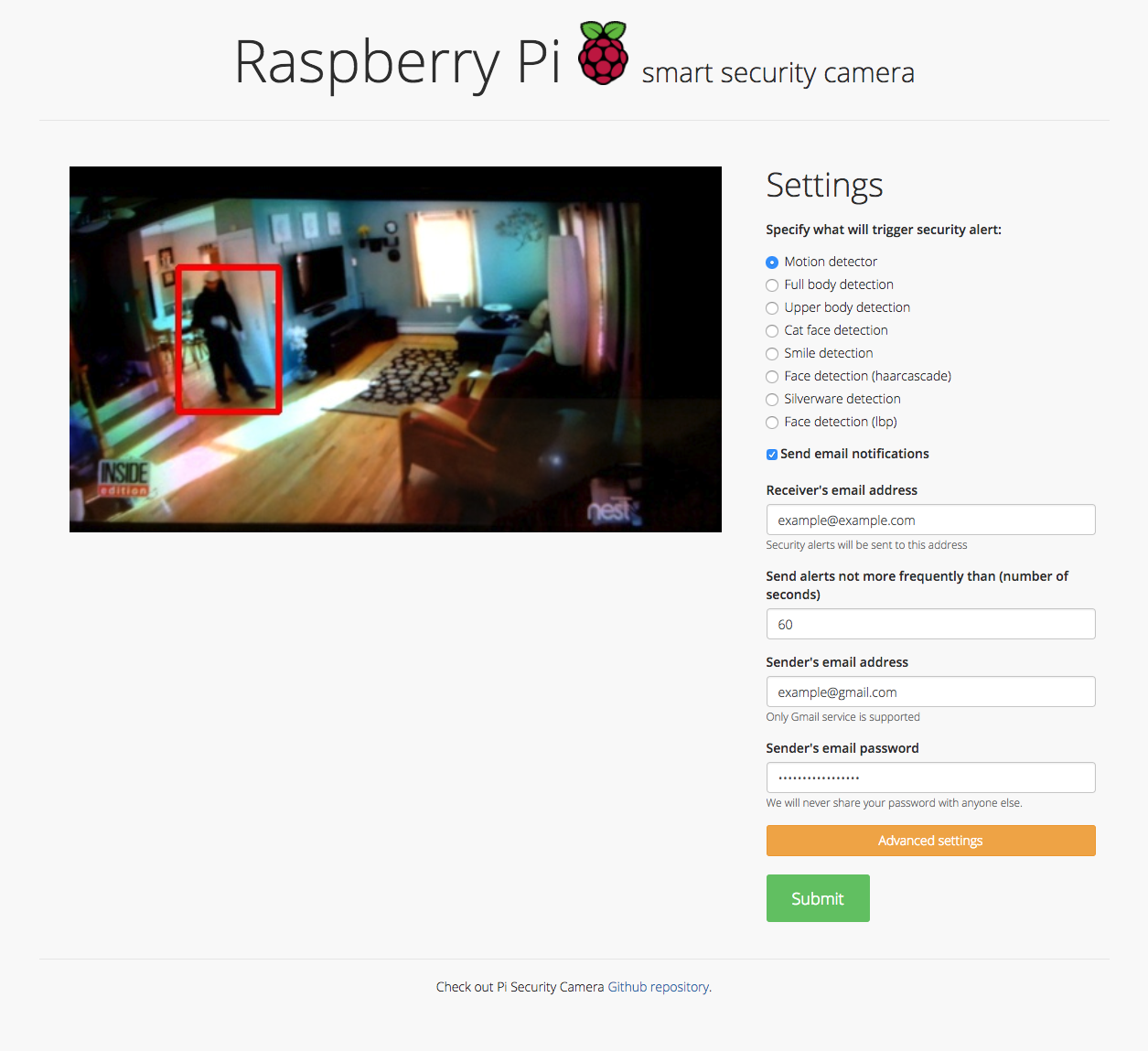
Motion detector, Full body detection, Upper body detection, Cat face detection, Smile detection, Face detection (haar cascade), Silverware detection, Face detection (lbp), and Sending email notifications
Security camera running OpenCV for object and motion detection. The camera will send email with image of any objects it detects. It also runs a server that provides web interface with live stream video.
 10 Jun 30, 2021
10 Jun 30, 2021
This repository contains the code for the paper "Hierarchical Motion Understanding via Motion Programs"
Hierarchical Motion Understanding via Motion Programs (CVPR 2021) This repository contains the official implementation of: Hierarchical Motion Underst
 40 Dec 5, 2022
40 Dec 5, 2022
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022

Official project website for the CVPR 2021 paper "Exploring intermediate representation for monocular vehicle pose estimation"
EgoNet Official project website for the CVPR 2021 paper "Exploring intermediate representation for monocular vehicle pose estimation". This repo inclu
 138 Dec 9, 2022
138 Dec 9, 2022

The project is an official implementation of our paper "3D Human Pose Estimation with Spatial and Temporal Transformers".
3D Human Pose Estimation with Spatial and Temporal Transformers This repo is the official implementation for 3D Human Pose Estimation with Spatial and
 363 Dec 28, 2022
363 Dec 28, 2022

Waymo motion prediction challenge 2021: 3rd place solution
Waymo motion prediction challenge 2021: 3rd place solution 📜 Technical report 🗨️ Presentation 🎉 Announcement 🛆Motion Prediction Channel Website 🛆
 158 Jan 8, 2023
158 Jan 8, 2023

Human POSEitioning System (HPS): 3D Human Pose Estimation and Self-localization in Large Scenes from Body-Mounted Sensors, CVPR 2021
Human POSEitioning System (HPS): 3D Human Pose Estimation and Self-localization in Large Scenes from Body-Mounted Sensors Human POSEitioning System (H
 66 Dec 21, 2022
66 Dec 21, 2022

A large-scale video dataset for the training and evaluation of 3D human pose estimation models
ASPset-510 (Australian Sports Pose Dataset) is a large-scale video dataset for the training and evaluation of 3D human pose estimation models. It contains 17 different amateur subjects performing 30 sports-related actions each, for a total of 510 action clips.
 25 Jun 20, 2021
25 Jun 20, 2021

The code for the CVPR 2021 paper Neural Deformation Graphs, a novel approach for globally-consistent deformation tracking and 3D reconstruction of non-rigid objects.
Neural Deformation Graphs Project Page | Paper | Video Neural Deformation Graphs for Globally-consistent Non-rigid Reconstruction Aljaž Božič, Pablo P
 134 Dec 16, 2022
134 Dec 16, 2022
A large-scale video dataset for the training and evaluation of 3D human pose estimation models
ASPset-510 ASPset-510 (Australian Sports Pose Dataset) is a large-scale video dataset for the training and evaluation of 3D human pose estimation mode
36 Oct 30, 2022

The codes and models in 'Gaze Estimation using Transformer'.
GazeTR We provide the code of GazeTR-Hybrid in "Gaze Estimation using Transformer". We recommend you to use data processing codes provided in GazeHub.
 65 Dec 27, 2022
65 Dec 27, 2022

Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals
LapDepth-release This repository is a Pytorch implementation of the paper "Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals" M
 205 Dec 30, 2022
205 Dec 30, 2022

A lightweight deep network for fast and accurate optical flow estimation.
FastFlowNet: A Lightweight Network for Fast Optical Flow Estimation The official PyTorch implementation of FastFlowNet (ICRA 2021). Authors: Lingtong
 161 Jan 3, 2023
161 Jan 3, 2023

Semi-Supervised 3D Hand-Object Poses Estimation with Interactions in Time
Semi Hand-Object Semi-Supervised 3D Hand-Object Poses Estimation with Interactions in Time (CVPR 2021).
 96 Dec 27, 2022
96 Dec 27, 2022
Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation (RA-L/ICRA 2020)
Aerial Depth Completion This work is described in the letter "Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation", by Lucas
 70 Dec 22, 2022
70 Dec 22, 2022
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation
HPRNet: Hierarchical Point Regression for Whole-Body Human Pose Estimation Official PyTroch implementation of HPRNet. HPRNet: Hierarchical Point Regre
 53 Dec 4, 2022
53 Dec 4, 2022

InsightFace: 2D and 3D Face Analysis Project on MXNet and PyTorch
InsightFace: 2D and 3D Face Analysis Project on MXNet and PyTorch
 13.2k Jan 6, 2023
13.2k Jan 6, 2023

Intruder detection systems are common place now, and readily available in industry, but how do they work? They must detect people and large animals, but not generate false alarms in the presence of small animals, changes in lighting, environmental motion such as trees, or melting snow. To work correctly, the system must learn the background, in order to differentiate foreground objects.
Intruder-Detection Intruder detection systems are common place now, and readily available in industry, but how do they work? They must detect people a
 4 Jul 18, 2021
4 Jul 18, 2021
![[CVPR 2021] Monocular depth estimation using wavelets for efficiency](https://github.com/nianticlabs/wavelet-monodepth/raw/main/assets/combo_kitti.gif)
[CVPR 2021] Monocular depth estimation using wavelets for efficiency
Single Image Depth Prediction with Wavelet Decomposition Michaël Ramamonjisoa, Michael Firman, Jamie Watson, Vincent Lepetit and Daniyar Turmukhambeto
 205 Jan 2, 2023
205 Jan 2, 2023
Camera calibration & 3D pose estimation tools for AcinoSet
AcinoSet: A 3D Pose Estimation Dataset and Baseline Models for Cheetahs in the Wild Daniel Joska, Liam Clark, Naoya Muramatsu, Ricardo Jericevich, Fre
 42 Nov 16, 2022
42 Nov 16, 2022

Detection of drones using their thermal signatures from thermal camera through YOLO-V3 based CNN with modifications to encapsulate drone motion
Drone Detection using Thermal Signature This repository highlights the work for night-time drone detection using a using an Optris PI Lightweight ther
 6 Dec 31, 2022
6 Dec 31, 2022

Python implementation of the Density Line Chart by Moritz & Fisher.
PyDLC - Density Line Charts with Python Python implementation of the Density Line Chart (Moritz & Fisher, 2018) to visualize large collections of time
 10 Jan 6, 2023
10 Jan 6, 2023

Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences
Model-free Vehicle Tracking and State Estimation in Point Cloud Sequences 1. Introduction This project is for paper Model-free Vehicle Tracking and St
 92 Jan 3, 2023
92 Jan 3, 2023
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging This repository contains an implementation
 1.1k Jan 2, 2023
1.1k Jan 2, 2023
Package pyVHR is a comprehensive framework for studying methods of pulse rate estimation relying on remote photoplethysmography (rPPG)
Package pyVHR (short for Python framework for Virtual Heart Rate) is a comprehensive framework for studying methods of pulse rate estimation relying on remote photoplethysmography (rPPG)
 261 Jan 3, 2023
261 Jan 3, 2023

Official implementation of the network presented in the paper "M4Depth: A motion-based approach for monocular depth estimation on video sequences"
M4Depth This is the reference TensorFlow implementation for training and testing depth estimation models using the method described in M4Depth: A moti
 76 Jan 3, 2023
76 Jan 3, 2023

Python and C++ implementation of "MarkerPose: Robust real-time planar target tracking for accurate stereo pose estimation". Accepted at LXCV @ CVPR 2021.
MarkerPose: Robust real-time planar target tracking for accurate stereo pose estimation This is a PyTorch and LibTorch implementation of MarkerPose: a
 47 Nov 18, 2022
47 Nov 18, 2022
[WACV 2020] Reducing Footskate in Human Motion Reconstruction with Ground Contact Constraints
Reducing Footskate in Human Motion Reconstruction with Ground Contact Constraints Official implementation for Reducing Footskate in Human Motion Recon
 38 Nov 1, 2022
38 Nov 1, 2022
The implemention of Video Depth Estimation by Fusing Flow-to-Depth Proposals
Flow-to-depth (FDNet) video-depth-estimation This is the implementation of paper Video Depth Estimation by Fusing Flow-to-Depth Proposals Jiaxin Xie,
 32 Jun 14, 2022
32 Jun 14, 2022

PyTorch implementation DRO: Deep Recurrent Optimizer for Structure-from-Motion
DRO: Deep Recurrent Optimizer for Structure-from-Motion This is the official PyTorch implementation code for DRO-sfm. For technical details, please re
 56 Dec 12, 2022
56 Dec 12, 2022
A simple 3D rigid body simulation written in python
pyRigidBody3d A simple 3D rigid body simulation written in python
 30 Oct 7, 2022
30 Oct 7, 2022

Fashion Landmark Estimation with HRNet
HRNet for Fashion Landmark Estimation (Modified from deep-high-resolution-net.pytorch) Introduction This code applies the HRNet (Deep High-Resolution
 91 Dec 26, 2022
91 Dec 26, 2022
Estimation of human density in a closed space using deep learning.
Siemens HOLLZOF challenge - Human Density Estimation Add project description here. Installing Dependencies: Install Python3 either system-wide, user-w
 3 Aug 8, 2021
3 Aug 8, 2021

Drone-based Joint Density Map Estimation, Localization and Tracking with Space-Time Multi-Scale Attention Network
DroneCrowd Paper Detection, Tracking, and Counting Meets Drones in Crowds: A Benchmark. Introduction This paper proposes a space-time multi-scale atte
 98 Nov 16, 2022
98 Nov 16, 2022

Code for "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds", CVPR 2021
PV-RAFT This repository contains the PyTorch implementation for paper "PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clou
 43 Dec 5, 2022
43 Dec 5, 2022

Face Detection & Age Gender & Expression & Recognition
Face Detection & Age Gender & Expression & Recognition
 188 Dec 28, 2022
188 Dec 28, 2022

Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation
CorDA Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation Prerequisite Please create and activate the follo
 60 Nov 30, 2022
60 Nov 30, 2022
Incorporating Transformer and LSTM to Kalman Filter with EM algorithm
Deep learning based state estimation: incorporating Transformer and LSTM to Kalman Filter with EM algorithm Overview Kalman Filter requires the true p
 57 Dec 27, 2022
57 Dec 27, 2022

Unofficial & improved implementation of NeRF--: Neural Radiance Fields Without Known Camera Parameters
[Unofficial code-base] NeRF--: Neural Radiance Fields Without Known Camera Parameters [ Project | Paper | Official code base ] ⬅️ Thanks the original
 239 Dec 22, 2022
239 Dec 22, 2022

Location-Sensitive Visual Recognition with Cross-IOU Loss
The trained models are temporarily unavailable, but you can train the code using reasonable computational resource. Location-Sensitive Visual Recognit
 146 Dec 25, 2022
146 Dec 25, 2022

Official Pytorch implementation of "Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video", CVPR 2021
TCMR: Beyond Static Features for Temporally Consistent 3D Human Pose and Shape from a Video Qualtitative result Paper teaser video Introduction This r
 215 Jan 6, 2023
215 Jan 6, 2023

SNE-RoadSeg in PyTorch, ECCV 2020
SNE-RoadSeg Introduction This is the official PyTorch implementation of SNE-RoadSeg: Incorporating Surface Normal Information into Semantic Segmentati
 242 Dec 20, 2022
242 Dec 20, 2022

This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution Network.
Lite-HRNet: A Lightweight High-Resolution Network Introduction This is an official pytorch implementation of Lite-HRNet: A Lightweight High-Resolution
675 Dec 25, 2022

Code for "Single-view robot pose and joint angle estimation via render & compare", CVPR 2021 (Oral).
Single-view robot pose and joint angle estimation via render & compare Yann Labbé, Justin Carpentier, Mathieu Aubry, Josef Sivic CVPR: Conference on C
 51 Oct 14, 2022
51 Oct 14, 2022
Synthesizing Long-Term 3D Human Motion and Interaction in 3D in CVPR2021
Long-term-Motion-in-3D-Scenes This is an implementation of the CVPR'21 paper "Synthesizing Long-Term 3D Human Motion and Interaction in 3D". Please ch
 76 Dec 13, 2022
76 Dec 13, 2022

WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose
WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose Yijun Zhou and James Gregson - BMVC2020 Abstract: We present an end-to-end head-pos
 368 Dec 26, 2022
368 Dec 26, 2022
Just Go with the Flow: Self-Supervised Scene Flow Estimation
Just Go with the Flow: Self-Supervised Scene Flow Estimation Code release for the paper Just Go with the Flow: Self-Supervised Scene Flow Estimation,
 50 Nov 22, 2022
50 Nov 22, 2022
(Arxiv 2021) NeRF--: Neural Radiance Fields Without Known Camera Parameters
NeRF--: Neural Radiance Fields Without Known Camera Parameters Project Page | Arxiv | Colab Notebook | Data Zirui Wang¹, Shangzhe Wu², Weidi Xie², Min
 411 Dec 26, 2022
411 Dec 26, 2022

CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering" official PyTorch implementation.
LED2-Net This is PyTorch implementation of our CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering". Y
 83 Jan 4, 2023
83 Jan 4, 2023

Official PyTorch implementation of CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds Introduction This is the official PyTorch implementation of o
 96 Dec 7, 2022
96 Dec 7, 2022
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks
Bayesian-Torch is a library of neural network layers and utilities extending the core of PyTorch to enable the user to perform stochastic variational inference in Bayesian deep neural networks. Bayesian-Torch is designed to be flexible and seamless in extending a deterministic deep neural network architecture to corresponding Bayesian form by simply replacing the deterministic layers with Bayesian layers.
 210 Jan 4, 2023
210 Jan 4, 2023
OpenMMLab Pose Estimation Toolbox and Benchmark.
Introduction English | 简体中文 MMPose is an open-source toolbox for pose estimation based on PyTorch. It is a part of the OpenMMLab project. The master b
 2.8k Dec 31, 2022
2.8k Dec 31, 2022
Sandbox for training deep learning networks
Deep learning networks This repo is used to research convolutional networks primarily for computer vision tasks. For this purpose, the repo contains (
 2.7k Jan 1, 2023
2.7k Jan 1, 2023

(NeurIPS 2020) Wasserstein Distances for Stereo Disparity Estimation
Wasserstein Distances for Stereo Disparity Estimation Accepted in NeurIPS 2020 as Spotlight. [Project Page] Wasserstein Distances for Stereo Disparity
 92 Dec 12, 2022
92 Dec 12, 2022
POT : Python Optimal Transport
This open source Python library provide several solvers for optimization problems related to Optimal Transport for signal, image processing and machine learning.
 1.7k Jan 4, 2023
1.7k Jan 4, 2023